Hand-Eye Calibration Guide¶
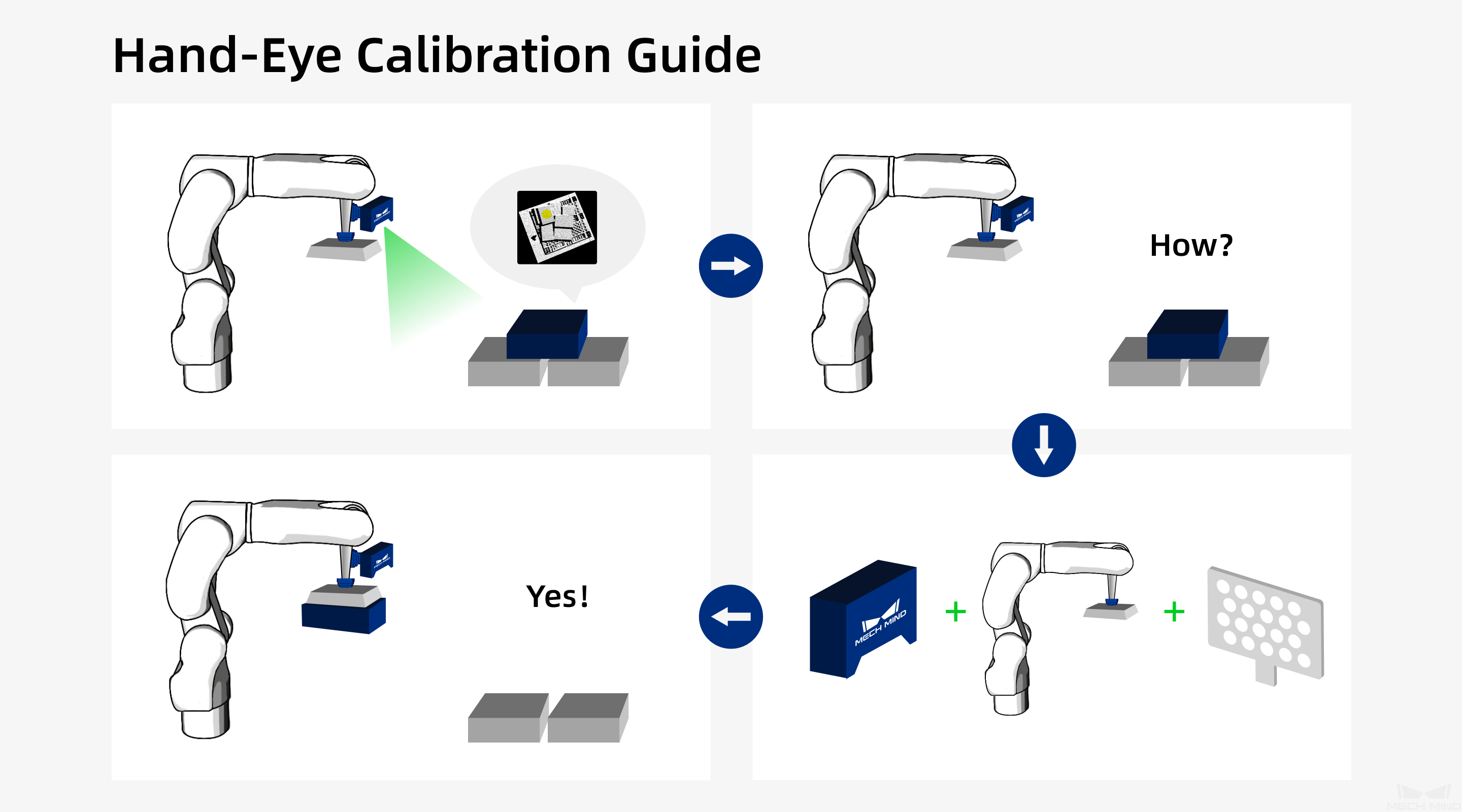
Hand-eye calibration establishes the transformation relationship between the camera and robot coordinate systems. With this relationship, the object pose determined by Mech-Vision can be transformed into the robot coordinate system and used to guide the robot to perform its tasks. To achieve the coordinate transformation from the target point on the image to the pick point on the actual object, accurate intrinsic and extrinsic parameters of the camera are indispensable.
What are the intrinsic parameters?
Intrinsic parameters are internal to a camera, including the focal length, the lens distortion, etc. These parameters are usually calibrated and stored in the camera before the camera leaves the factory.
What are the extrinsic parameters?
The extrinsic parameters describe the pose transformation between the robot coordinate system and the camera coordinate system. The calibration of extrinsic parameters is also called the hand-eye calibration, where the camera is considered as the eye, and the robot the hand. As the spatial relationship between the robot and the camera changes from application to application, the hand-eye calibration needs to be conducted on site to guarantee its accuracy.
You will need to complete some necessary preparation before starting the calibration. See the section below for more information.
Mech-Vision provides two calibration modes: standard and quick. For the first time, please use the standard mode to perform the calibration.
If the workstation camera is replaced, you will need to calibrate the new camera. The quick mode can be used to conveniently calibrate a new camera of the same model.
Once you have completed the calibration, refer to the following section for evaluating calibration results.
Please refer to the following section for solutions to common problems in calibration.