솔루션 설계
이 섹션에서는 고정자 솔루션의 설계 개요를 소개하며, 비전 시스템의 실행 워크플로, 소프트웨어 조합, 카메라 모델 성택, 캘리브레이션 보드 선택, IPC 및 로봇 모델 선택, 그리고 워크스테이션 및 그리퍼 설계 등의 내용을 포함합니다.

소프트웨어 조합
이 솔루션은 Mech-Vision를 사용하여 고정자의 포즈를 인식하고 고정자를 피킹하는 경로를 계획합니다.
아래 그림과 같이, Mech-Vision는 포즈를 기반으로 로봇의 피킹 경로를 계획하고, 표준 인터페이스 통신을 통해 로봇이나 PLC 등의 외부 장치로 해당 경로를 반환합니다.

카메라 모델 선택 및 설치 높이 결정
고정자 로딩 프로젝트에서는 카메라 시야, 정밀도, 작업 거리에 따라 Mech-Eye LSR L-GL산업용 3D 카메라(LSR L-GL 카메라라고 함)를 사용하는 것을 추천합니다. 이 카메라는 높은 정밀도, 빠른 속도를 갖추고 있으며, 환경광 내성이 뛰어납니다. 이 카메라의 자세한 기술 사양은 LSR L-GL기술 사양을 참조하세요. 다른 카메라 모델을 사용해야 하는 경우 3D 카메라 선택 도구를 사용하여 적절한 모델을 선택하세요.
카메라 모델을 선택한 후 3D 카메라 선택 도구를 사용하여 카메라의 설치 높이를 결정하세요. 구체적인 프로세스는 다음과 같습니다.
-
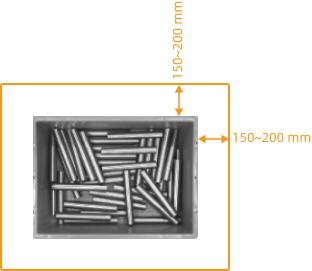
대상 물체 최상단 레이어의 치수를 확인하고, 가능한 최대 높이를 결정한 후 물체 크기 패널에 길이(mm), 너비(mm) 및 높이(mm) 값을 입력합니다.
아래 그림과 같이, 들어오는 물체 위치의 편차를 수용하기 위해 물체의 최상층 주변의 각 모서리에 150~200mm의 여백을 남겨두어야 합니다. 즉, 입력하는 길이 및 높이 값은 물체 최상단 치수에 아래 그림에 표시된 여유 값을 더한 값이어야 합니다.
-
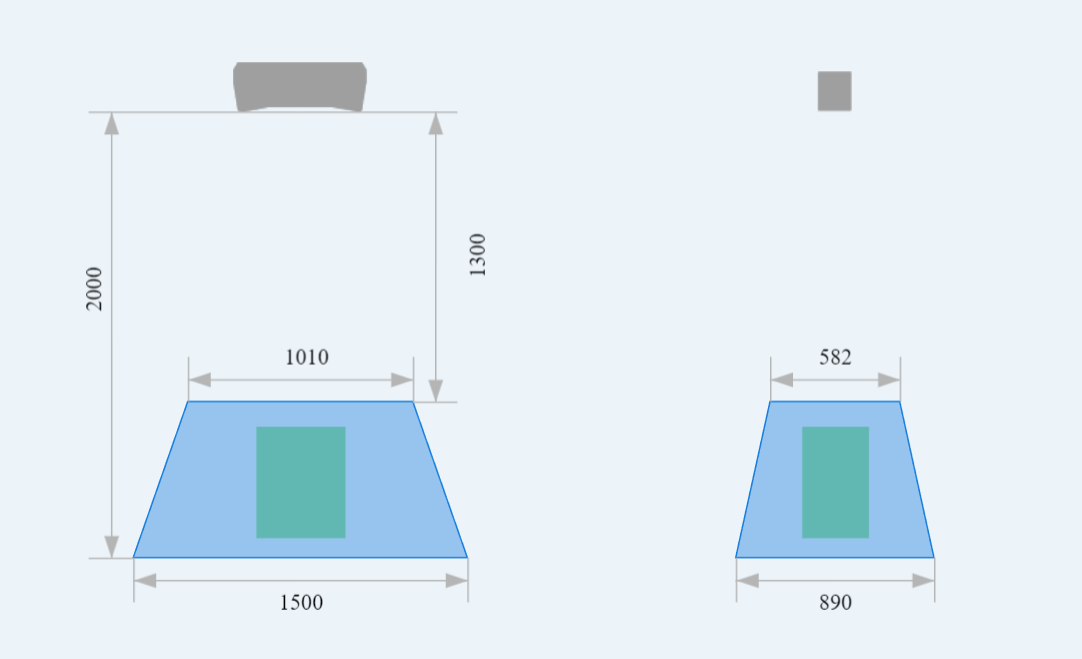
카메라로부터 물체 표면까지의 거리 오른쪽에 있는 스위치를 켜고 해당 값을 반복해서 조정하여 오른쪽 물체를 나타내는 블록이 카메라 시야의 중심에 위치하고 전체가 시야에 포함되도록 합니다. 이때, 블록이 녹색으로 표시되어야 합니다.
-
카메라 설치 높이 = 카메라로부터 물체 표면까지의 거리 + 물체 높이.
데이터의 좋은 품질을 보장하려면 시야와 로봇의 작업 공간에 대한 요구 사항을 충족하는 동시에 카메라와 대상 물체 최상층 사이의 거리가 추천 작업 거리 범위 내에 있는지 확인하십시오.
IPC 선택
Mech-Mind IPC STD 모델을 사용하는 것이 권장됩니다. 이 모델은 일반적인 디팔레타이징 및 로드&언로드 시나리오에 적합합니다.
로봇 모델 선택
고정자 솔루션에서는 피킹 범위와 정밀도 요구에 따라, ABB_IRB_6700_150_3_20과 같은 피킹 범위가 넓고 정밀도가 높은 6축 로봇을 선택해야 합니다. 본 솔루션에서는 해당 로봇을 예시로 사용합니다.
다른 브랜드의 로봇을 선택하는 경우 로봇 모델 선택 내용을 참조하십시오.
워크스테이션 배열 방식 설계
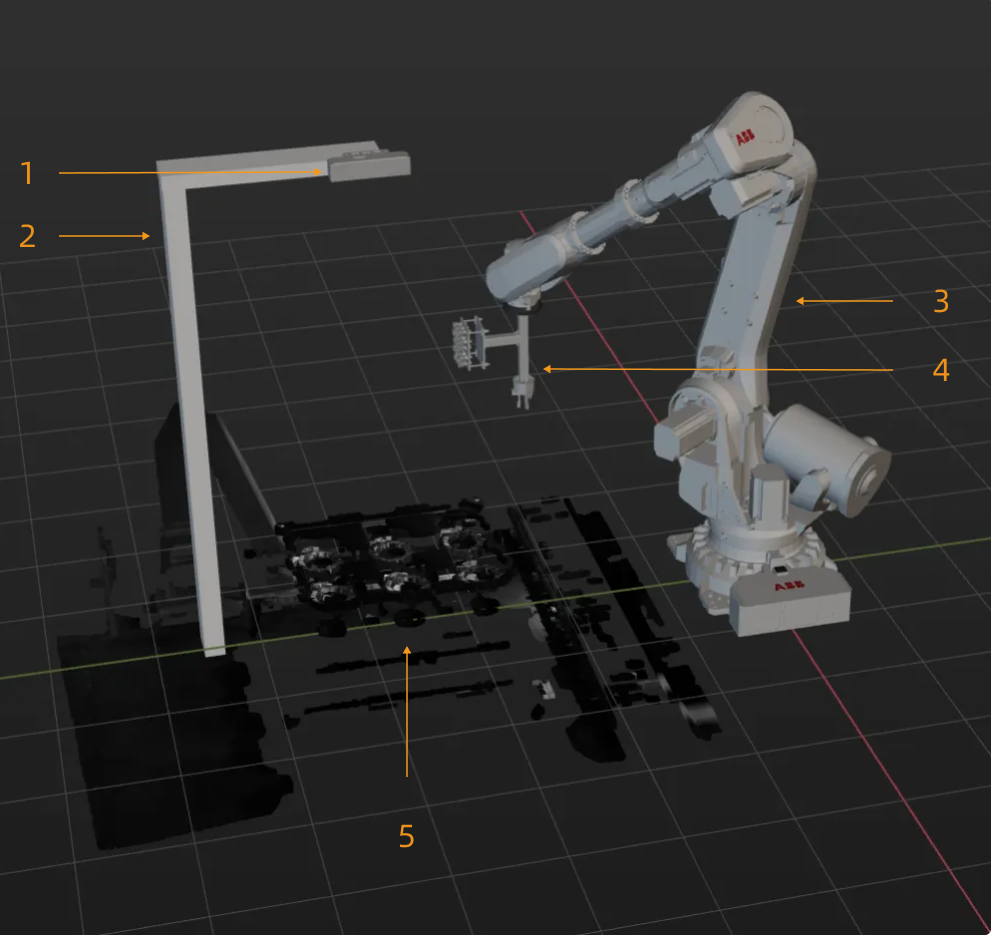
현장 워크스테이션 배열 방식은 아래 그림과 같습니다. LSR L-GL 카메라는 트레이 위 2m 높이에 설치됩니다. 카메라가 이미지를 컵처한 후 모든 대상 물체의 포인트 클라우드 데이터를 얻을 수 있습니다. 그림의 각 구성 요소는 다음과 같습니다: 1-LSR L-GL 카메라; 2-카메라 마운팅 브래킷; 3-로봇; 4-그리퍼; 5-인피드 트레이.
그리퍼 설계
본 솔루션은 3 핑거 내부형 그리퍼를 사용하여 고정자를 피킹합니다. 이 그리퍼는 대상 물체 표면에 그리퍼 핑거가 삽입될 수 있는 홈이나 관통공이 있는 경우에 적합합니다. 그 설계는 아래 그림과 같다: 1-마운팅 플랜지; 2-3 핑거 실린더; 3-내부형 그리퍼 4-핑거 슬리브; 5-파티션을 피킹하는 그리퍼.
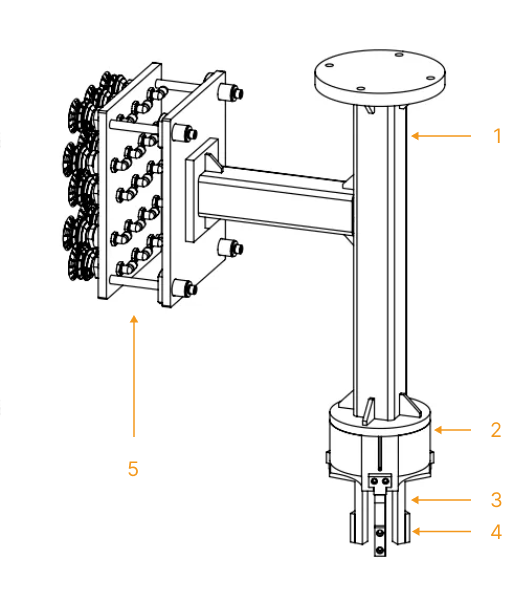
| 이 솔루션에서는 트레이에 다층 대상 물체가 적재되어 있으며, 중간에 파티션으로 분리되어 있기 때문에, 그리퍼에는 파티션을 피킹하기 위한 부품이 포함되어야 합니다. 로봇은 먼저 최상단의 대상 물체를 피킹하며, 최상단 대상 물체의 피킹가 완료된 후에는 파티션을 먼저 피킹한 다음, 그 아래 층의 대상 물체를킹 피킹해야 한다. 현장에서 파티션을 사용하지 않는 경우, 그리퍼 설계 시 해당 부분은 생략할 수 있습니다. |