Transform Point Clouds¶
Function
This Step can transform point clouds from one reference frame to another, or transform within its own reference frame according to the reference pose.
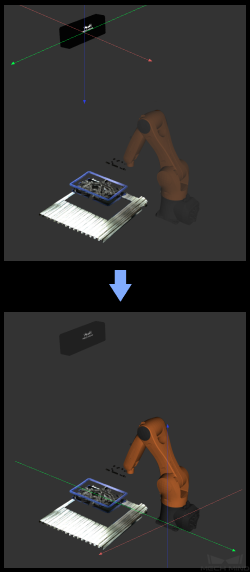
Sample Scenario
This Step is usually used to transform point clouds between camera reference frame and robot reference frame.
Input and Output
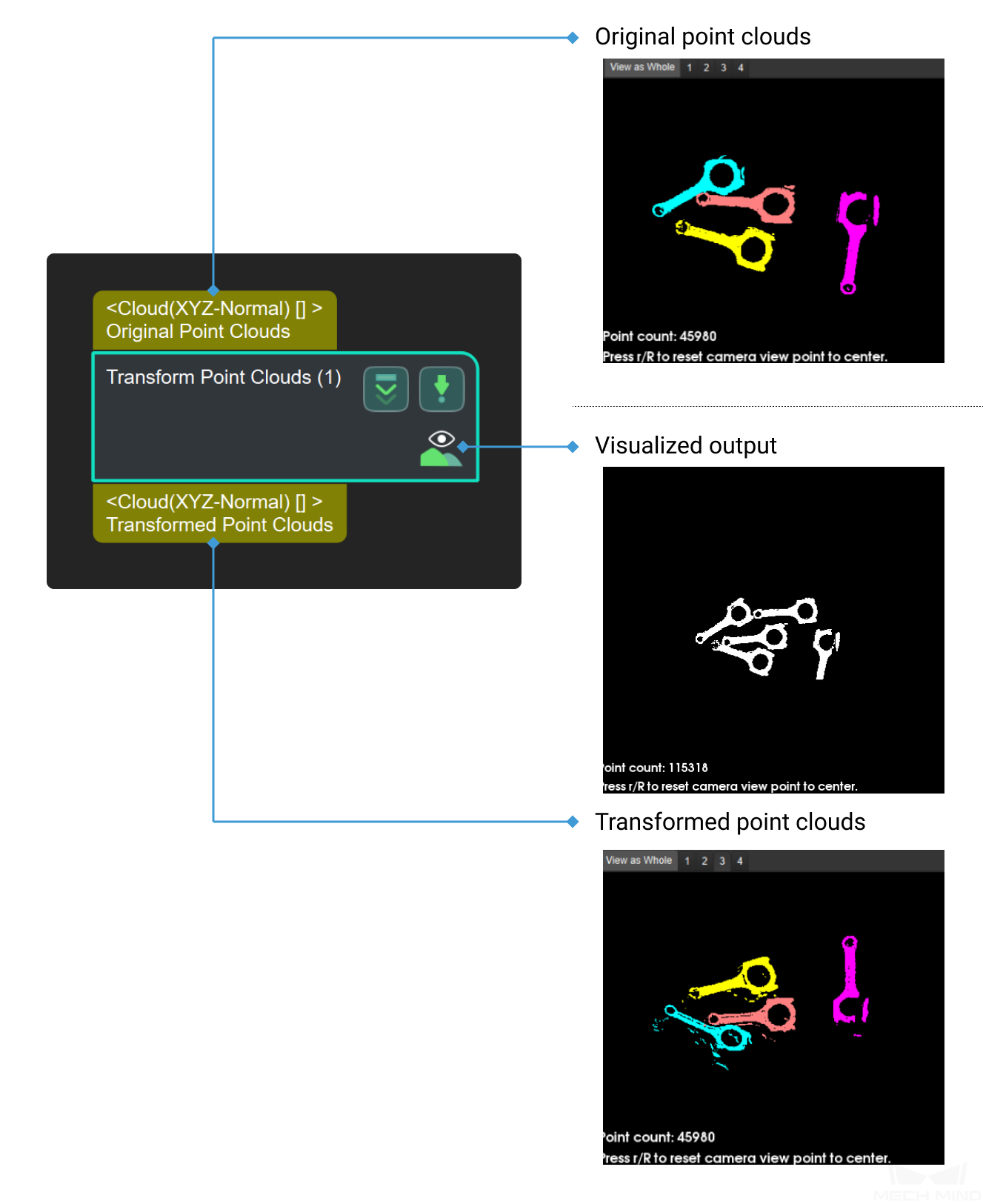
Parameters
CameraToRobot: transform point clouds from camera reference frame to robot reference frame.
RobotToCamera: transform point clouds from robot reference frame to camera reference frame.
AllWithFrst: transform all point clouds to the reference frame of the first reference pose.
FirstWithAll: transform the first point cloud to the reference frame of reference pose.
UseCorrespondenceInput: transform all point clouds to the reference frame of the corresponding reference pose respectively.