Transform Poses¶
Function
This Step can transform poses from one reference frame to another, or transform within its own reference frame according to the reference pose.
Sample Scenario
This Step is usually used to transform poses between camera reference frame and robot reference frame.
Input and Output
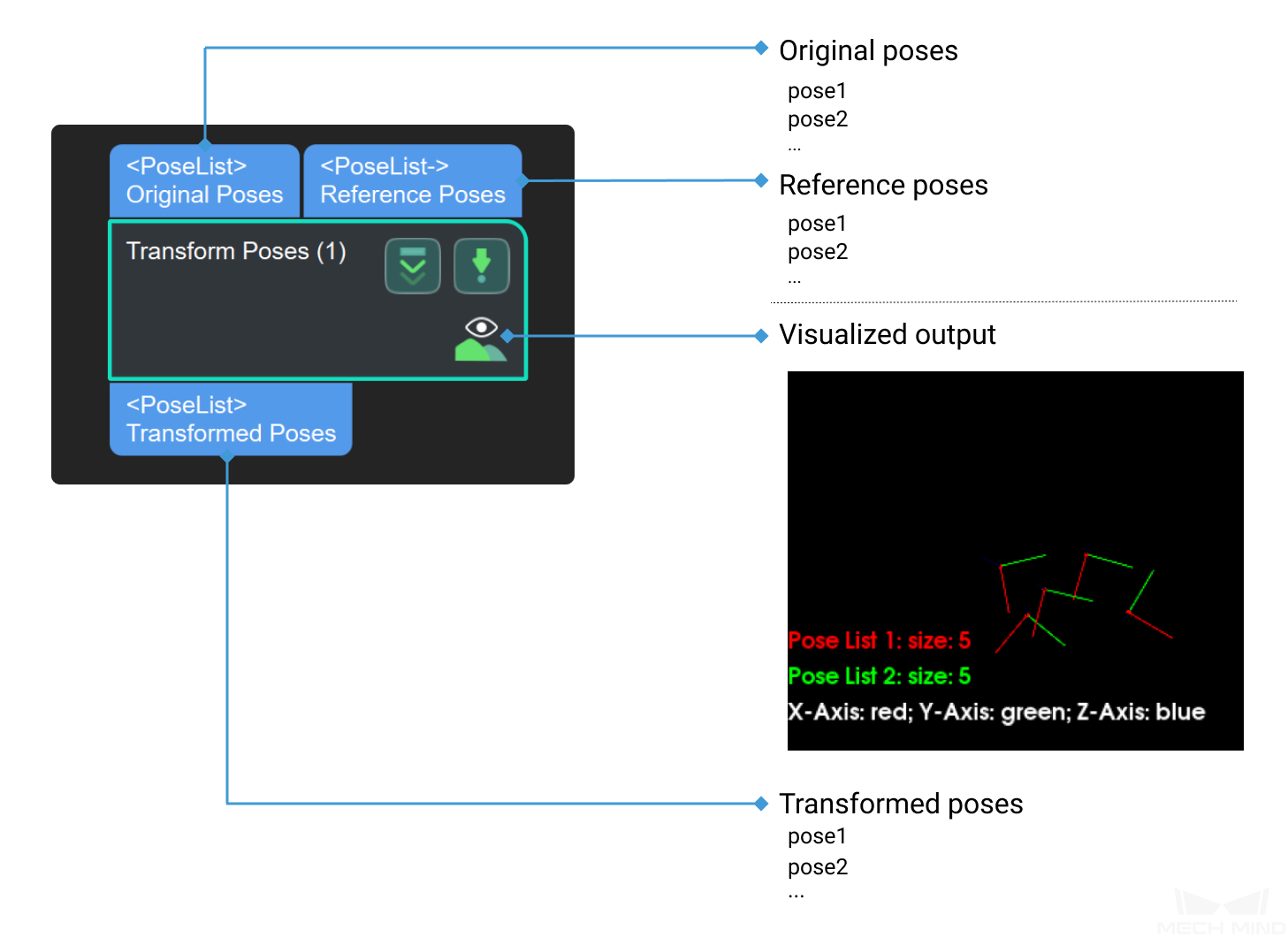
Parameters
type
transformType
Default Value: CameraToRobot (Camera coordinate System to robot Coordinate System)List of Values: CameraToRobot, RobotToCamera, AllWithFirst, FirstWithAll, UseCorrespondenceInput.Instruction: “CameraToRobot” means that transforming the pose in camera coordinate system to robot coordinate system while “RobotToCamera” works for inverse transformation. “AllWithFirst” is using the first input reference pose and “FirstWithAll” is using all reference poses to transform the first input pose. “UseCorrespondenceInput” is the one-to-one transformation between the input pose and the reference pose. When selecting the last three, the second input should exist.re should exist moreover for “UseCorrespondenceInput”, the number of input pose and the reference pose should be equal.