Calculate Pick Points According To The Heat Map Of Grasp Probability¶
Input the heat map of grasp probability of the pick points, the original depth image and the color image, calculate the planar pick points and assign the gripper (this project use a suction cup) label for it. The program of this procedure is shown in Figure 1.
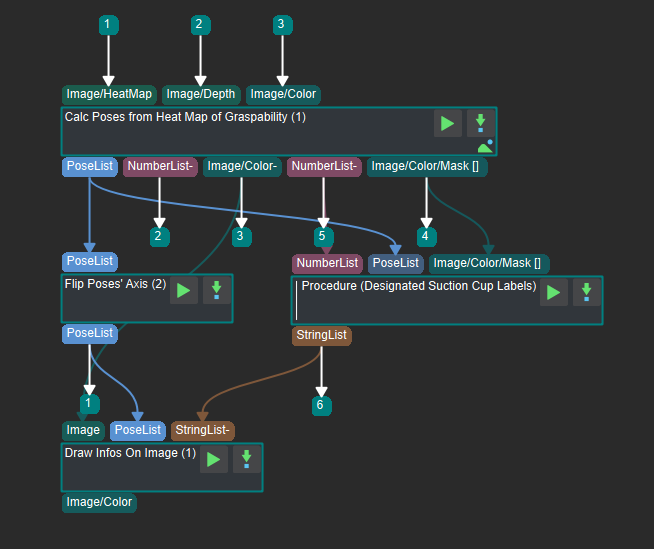
Figure 1 The program of calculating pick points (small value range) according to the heat map of grasp probability in Mech-Vision¶
The introduction of each step in the program ia as follows :
Calc Poses From Heat Map Of Graspability : Input the heat map of grasp probability, the original depth image and the color image, output the planar pick points which meet the requirement and the corresponding confidence, the color image with the above results, the diameter of the grippers corresponding to each Pick Point and the mask of the gripping area.
Flip Poses’ Axes : Input the planar pick points calculated in the previous step, rotate the specified axis of the pick points to a specific direction and then output it.
Assign Suction Cup Label : Specify suction cup label for the planar pick points obtained in the first step.
Visualize Information on Image : Mark the the flipped planar pick points and their corresponding suction cup labels on the input color image.
Assign Suction Cup Label¶
Input the planar pick points, their confidence levels and the mask of the grabbing area obtained in Calc Poses From Heat Map Of Graspability , specify the classification standard of grabbing objects and generate the label file. The program of this procedure is shown in Figure 2.
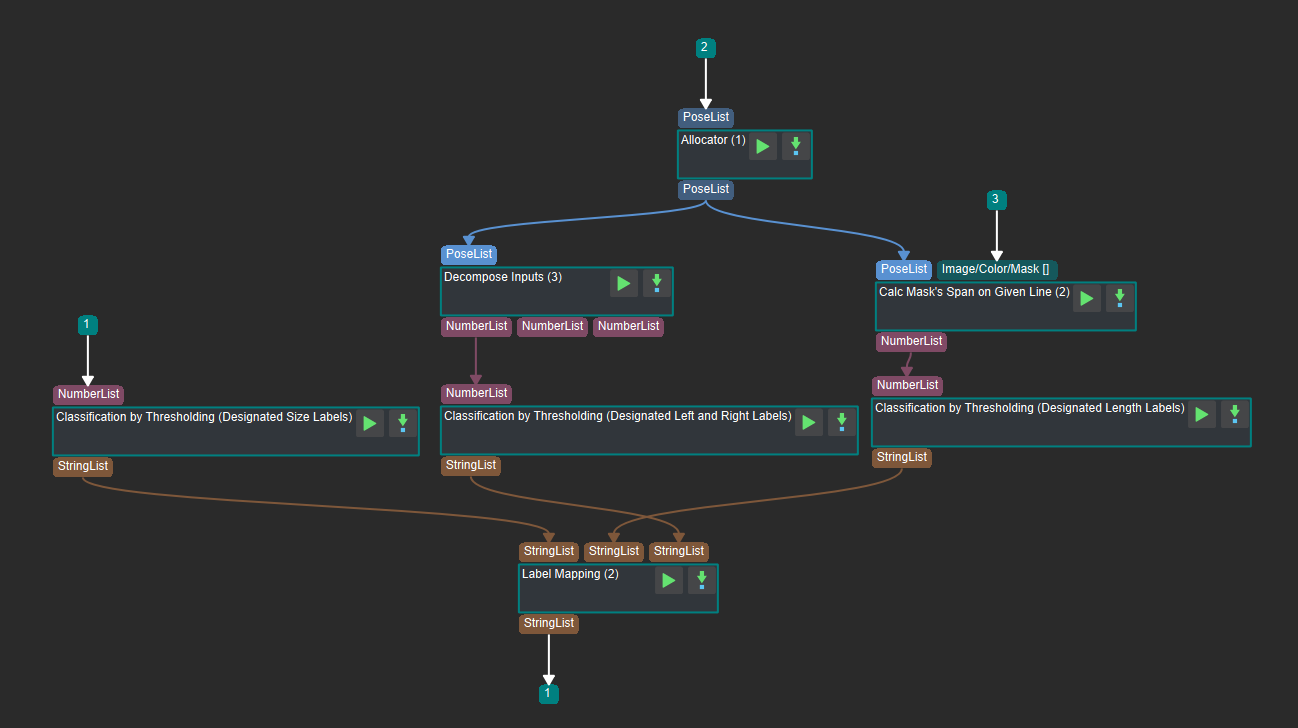
Figure 2 The program of assigning suction cup label in Mech-Vision¶
The introduction of each step in the program is as follows :
Stratify Values by Thresholds : Input the array which need to be classified, classify it according to the threshold and the label file in the setting then output the label.
Calc Mask’s Span on Given Line : Input the planar pick points and its corresponding mask in the grabbing area, calculate the length of the planar pick points in the mask and then output it.
Allocator : Allocate the inputs to the next few steps.
Decompose Object Dimensions : Decompose a 3D input into three 1D lists, output the corresponding lists according to the requirements.
Label Mapping : Input the labels obtained through different classification standards and obtained a single label list according to the rule of label setting.