솔루션 설계
이 섹션에서는 사각형 강철 빌릿의 설계 개요를 설명합니다. 내용에는 비전 시스템의 워크플로, 소프트웨어 조합, 카메라 모델 선택, 캘리브레이션 보드 선택 등이 포함됩니다.

소프트웨어 조합
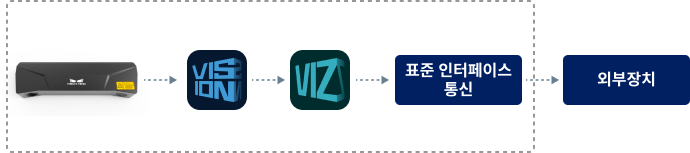
이 솔루션은 Mech-Vision를 사용하여 사각형 강철 빌릿의 포즈를 인식하고 Mech-Viz를 사용하여 사각형 강철 빌릿을 피킹하는 경로를 계획합니다.
아래 그림과 같이, Mech-Viz는 포즈를 기반으로 로봇의 피킹 경로를 계획하고, 표준 인터페이스 통신을 통해 로봇이나 PLC 등의 외부 장치로 해당 경로를 반환합니다.
카메라 모델 선택 및 설치 높이 결정
무작위 배치된 사각형 강철 빌릿 로딩 프로젝트에서는 카메라 시야, 정밀도, 작업 거리에 따라 Mech-Eye LSR L-GL산업용 3D 카메라(LSR L-GL 카메라라고 함)를 사용하는 것을 추천합니다. 이 카메라는 높은 정밀도, 빠른 속도를 갖추고 있으며, 환경광 내성이 뛰어납니다. 이 카메라의 자세한 기술 사양은 LSR L-GL기술 사양을 참조하세요. 다른 카메라 모델을 사용해야 하는 경우 3D 카메라 선택 도구를 사용하여 적절한 모델을 선택하세요.
카메라 모델을 선택한 후 3D 카메라 선택 도구를 사용하여 카메라의 설치 높이를 결정하세요. 구체적인 프로세스는 다음과 같습니다.
-
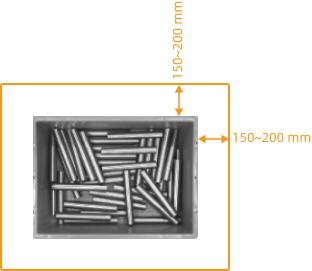
대상 물체 최상단 레이어의 치수를 확인하고, 가능한 최대 높이를 결정한 후 물체 크기 패널에 길이(mm), 너비(mm) 및 높이(mm) 값을 입력합니다.
아래 그림과 같이, 들어오는 물체 위치의 편차를 수용하기 위해 물체의 최상층 주변의 각 모서리에 150~200mm의 여백을 남겨두어야 합니다. 즉, 입력하는 길이 및 높이 값은 물체 최상단 치수에 아래 그림에 표시된 여유 값을 더한 값이어야 합니다.
-
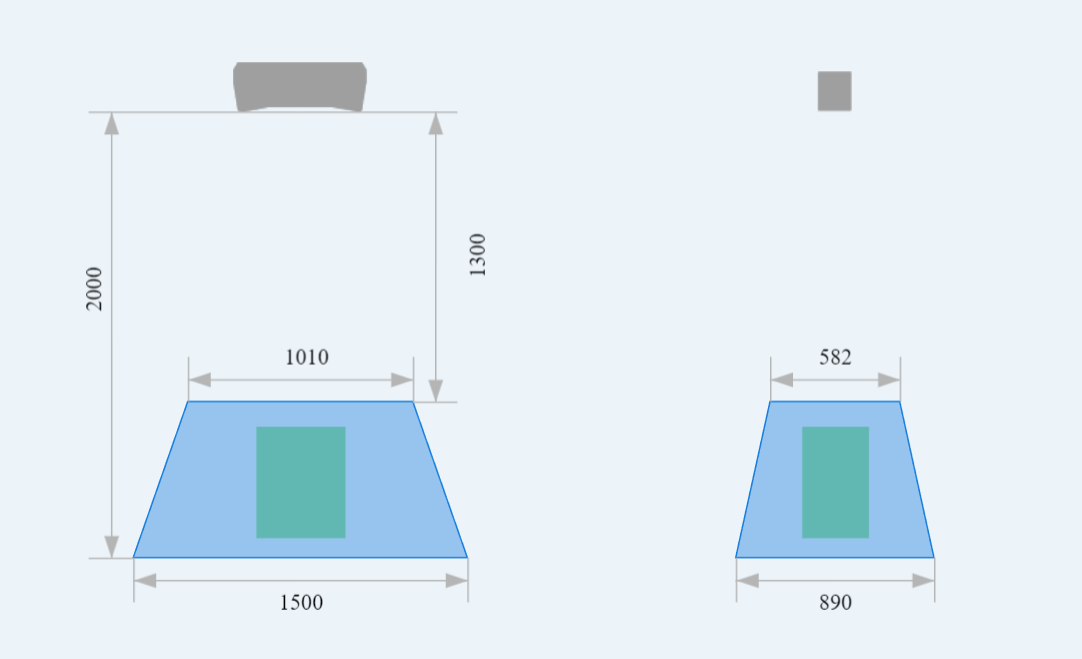
카메라로부터 물체 표면까지의 거리 오른쪽에 있는 스위치를 켜고 해당 값을 반복해서 조정하여 오른쪽 물체를 나타내는 블록이 카메라 시야의 중심에 위치하고 전체가 시야에 포함되도록 합니다. 이때, 블록이 녹색으로 표시되어야 합니다.
-
카메라 설치 높이 = 카메라로부터 물체 표면까지의 거리 + 물체 높이.
데이터의 좋은 품질을 보장하려면 시야와 로봇의 작업 공간에 대한 요구 사항을 충족하는 동시에 카메라와 대상 물체 최상층 사이의 거리가 추천 작업 거리 범위 내에 있는지 확인하십시오.
IPC 선택
Mech-Mind IPC STD 모델을 사용하는 것이 권장됩니다. 이 모델은 일반적인 디팔레타이징 및 로드&언로드 시나리오에 적합합니다.
로봇 모델 선택
사각형 강철 빌렛 솔루션에서는 피킹 범위와 정밀도 요구 사항에 따라 KAWASAKI_RS010N과 같은 소하중 고정밀 6축 로봇을 선택해야 합니다. 이 튜토리얼에서는 이 로봇을 예로 들어보겠습니다.
다른 브랜드의 로봇을 선택하는 경우 로봇 모델 선택 내용을 참조하십시오.
워크스테이션 배열 방식 설계
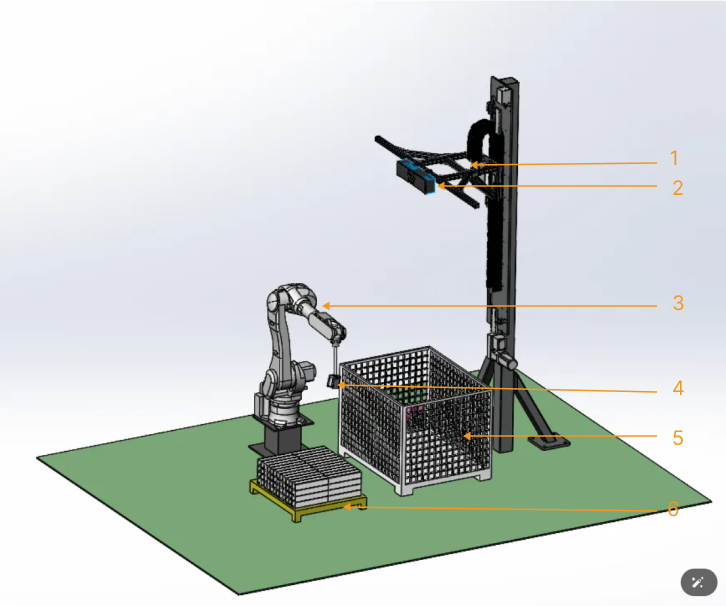
현장 워크스테이션 배열 방식은 아래 그림과 같습니다. LSR L-GL 카메라는 빈 위 2m 높이에 설치됩니다. 카메라가 이미지를 컵처한 후, 빈과 그 안에 있는 모든 대상 물체의 포인트 클라우드 데이터를 얻을 수 있습니다. 그림의 각 구성 요소는 다음과 같습니다: 1-카메라 마운팅 브래킷; 2-LSR L-GL 카메라; 3-로봇; 4-그리퍼; 5-인피드 빈; 6-파렛트.
그리퍼 설계
이 솔루션에서는 공압식 제어 마그네틱 그리퍼 옵셋을 사용하여 대상 물체를 피킹합니다. 여기를 클릭하여 그리퍼 모델을 다운로드하십시오.
해당 그리퍼의 설계는 아래 그림과 같으며, 각 구성 요소는 다음과 같습니다: 1-연결 로드; 2-버퍼링 메커니즘; 3-공압식 영구자석; 4-마그네틱 흡착면.
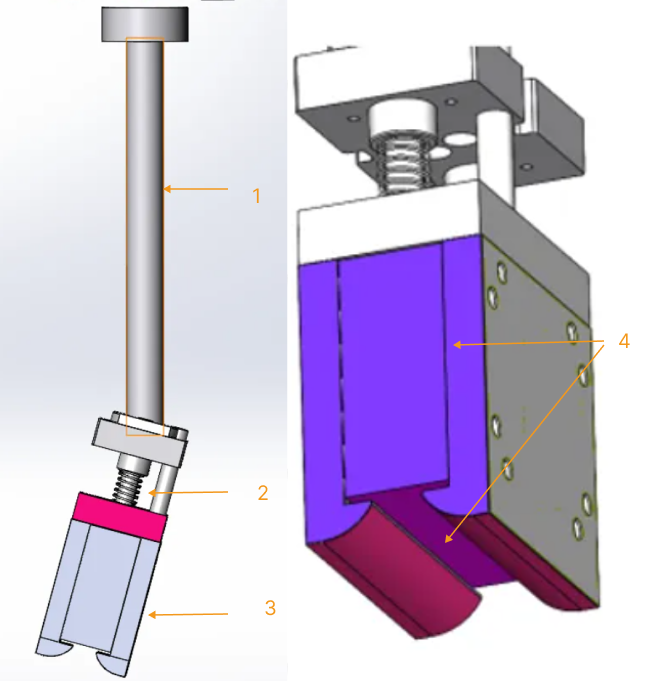
| 위 그림에 표시된 그리퍼에서 색상으로 표시된 그리퍼 단면은 모두 마그네틱 흡착면이며, 이를 통해 대상 물체를 흡착할 수 있습니다. |