Matching Model and Pick Point Editor¶
Location:
Hint
Matching Model and Pick Point Editor requires data and configurations of a Mech-Vision project to run. Therefore, please open the project for which you need to use Matching Model and Pick Point Editor first.
Matching Model and Pick Point Editor is often used in projects that require recognition of workpieces, such as machine tending. You can use Matching Model And Pick Point Editor to create point cloud models of the target objects, edit these models, and add pick points.
- Point cloud model:
A point cloud of the target object, used as a model for matching. Mech-Vision compares the point clouds generated during project execution with this model to generate actual picking poses for the robot.
User Interface¶
The user interface of Matching Model and Pick Point Editor, as shown below, can be divided into four parts:
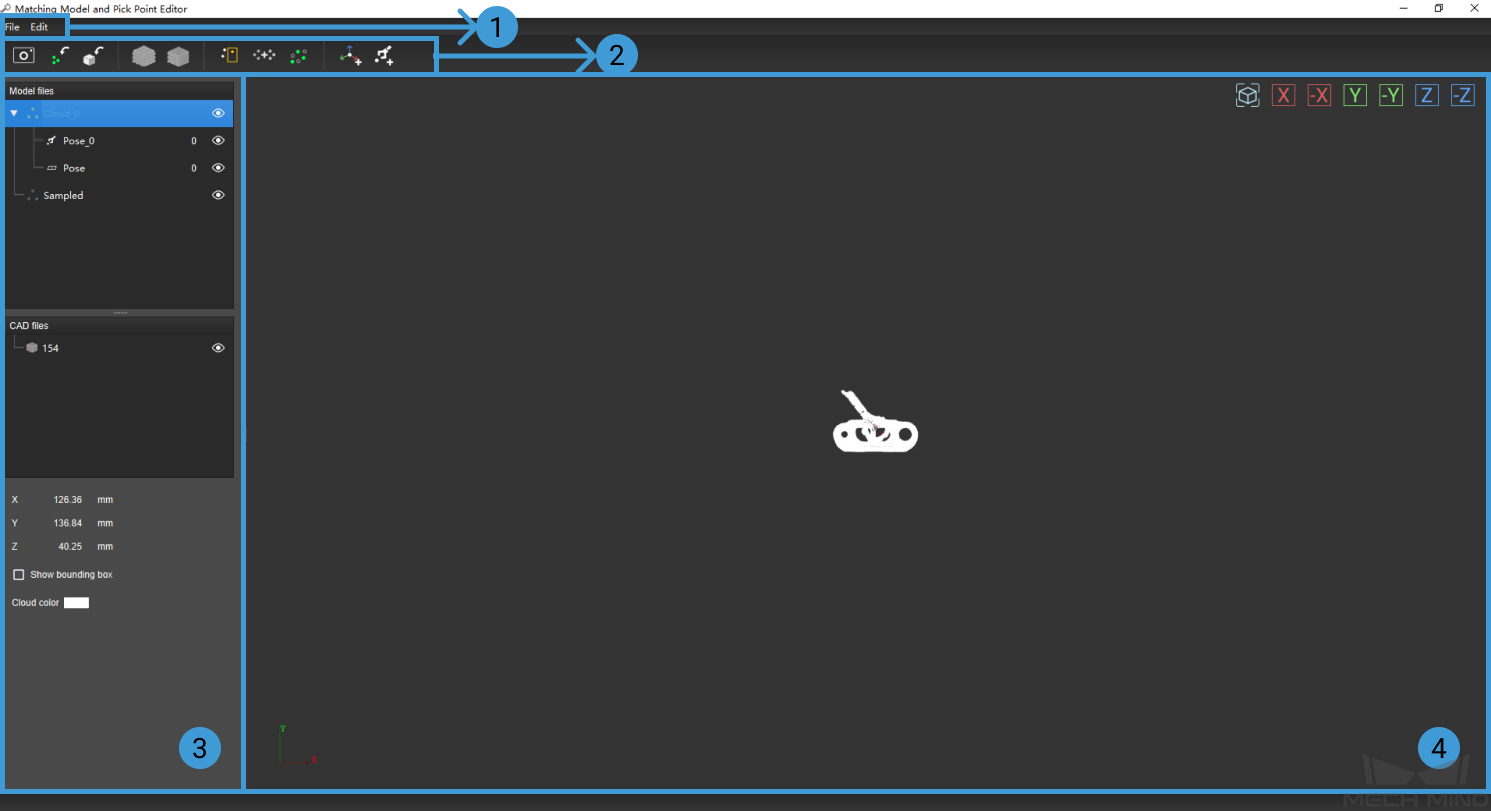
1. Menu Bar: including the File and Edit menus for saving, undoing, redoing, etc.
File Menu
Option |
Description |
Shortcut |
Save |
Save all files in the Lists to Project Folder/resource/model_editor |
Ctrl+S |
Exit |
Exit Matching Model and Pick Point Editor |
None |
Edit Menu
Option |
Description |
Shortcut |
Remove selected points |
Delete the selected points from the point cloud |
Del |
Undo |
Undo point deletion |
Ctrl+Z |
Redo |
Redo point deletion |
Ctrl+Y |
Display Settings |
Adjust the size of points, font size of pose label, pick point size, size of drag handles, and types of handles displayed |
None |
2. Toolbar: including buttons used in point cloud model generation, point cloud model editing, and pick point addition.
Only brief descriptions of each button is provided here. For detailed instructions of how to use these buttons, please refer to the chapters linked in General Workflow below.
Button |
Description |
|
Generate a point cloud model from image acquired by the camera |
|
Import an existing point cloud file in PLY format |
|
Import a CAD model file in STL format |
|
Generate a point cloud of the CAD model’s surface |
|
Generate a point cloud of only the part visible in the current view of the CAD model’s surface |
|
Select points in the point cloud |
|
Merge point clouds |
|
Downsample a point cloud |
|
Add a pick point |
|
Add a pick point by teaching |










3. Left side panel: including the Model Files List, CAD Files List, and the Parameters and Display pane.
Model Files List
All point cloud model files, pick point files, and geometric center files saved under Project Folder/resource/model_editor/matching_source are listed here.
Mouse action |
Function |
Click on |
Hide this file in the Visualizing Space. Clicking again makes the file visible. |
Double-click a file name |
Rename the file |
Drag |
|
Right-click on a point cloud model |
Can copy or delete this model |
Right-click on a pick point/geometric center |
Can copy, delete, or set this point as geometric center and/or pick point |
Hint
If a point cloud model only has one pick point, then the “Set as geo. center” option in the right-click menu of this pick point cannot be unchecked.
CAD Files List
All CAD model files saved under Project Folder/resource/model_editor/cad_files are listed here.
Similar to the Model Files List, clicking on the
 next to a file name hides the file in the Visualizing Space. Clicking again makes the file visible.
next to a file name hides the file in the Visualizing Space. Clicking again makes the file visible.Right-clicking on a file name gives the option to remove the file from the List, but this will not delete the CAD file save in the above directory.
Parameters and Display Pane
The Parameters and Display pane is the region below the CAD Files List. When you select a point cloud model, a pick point/geometric center, or a CAD file, this Pane will display the functions corresponding to the type of file.
When a point cloud model is selected: this pane displays the dimensions of the model’s bounding box, and the Show bounding box and Cloud color options.
Check Show bounding box to show the bounding box of the selected point cloud model.
Double-click on the white rectangle next to Cloud color to change the display color of the point cloud model.
Hint
The display color of an imported color point cloud cannot be changed.
When a CAD file is selected: this pane displays the dimensions of the CAD model’s bounding box, and the Show bounding box option.
Check Show bounding box to show the bounding box of the selected CAD model.
When a pick point/geometric center is selected: this pane displays the Pose Editing Widget. For detailed description, please refer to Pose Editing Widget.
4. Visualizing Space: displaying the point cloud models and CAD files opened in Matching Model and Pick Point Editor, view adjustable.
You can adjust your view through the following mouse actions.
Mouse action |
Function |
Left-button drag |
Rotate the view |
Right-button drag or scroll |
Zoom |
Drag with the scroll wheel |
pan the view |
You can also use the buttons in the upper right of the Visualizing Space to achieve the following view adjustments.
Button |
Description |
|
Zoom to fit, and center the selected file in the Visualizing Space |
|
View along the positive X-axis |
|
View along the negative X-axis |
|
View along the positive Y-axis |
|
View along the negative Y-axis |
|
View along the positive Z-axis |
|
View along the negative Z-axis |







General Workflows¶
Depending on the method for adding pick point, there are two workflows for using Matching Model and Pick Point Editor:
Obtain pick point by moving the robot with the teach pendant: obtain the pick point first, and then generate the point cloud model, and edit the model last.
Add pick point directly in Matching Model and Pick Point Editor: generate the point cloud model first, and then edit the model, and add the pick point last.
The following chapters provide detailed instructions for each process:
Relevant Steps¶
Some Steps need the files created in Matching Model and Pick Point Editor to run. You can create point cloud model files, pick point files, and geometric center files in Matching Model and Pick Point Editor.
Steps that require point cloud model file(s) and pick point file(s): 3D Coarse Matching, 3D Coarse Matching (Multiple models), 3D Fine Matching, and 3D Fine Matching (Multiple Models).
Step that requires a pick point file and a geometric center file: Map to Multi Pick Points.