솔루션 배포 일반적인 문제
이 부분에서는 깊은 빈 내의 작은 금속 부품 솔루션의 일반적인 문제, 가능한 원인 및 해결 방법에 대해 설명합니다.
문제1: 경로 계획 소요 시간 비교적 김
원인 추측
-
Mech-Vision에서 출력된 포즈 순서가 비합리적으로 설정되어 있어, 이로 인해 Mech-Viz의 경로 계획 실패 횟수가 많아집니다.
-
Mech-Viz 프로젝트 파라미터 설정에 문제가 있습니다.
-
Mech-Viz로 경로를 계획하는 과정에서 불필요한 대칭성 시도가 반복적으로 이루어졌습니다.
솔루션
-
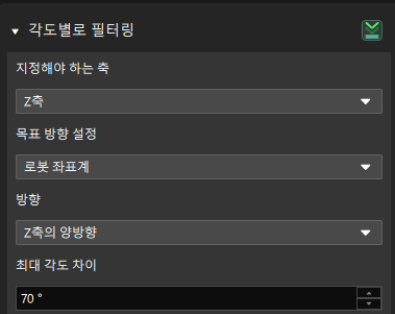
포즈 조정 도구를 사용하여 포즈를 필터링합니다. 예를 들어 각도별로 필터링 방식을 통해 피킹 각도가 명백히 부적절한 포즈를 제거할 수 있습니다.
-
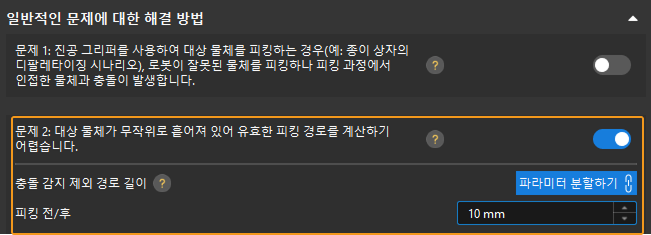
Mech-Viz에서 시간이 많이 소요되며 불필요한 기능을 비활성화합니다. 예를 들어, 충돌 감지 탭의일반적인 문제에 대한 해결 방법에서 문제 1 스위치를 끄고, 대상 물체의 포인트 클라우드는 제거하지 않습니다.

-
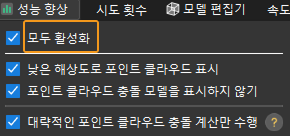
Mech-Viz툴 바의 성능 향상 옵션은 활성화한지 확인합니다.
-
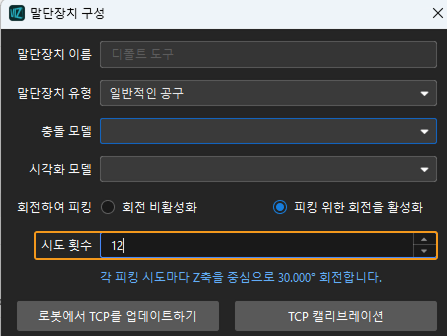
말단장치를 구성할 때 실제 상황에 맞게 대칭 횟수 값을 설정하여 불필요한 피킹 시도를 줄이세요.
문제2: 경로 계획 실패
원인 추측
-
Mech-Vision에서 출력된 대상 물체 포즈가 비합리적이며 로봇의 가용 작업 범위를 초과합니다.
-
Mech-Viz의 웨이포인트 설정에 문제가 있어 로봇이 경로를 따라 이동할 때 시나리오 물체와 충돌하게 됩니다.
-
그리퍼를 사용하여 대상 물체를 피킹하는 경우 그리퍼가 대상 물체 표면의 포인트 클라우드와 충돌하고 충돌 부피가 충돌 감지 임계값을 초과합니다.
솔루션
-
Mech-Vision 출력된 대상 물체 포즈가 올바른지 확인합니다.
-
실제 상황에 맞게 Mech-Viz에 적절한 중간점을 추가합니다.
-
그리퍼가 대상 물체를 피킹할 때 충돌이 허용되는지 고려하세요.
-
충돌이 허용되면 충돌 감지 탭의 일반적인 문제에 대한 해결 방법에서 문제2의 스위치를 켜고 픽 포인트 근처에서 포인트 클라우드 충돌을 감지하지 말고 충돌 감지 제외 경로 길이를 설정합니다.
-
충돌이 허용되지 않는 경우 충돌 감지 임계값이 너무 작은지 확인하세요. 파라미터 값이 적절하더라도 대상 물체가 그리퍼와 충돌하는 경우 다른 피킹 전략을 사용하는 것을 고려하세요.
-
문제3: 포인트 클라우드 모델 매칭 실패 또는 대상 물체 인식 누락
원인 추측
-
매칭된 포즈 개수가 최대 출력 수에 도달했습니다.
-
매칭된 포즈의 점수가 신뢰도 임계값보다 낮습니다.
-
일부 대상 물체가 다른 물체와 겹쳐져 있고, 겹쳐진 비율이 설정된 임계값보다 커서 인식이 누락되는 경우가 있습니다.
-
대상 물체 포인트 클라우드의 누락 문제로 인한 인식 실패입니다.
솔루션
-
최대 출력 파라미터 값을 크게 조정합니다.
-
실제 상황에 따라 신뢰도 임계값을 조정하고 점수가 낮은 포즈를 제거합니다.
-
실제 프로젝트에서 겹쳐진 대상 물체와 중첩된 대상 물체의 피킹을 허용하려면 겹친 비율의 역치 및 중첩 비율의 역치 값을 조정하여 크게 설정할 수 있습니다.
-
Mech-Eye Viewer에서 카메라 노출과 관련된 파라미터를 조정하고 대상 물체의 완전한 포인트 클라우드를 얻으려면 코딩 모드는 Reflective로 설정합니다. 카메라 파라미터에 대한 자세한 내용은 카메라 파라미터에 관한 설명을 참조하세요.