Add Pick Point¶
The robot needs a picking pose provided by Mech-Vision to actually perform the picking. The picking pose is transformed from the pick point on the target object. Therefore, pick points need to be added to point cloud models, so that Mech-Vision can generate pick points for target objects through matching, and further output picking poses for the robot.
Note
Mech-Vision’s algorithm requires one and only one “geometric center” for every point cloud model.
The first pick point you add will be automatically set as the geometric center.
The geometric center can be a pick point at the same time.
There are two ways for you to add pick points in Matching Model and Pick Point Editor:
Add pick point:
Directly add and adjust a pick point in Matching Model and Pick Point Editor
Select a point cloud model first to enable this button
Add pick point by teaching:
Adjust the robot pose manually through the teach pendant and obtain the pick point. Used in cases that require high picking accuracy or where TCP measurement is difficult
Add the pick point first, and then generate the point cloud model through image acquisition by the camera
Add pick point
Select the point cloud model for adding pick point in the Model Files List, and then click on
in the Toolbar to add a pick point.Hint
By default, pick points added using
are placed at the geometric center of the point cloud model’s bounding box.Select this pick point in the Model Files List to adjust it. There are two ways you can adjust a pick point:
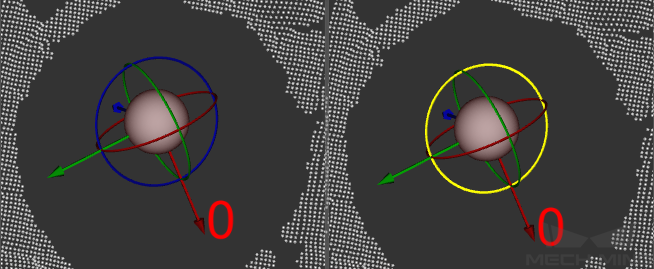
By dragging the drag handles on the pick point: while holding the Ctrl key, click and drag a handle to move the pick point along the axis of this handle.
Hint
A drag handle is successfully selected if it turns yellow after being clicked. In the figure below, the left image is before selection and the right after.
By editing the pose data: Pose editing can be done below the CAD Files List. Please see Pose Editing Widget for instructions.
Add pick point by teaching
You’ll need to input the TCP manually when adding a pick point this way. Therefore, please have the TCP data ready for use beforehand.
Tip
If you are using Mech-Viz, you can check the TCP by going into and double-clicking on the corresponding end effector model.
The procedure for adding a pick point by teaching differs depending on how your camera is installed. Click on the options below for detailed instructions for ETH and EIH.
Note
Mech-Vision automatically determines how the camera is installed based on the extrinsic parameters in the project, and shows the corresponding Add Pick Point by Teaching window.
If the robot is connected through Mech-Center, the picking pose and the image capturing pose can be obtained automatically. Otherwise, these poses must be input manually.
Add pick point by teaching under ETH
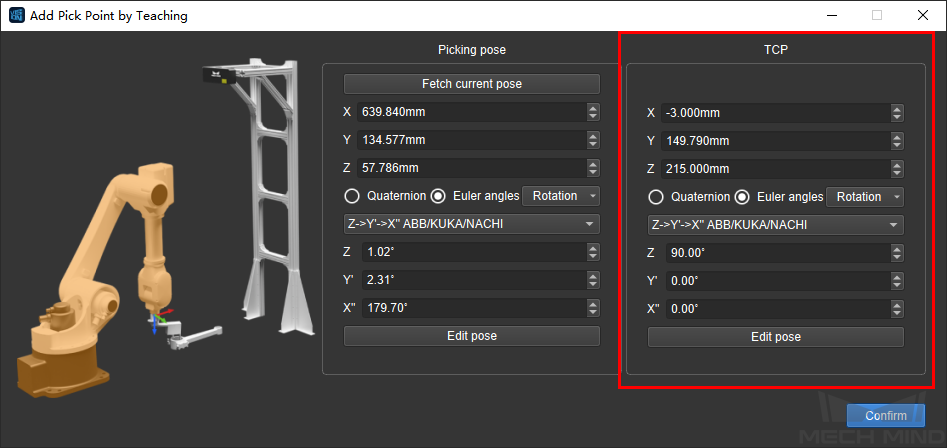
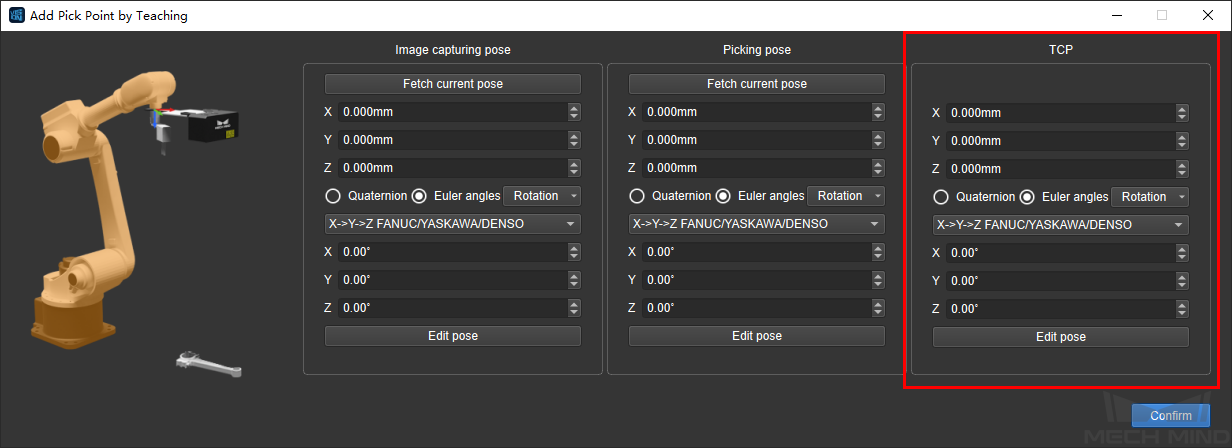
Click on
in the Toolbar to open the Add Pick Point by Teaching window.Input the TCP obtained beforehand into the TCP section.
Move the robot to the picking pose using the teach pendant. Operate the end effector to perform picking to make sure the picking pose is accurate.
Hint
If you are using a fingered gripper, you can grasp and drop the target object several times to make sure that the object can be firmly grasped in this picking pose.
In the Picking Pose section, click on Fetch current pose, or input the pose displayed on the teach pendant manually. Click on Confirm to generate a pick point.
The newly generate pick point will show up in the Model Files List.
Move the robot outside the camera’s field of view. Be careful not to touch the target object in this process to avoid altering its pose.
Generate the point cloud model of the target object using the connected camera. Please follow the instructions in Generate Point Cloud Model of using a real camera.
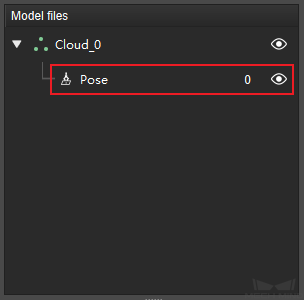
In the Model Files List, select the pick point generated in step 4 and drag it onto the point cloud model to associate the pick point with the model.
Successfully associated pick point will be nested below the point cloud model.
Add pick point by teaching under EIH
Under EIH, you also need to obtain the image capturing pose in addition to the picking pose.
Click on
in the Toolbar to open the Add Pick Point by Teaching window.Input the TCP obtained beforehand into the TCP section.
Move the robot to the picking pose using the teach pendant. Operate the end effector to perform picking to make sure the picking pose is accurate.
Hint
If you are using a fingered gripper, you can grasp and drop the target object several times to make sure that the object can be firmly grasped in this picking pose.
In the Picking Pose section, click on Fetch current pose, or input the pose displayed on the teach pendant manually.
Move the robot outside the camera’s field of view. Be careful not to touch the target object in this process to avoid altering its pose.
Move the robot to the image capturing pose using the teach pendant. Capture an image to check if the pose is accurate.
In the Image Capturing Pose section, click on Fetch current pose, or input the pose displayed on the teach pendant manually. Click on Confirm to generate a pick point.
The newly generate pick point will show up in the Model Files List.
Generate the point cloud model of the target object using the connected camera. Please follow the instructions in Generate Point Cloud Model of using a real camera.
In the Model Files List, select the pick point generated in step 7 and drag it onto the point cloud model to associate the pick point with the model.
Successfully associated pick point will be nested below the point cloud model.