Matching¶
According to the point cloud situation of the template, Match can be divided into edge template matching and full template matching. According to the sorts of the template, Match can be divided into single template matching and multiple templates matching. This chapter mainly introduces single template matching and multiple templates matching in full template.
Template selection
Template selection mainly decided by point cloud effect,project accuracy, beat and other important factors.
- Edge template matching apply to:
Pose output scence without high precision. Such as using flexible fixture.
Scenes with low quality point cloud.
Scenes with certain restrictions on the beat.
- Full template matching apply to:
Pose output scence with high precision. Such as using rigidity fixture.
Scenes with high quality point cloud.
For scenes where the beat requirement is not so high.
Selection of matching methods
Select according to the type of template that needs to be matched. Multiple object matching options, multiple template matching. For single object matching, select ordinary 3D matching.
Template making
Collect the original point cloud image: Obtain the point cloud image through the camera and save it.
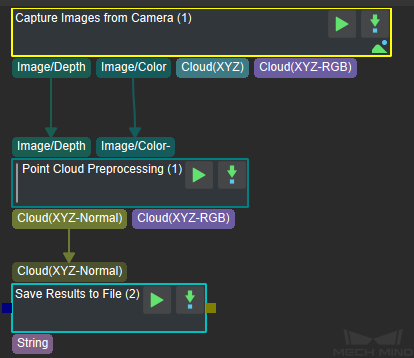
Figure1 Collect the Original Point Cloud Image¶
The user also can performs the collection operation in Mech-Vision’s .
Make point cloud full template file: Open the collected original point cloud image in the of Mech-Vision, and edit the point cloud to remove noise.
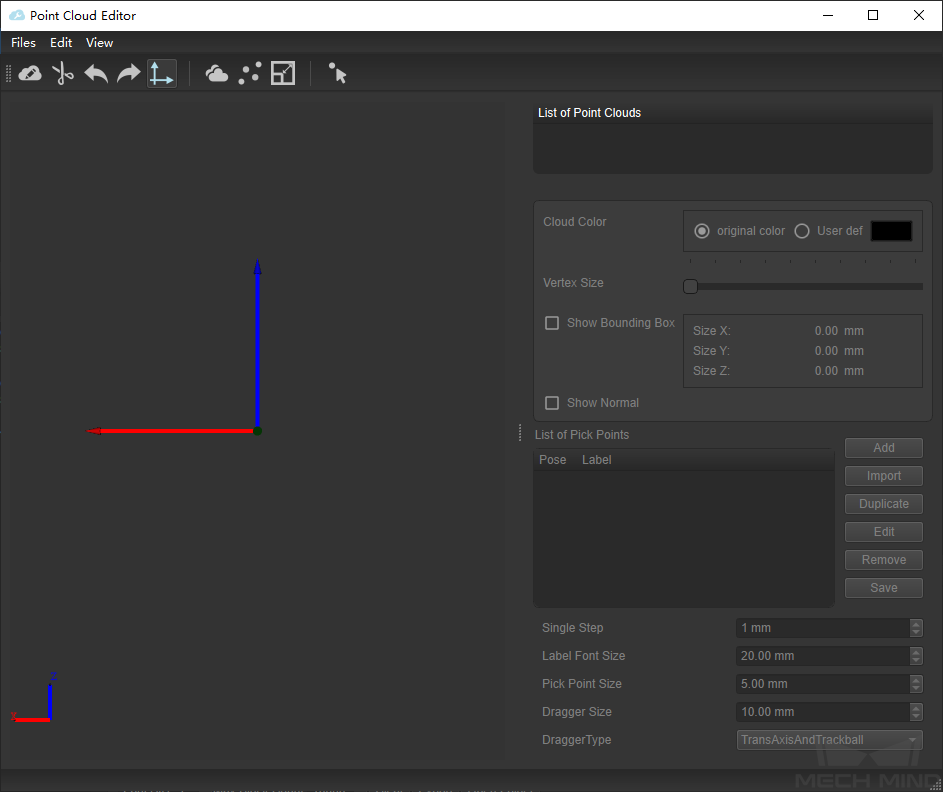
Figure2 Pose Cloud Editor¶
Edge extraction: Roughly edge extraction through the full template file.
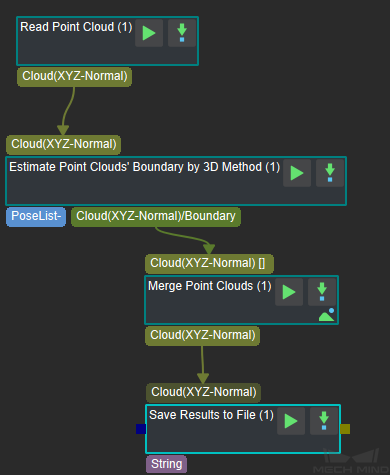
Figure3 Edge extraction¶
Create edge template file: Remove the noise of the point cloud edge file in Point Cloud Editor and save it as an edge template file.
Crawl point settings
Refer to Add Pick Point .
Matching basic step combination
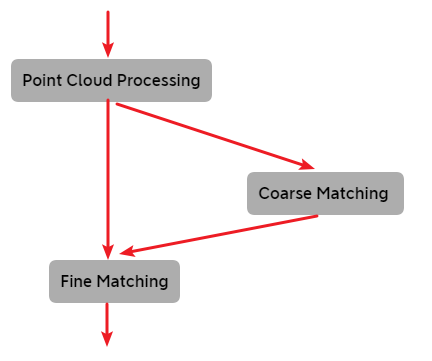
Figure4 Matching¶
As shown in Figure 4, the basic procedure of matching includes three parts: Point Cloud Processing , Coarse Matching and Fine Matching . The specific process is as follows:
The final optimization of the point cloud input into the matching is completed by the Point Cloud Processing part.
Coarse Matching through the matching between the template point cloud and the scene point cloud, the candidate pose conversion relationship between the scene point cloud and the template point cloud is calculated.
Fine Matching Partial matching of the template according to the iterative algorithm can improve the matching accuracy.
3D Matching¶
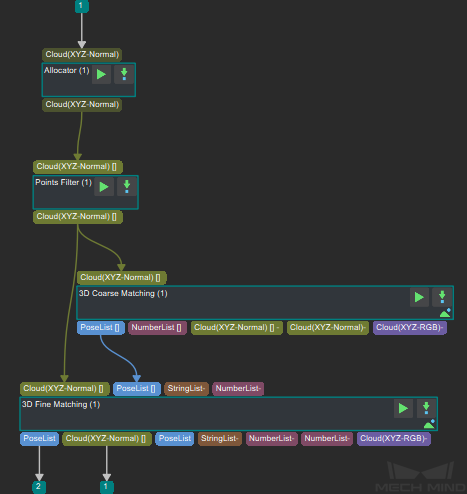
Figure 5 3D Matching¶
Example result
Input point cloud image to be matched.

Figure6 Input Point Cloud Image to be Matched.¶
Point cloud full template.
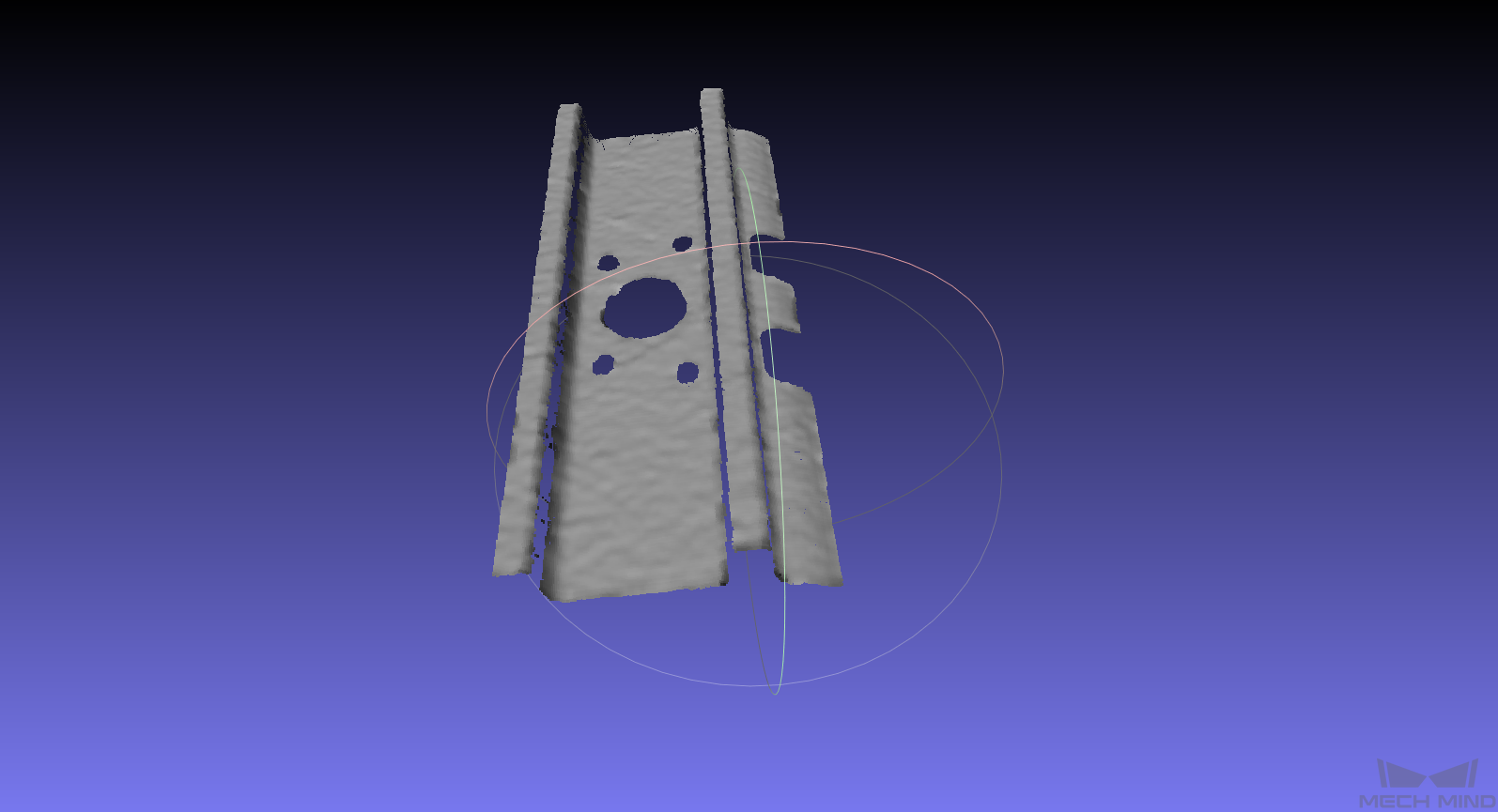
Figure7 Point Cloud Full Template¶
3D matching result

Figure8 3D Matching Result¶
3D Multiple Template Matching¶
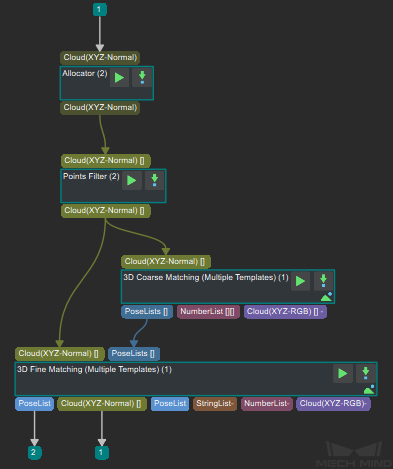
Figure9 3D Multiple Template Matching¶
Result example
Input point cloud image to be matched.
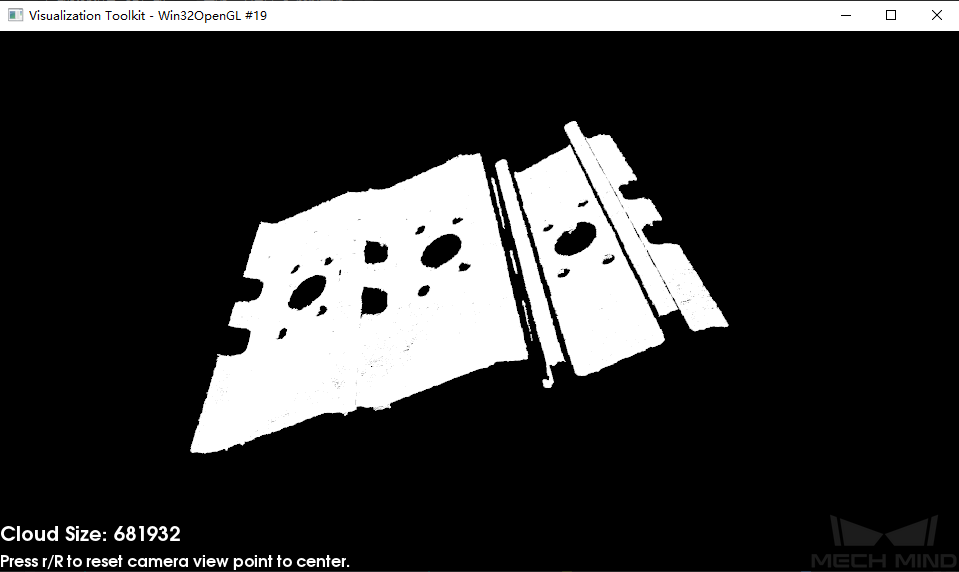
Figure10 Point Cloud Image to be Matched¶
Point cloud full template.
Figure11 Point Cloud Full Template1¶
Figure12 Point Cloud Full Template2¶
3D meatching result
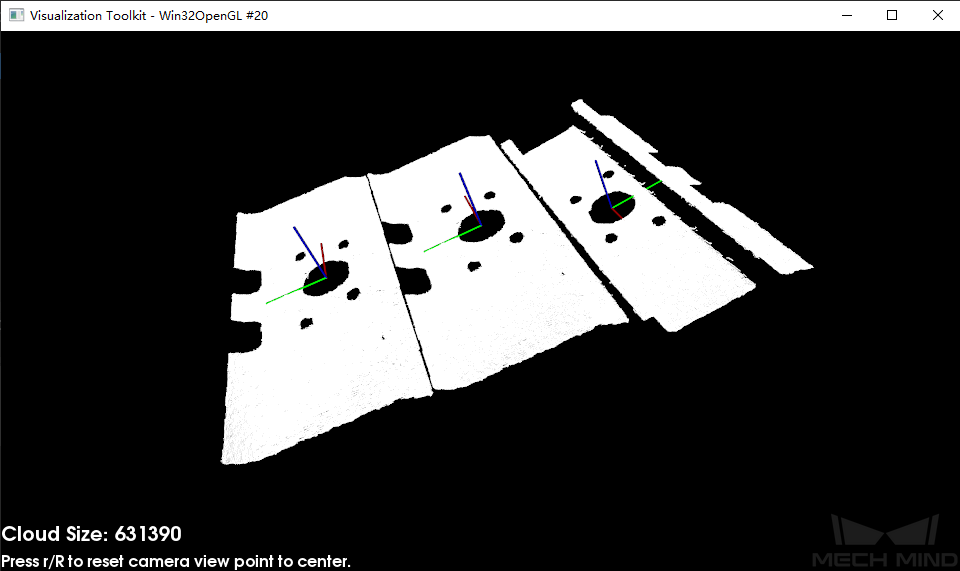
Figure13 3D Meatching Result¶