Pick Points Filtering and Sorting¶
The main function of this procedure is sorting and filtering the pick points according to the specifications. According to the requirements of practical project, one or more different specifications can be set to obtain pick points with high grasp probability, which are used for subsequent planning of picking task. The procedure is shown in Figure 1.
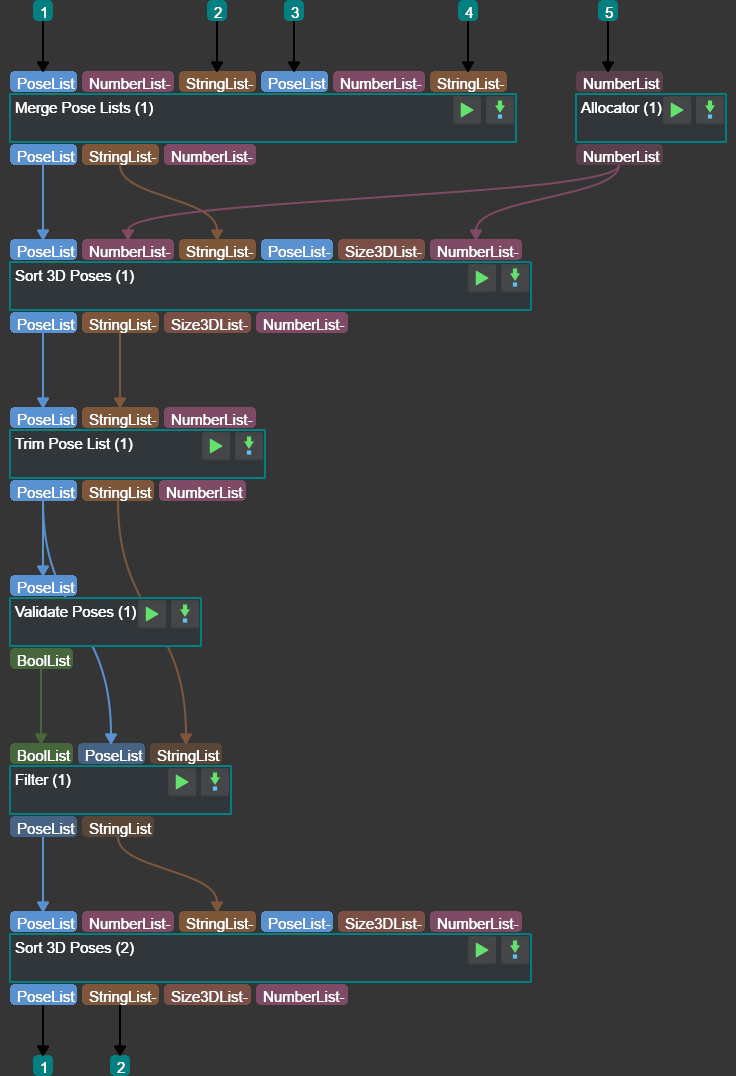
Figure 1 Procedure of pick points filtering and sorting¶
The role of each Step is as follows:
Merge Pose Lists Merge the two input pick point lists and their corresponding label lists into one and output them respectively.
Allocator Allocate the input list of pick points confidence to the subsequent Steps.
Sort 3D Poses Based on the input list of pick points and the corresponding confidence and label lists, sort the pick points according to the specified criteria (confidence), and output the sorted list of pick points and the corresponding label list.
Trim Pose List Input the result of the previous step and output several pick points with high confidence to speed up subsequent calculations.
Validate Poses by Included Angle to Reference Direction Take the list of selected pick points as input to convert each pick point to True or False according to the set value and output the Boolean value list.
Filter Based on the Boolean value list, the pick point list and the corresponding label list, choose the pick points corresponding to True or False, and output the list of selected pick point and its corresponding label list.
Sort 3D Poses Based on the filtered pick points and the corresponding labels, sort the pick points again according to the specified criteria (the value corresponding to the Z axis), and output the sorted pick points and the corresponding labels .