3D Matching¶
The main function of 3D matching is to detect objects in the scene and obtain their poses by point cloud template matching. This step usually follows the step Filter Out Point Clouds That Exceed The Limit. The combination is as Figure 1. shown.
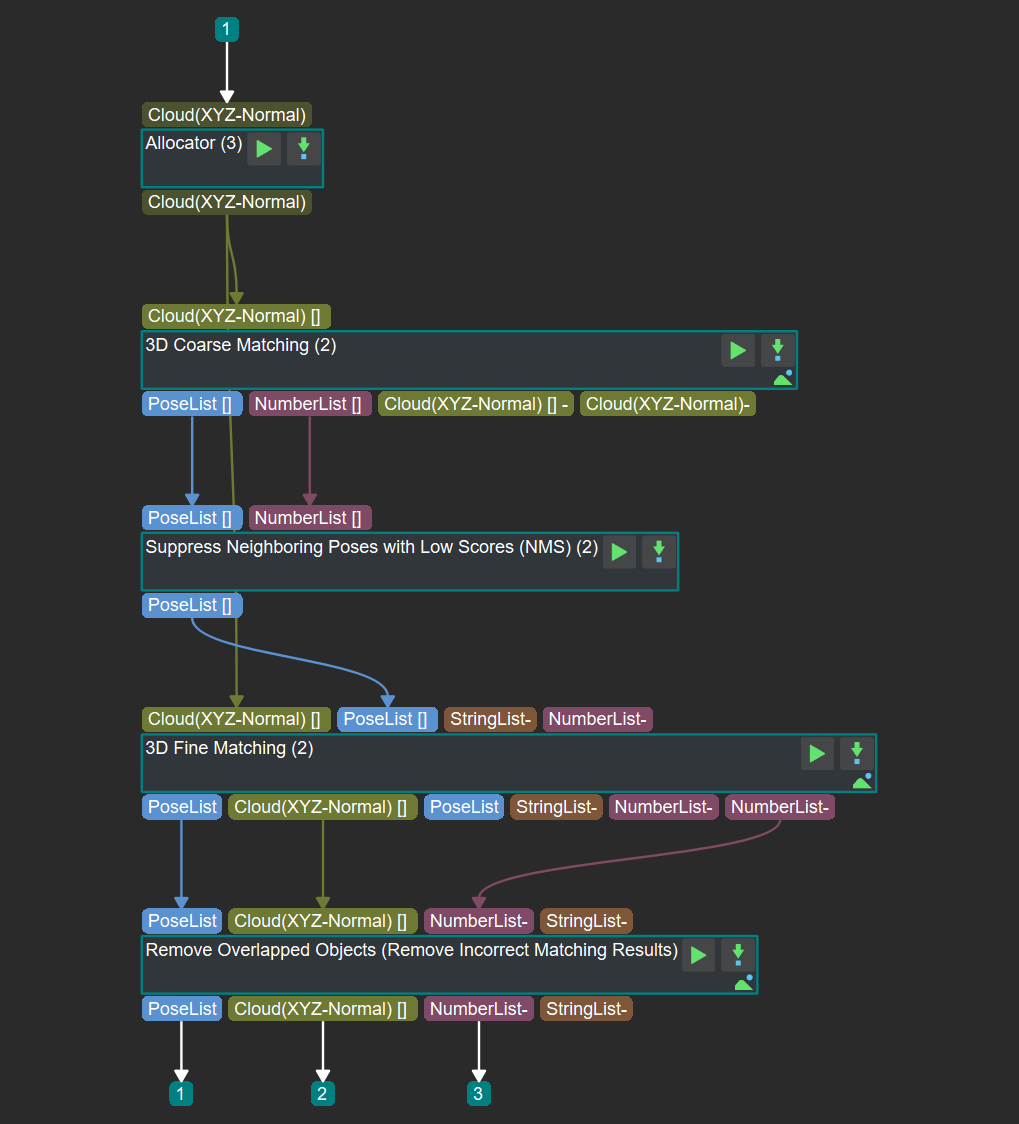
Figure 1. Procedure of 3D matching¶
Firstly, input the filtered point cloud into this combination, then users would get one or multiple initial poses by 3D Coarse Matching. Then these poses are processed and the most reasonable one is selected using Suppress Neighboring Poses with Low Scores (NMS). Finally, users could obtain the accurate pose by processing the filtered pose and point cloud with 3D Fine Matching.
After selecting the object pose in horizontal direction, then Remove Overlapped Objects follows, which remove overlapping objects in the Z direction. Finally, the pose suitable for grabbing on the upper layer is selected.