Start Calibration - Standard Mode¶
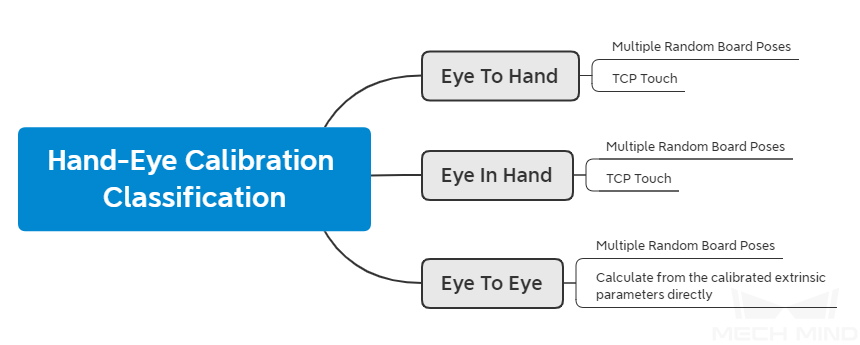
The difference between multiple random board poses method and TCP touch method is as follows:
The multiple random board poses method utilizes multiple poses either generated automatically by Mech-Vision or added manually. Images are captured in each pose and the circles on the calibration board are recognized, therefore establishing the spatial relationship among the calibration board, camera, and robot. It is easy to perform and has a high accuracy.
The TCP touch method first determines the pose of the calibration board through the three-point method, and then establishes the spatial relationship among the calibration board, camera, and robot. This method is suited for situations where the robot is installed in a limited space and where the calibration board cannot be installed.
You can choose the calibration method that best suits the actual conditions on your site, and refer to the corresponding section below.
For cases where the robot cannot be controlled by Mech-Viz, you can add poses manually to perform the hand-eye calibration.