Sort 3D Poses¶
Function
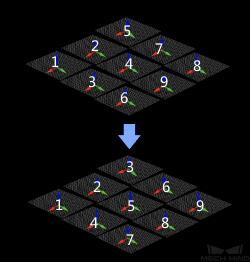
Sort the 3D poses according to specified rules.
Sample Scenario
Sort the poses output from other Steps according to the required rules for subsequent pose processing or robot trajectory planning.
Input and Output
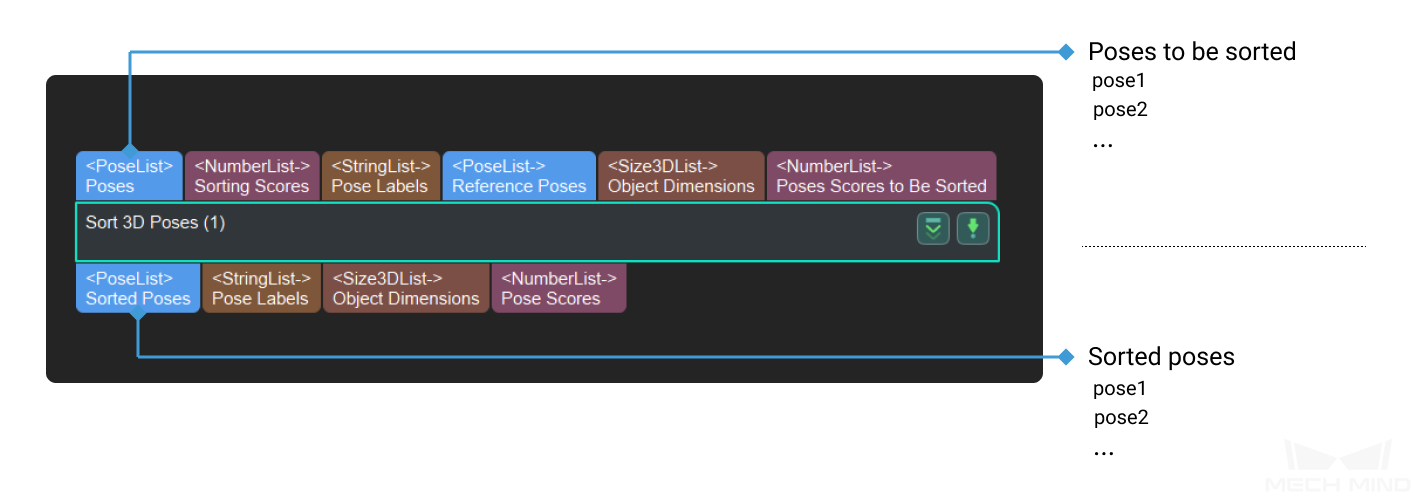
Parameters
sort strategy
sortMethod
Default Value: NONEList of Values: NONE, SORT_BY_X, SORT_BY_Y, SORT_BY_Z, SORT_BY_DIS2BasePt, SORT_BY_DIS2BasePtOnXYPlane, SORT_BY_CONFIDENCE, SORT_BY_CUSTOM_DIRInstruction: SORT_BY_X, SORT_BY_Y, and SORT_BY_Z refer to sorting poses according to the length of corresponding componet along X, Y, and Z axes. SORT_BY_DIS2BasePt means sorting poses according to the distance between the pose and the base point. To use this method, setting the base point in the below part is necessary. SORT_BY_DIS2BasePtOnXYPlane is sorting poses according to the projection length of the line connecting the pose to the base point in the XY plane. SORT_BY_CONFIDENCE is sorting pose according to the confidence, and this method requires the second input. SORT_BY_CUSTOM_DIR is customized direction sorting, which need to modify the custom direction in the below.isAscending
Default Value: TrueList of Values: True, FalseInstruction: Whether the pose is ranked in ascending order of parameters.base_point
baseX
Default Value: 0Instruction: X coordinate value of the base point.baseY
Default Value: 0Instruction: Y coordinate value of the base point.baseZ
Default Value: 0Instruction: X coordinate value of the base point.custom_direction
dirX
Default Value: 0Instruction: X-axis direction vector.dirY
Default Value: 0Instruction: Y-axis direction vector.dirZ
Default Value: 1Instruction: Z-direction direction vector.