Show Point Clouds and Poses¶
Function
Display Point Clouds and Poses.
Sample Scenario
This Step can display the relative position between the point cloud(s) and pose(s) and is usually used in debugging phase. For example, in a picking application, it can be used to check if the poses are correct.
Input and Output
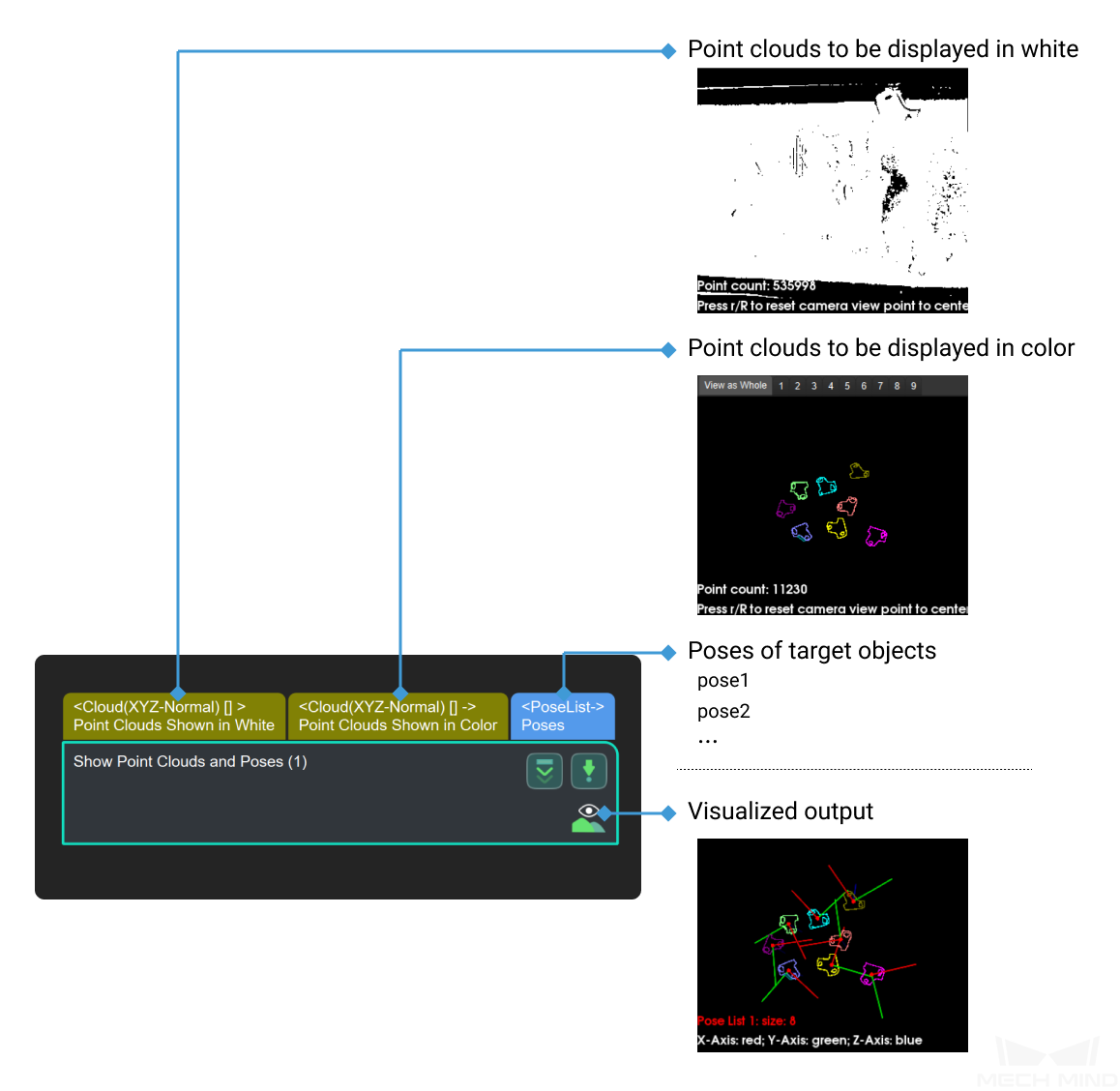
Parameter Tuning
Normal Vector Visualization Settings
Show Normals
Default:FalseOptions:True,FalseDescription: Whether to display the point cloud normal vectors or not.Display Interval of Normals
Default: 20Instruction: This parameter is shown only when Show Normals is set toTrue. The unit is mm. The greater the value, the sparser the normal vectors are displayed.Example: As shown below, the left part is the point cloud displayed without normals, and the right part is the point cloud displayed with normals at an interval of 20 mm.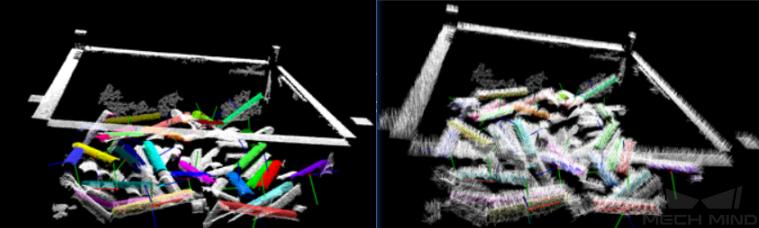
Z Value Visualization Settings
Visualize Z Value
Default:FalseOptions:True,FalseInstruction: When set toTrue, points of the point cloud will be displayed in an ascending order of brightness along the positive Z-axis.Upper Bound
Default: 0Instruction: This parameter is only valid when Visualize Z Value is set toTrue. This value sets the upper bound of the range which the points need to be colored along the positive Z-axis. The larger the value, the dimmer the overall display.Lower Bound
Default: 0Instruction: This parameter is only valid when Visualize Z Value is set toTrue. This value sets the lower bound of the range which the points need to be colored along the positive Z-axis. The smaller the value, the brighter the overall display.Show Curvature
Default:FalseOptions:True,FalseInstruction: This parameter shows points of object parts with different curvatures in different colors. Red is used for large curvatures, blue for medium curvatures, and green for small curvatures.Example: As shown below, the left part is the point cloud displayed without curvatures and the right part is the point cloud displayed with curvatures.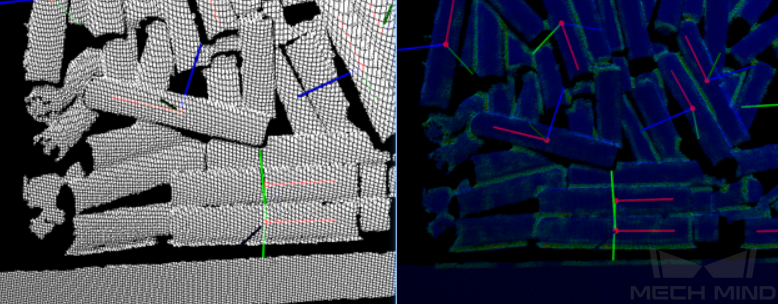
Comparison of Similar Steps
Show Point Clouds and Poses is used for checking the point clouds and poses. Show Images is used for checking the color images and masks.