3D Fine Matching (Multiple Models)¶
Function
Use multiple models to accurately match objects in the scene, and output accurate pick points of the target objects.
Sample Scenario
This Step performs more accurate matching based on the initial candidate poses output by the Step 3D Coarse Matching (Multiple models) and outputs accurate poses of the target object.
Input and Output
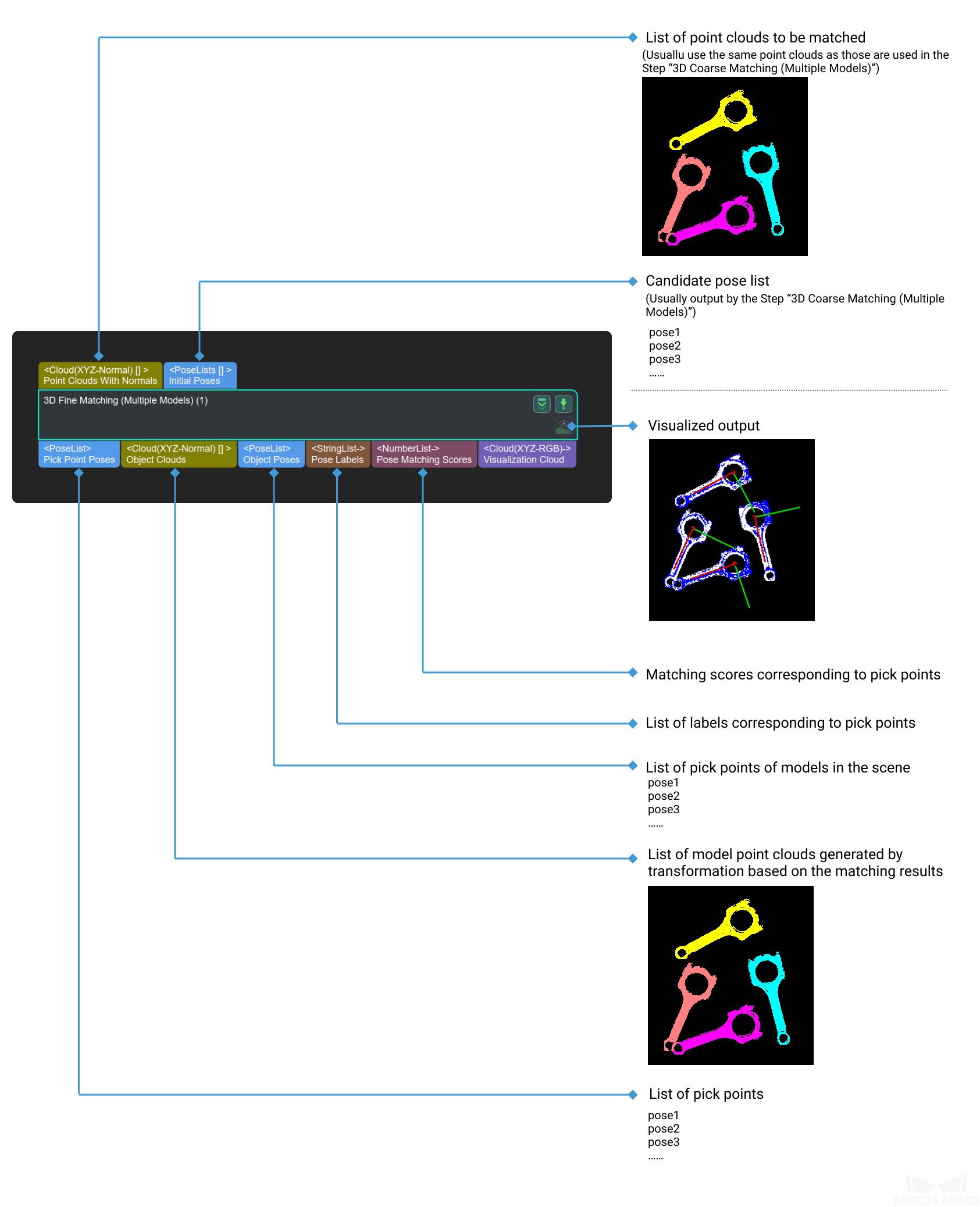
Parameters
Basic Mode
This chapter introduces the adjustable parameters in Basic Mode. These parameters can also be configured in Advanced Mode.
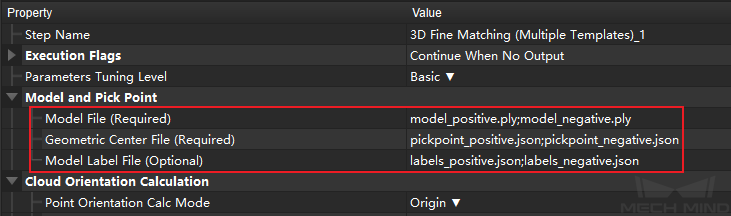
Model and Pick Point
The path of model file and pick point file.
- Model File
- Geometric Center File
- Model Label File
Cloud Orientation Calculation
- Point Orientation Calc Mode
Origin: Directly use the original normal direction of the input point cloud;
StandardMode : Use the CPU to recalculate the normal direction of the input point cloud. It is recommended to use this mode when the model file doesn’t have normal direction: Search for the k points closest to the target point, and use PCA (Principal Component Analysis) to obtain the minimum eigenvector as the point’s normal direction.
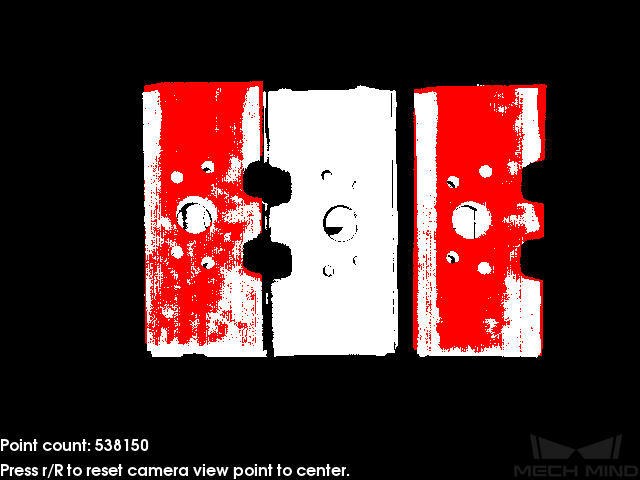
EdgeTangent : Calculate the tangent of the input edge point cloud, and use the tangent direction of the point as the normal direction. This mode can be used when matching the edge point cloud of a flat object. There are two usage scenarios as follows:
Scenario 1: Distinguish the front (positive) and back (negative) of the object. Use the 3D Fine Matching (Multiple Models) step, and the model point cloud is the positive and negative template of the object;
Scenario 2: No need to distinguish the front and back of the object. Use the 3D Fine Matching (single template) step.
EdgeNormal : Calculate the normal direction of the input edge point cloud. This mode can also be used when matching the edge point cloud of a flat object.
Note
When using EdgeTangent or EdgeNormal methods, please ensure that each edge point cloud does not contain multiple objects (each object’s point cloud has been divided already).
- Number of Searching Points
Correspondence Settings
Default Value: GMMList of Values: GMM, nearest-neighborInstruction: This parameter is used to select the local matching method to match the model point cloud with the scene point cloud. The model point cloud will move and rotate according to the set range to match the point cloud in the scene obtained in the previous step match. In most scenarios, GMM has better anti-interference ability and faster matching speed, so it is recommended to use this mode; in rare cases when GMM cannot meet the demand, the nearest point (nearest-neighbor) mode is worth to try.GMM Mode
- Matching Mode
HighSpeed: The fastest mode, but with lower precision;
Standard: A relatively stable mode;
HighPrecision: The highest precision mode, but with slower speed.
- Number of Iterations
- Standard Deviation
0.01m.- Standard Deviation Update Step Number
- Minimum Standard Deviation
- Apply Weight in Iteration
Nearest-Neighbor Mode
Iteration Settings
- Number of Iterations
- Nearest Points Search Radius
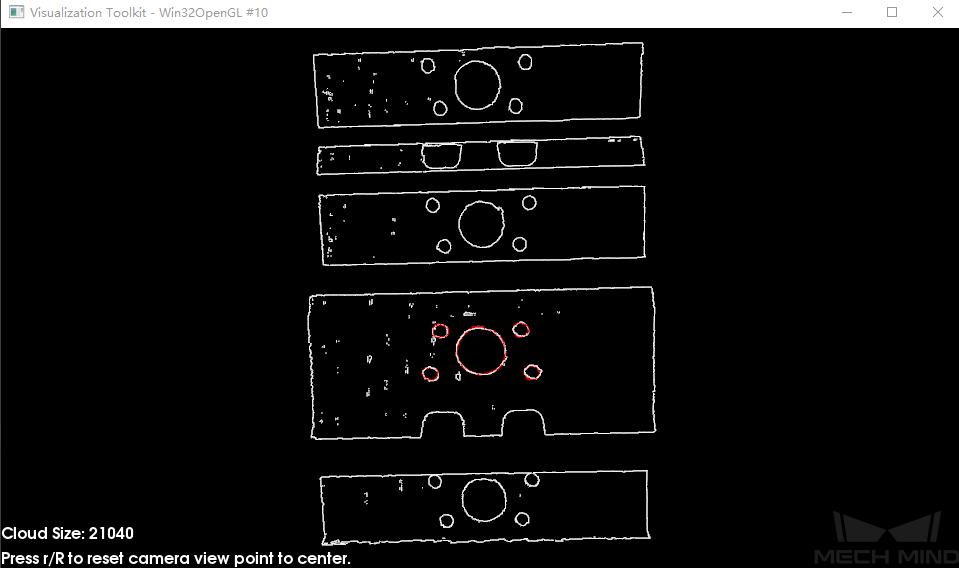
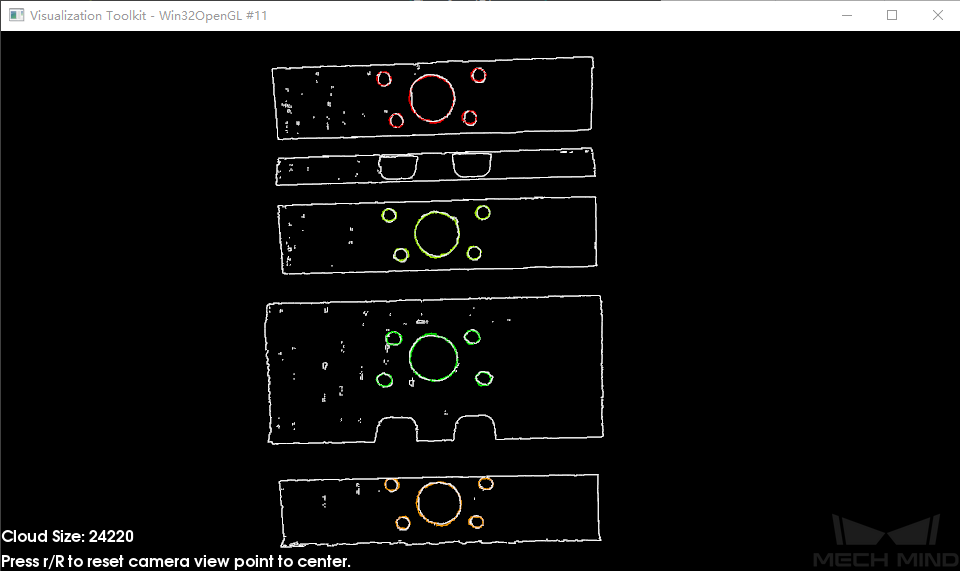
0.001. If the radius is less than this lower limit, some sparsely distributed points may not find the closest point, which could affect the output result.Example: When the initial pose deviation is very large and this parameter is set as the minimum value0.001, the matching result will be incomplete, as shown by the (b) in Figure 3; When this parameter is increased to0.01, the search radius will become larger, and a complete matching result can be obtained, as shown by (a) in Figure 3.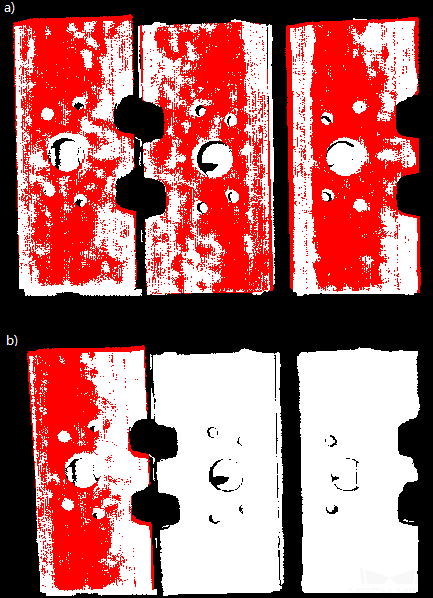
Figure 3 Comparison of Matching Results with Different Search Radius¶
- MSE Threshold
- Window Size
- Show Correspondence
- Complex Object
- Automatic Weight
Point Pair Rejection
- Reject Pair
- N Sigma Threshold
- Point Pair Angle Diff Thre
- Apply Weights on Pairs
- Remove Repeat Correspond
- Remove Repeat Correspond Type
MinDis : Calculate the distance between the repetitive point pairs. Then, keep the point pair with the smallest distance, and delete the remaining repetitive point pairs. More repeating corresponding point pairs will be eliminated in this method than the other;
GlobalMin : Take the average value of the distance between the repetitive point pairs as a reference to find out the point pair whose distance is closest to the average value. Then, retain this point pair and eliminate others. Less repeating corresponding point pairs will be eliminated in this method than the other.
Sampling Settings
- Sampling Interval
0.005and0.025, respectively. The white one is the input scene point cloud. It can be seen from the comparison of the two pictures that the smaller the sampling interval (Figure 4), the more accurate the output result will be.- Search Points Number
Advanced, this parameter can be adjusted. This parameter is reserved for compatibility with old versions and is used to adjust the number of search points in the sampling process.Validation Settings
- Confidence Threshold
- Result evaluation search radius
Output Settings
- Maximum Number of Detected Poses in Each Point
Results Visualization
- Show Matching Results
Advanced Mode
This chapter only introduces the parameters that Basic Mode does not contain. If there are some parameters that are the same as that in the Basic Mode, please refer to Basic Mode.
Symmetry Settings
- Symmetry Axis
- Angle Step
- Min Rotation Angle
- Max Rotation Angle
Model Weight in Validation
- File of Model Fragments with High Weight
- Weight of Each Point
1, after setting this parameter for the target point cloud, the weight coefficient of the target point cloud will become [1*this parameter], so as to achieve the purpose of emphasis in the subsequent matching steps.- Search Radius When Set Weight
Validation Settings
- Apply Angle Deviation in Validation
- Multiply Corresponding Points Ratio in Scene
Accleration Settings
- Accleration with GPU
Result Visualization
- Show Sampled Model Cloud
- Show Sampled Scene Cloud
- Show Validation Point Correspondences