3D Boundary Extraction¶
The main function of 3D boundary extraction is to remove the features inside the object, and only keep the boundary of the object. The combination is as Figure 1 shown.
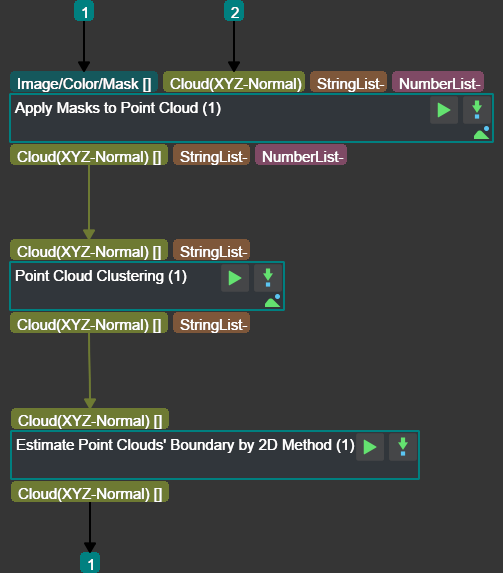
Figure 1 Procedure of 3D boundary extraction¶
The role of each Step is as follows:
Apply Masks to Point Cloud Take the point clouds of workpieces and masks as input to obtain the point cloud in the area of masks.
Point Cloud Clustering Take point cloud with normal vector as input, filter out some useless small point cloud or large background through point cloud clustering. Prepare for the subsequent boundary estimation of the point cloud.
Estimate Point Cloud Edges by 2D Method Take the point clouds after clustering as input, and estimate point cloud edges by 2D method.