ハンド・アイ・キャリブレーションを再実行
ハンド・アイ・キャリブレーションとは、カメラ座標系とロボット座標系との対応関係(外部パラメータ)を求めることです。ビジョンシステムにより取得した対象物の位置姿勢をロボット座標系に変換し、ロボットが対象物の把持を完了させるように制御します。
|
どのような場合にハンド・アイ・キャリブレーションを再実施する必要がありますか?
アプリケーション導入時にすでにハンド・アイ・キャリブレーションを完了し、外部パラメータの精度がプロジェクト要求を満たしている場合でも、次のような場合には再度ハンド・アイ・キャリブレーションを行う必要があります。
-
ビジョンシステムの機器(カメラなど)を交換した場合:既存のロボットとカメラのハンド・アイ関係が適用できなくなるため、再度キャリブレーションを行う必要があります。
-
ロボットの作業環境やレイアウトが変更された場合:環境の変化がカメラとロボットの相対位置に影響を与える場合には、再度キャリブレーションを行う必要があります。
-
把持精度の要求が高くなった場合:元のキャリブレーション結果が現場の要件を満たしていない場合、より高い位置決め精度が求められるため、再度キャリブレーションを行う必要があります。
-
衝突や移動によりロボットまたはカメラの位置が変化した場合:カメラとロボットの相対位置に影響を与える可能性のある物理的な変化が生じた場合、再度キャリブレーションを行う必要があります。
-
把持ずれが発生し、外部パラメータの精度誤差が増大した場合:外部パラメータの精度低下はカメラの内部パラメータの精度低下やロボットの精度低下が原因である可能性があります。そのため、再度キャリブレーションを行う必要があります。外部パラメータの精度誤差の分析については、外部パラメータ精度誤差の分析方法 を参照してください。
-
内部パラメータを修正した場合:内部パラメータ修正ツールで内部パラメータを修正した後は、再度キャリブレーションを行う必要があります。
-
長期間の運用後、システムの安定性を確保するため、定期的に再度キャリブレーションを行う必要があります。
外部パラメータ精度誤差の分析方法
外部パラメータ精度誤差の分析方法(ETHの場合)
把持精度の要件が高くない場合(誤差を数センチメートル程度に収める)、「シーンビューでロボットの点群とロボットモデルとの重なりを確認する」ことで、外部パラメータの精度誤差が大きすぎるかどうかを迅速に判断できます。
高精度が求められる場合(誤差を数ミリメートル程度に収める)、外部パラメータ精度誤差分析ツール(ETH)を使用して外部パラメータを評価することができます。
シーンビューでロボットの点群とロボットモデルとの重なりを確認
シーンビューでロボットの点群とロボットモデルの重なりを確認することで、キャリブレーション結果をおおまかに判断することができます。詳細な手順は以下の通りです。
-
ロボット本体(できれば5軸部分)をカメラの視野内に移動させます。
-
Mech-Visionを起動し、プロジェクトリストからプロジェクトを選択し、ツールバーで カメラキャリブレーション をクリックします。すると、キャリブレーション前の設定 画面が表示されます。
-
キャリブレーションの実行方法を選択 で 既存のキャリブレーションパラメータを使用 を選択し、このプロジェクトに格納されているキャリブレーションパラメータを選択し、次へ をクリックします。
-
パラメータの使用法を選択 画面で、現在読み込んでいるカメラをキャリブレーション を選択してから 次へ をクリックします。
カメラステータス が「接続済み」と表示されます。 -
キャリブレーションのタスクを選択 画面で、外部パラメータを再計算 を選択し、キャリブレーションデータを読み込む にチェックを入れてから 実行 をクリックします。すると、キャリブレーション 画面が表示されます。
-
外部パラメータを計算 手順で、外部パラメータを計算 をクリックします。この操作により、カメラが撮影を行い、ロボットの点群が生成されます。
-
右側の シーンビュー タブに切り替え、ロボットの点群とロボットモデルの重なりを確認します。
ロボットの点群がロボットモデルから大きくずれている場合、これは外部パラメータの誤差が大きいことを示し、キャリブレーションを再度実行する必要があります。
外部パラメータ精度誤差分析ツール(ETH)を使用して外部パラメータを検証
外部パラメータを検証する前に、キャリブレーションボードがロボット先端にしっかりと取り付けられていることを確認してください。キャリブレーションボードを取り付けた後、メニューバーから を選択し、誤差分析 画面で を選択します。
外部パラメータ精度誤差分析ツール(ETH)を使用して外部パラメータを検証するための手順は以下の通りです。
-
キャリブレーションボードの位置姿勢を取得するためのプロジェクトを新規作成します。今回作成したプロジェクトは下図のような流れで処理を行います。

-
ロボット実機の位置姿勢を同期させ、キャリブレーションボードの点群を含むシーンの点群を取得します。
-
プロジェクト内の「経路計画」ステップを選択し、ステップパラメータ パネルで 設定ツールを開く をクリックして仮想空間に入ります。
-
「経路計画」ステップのツールにロボット実機の位置姿勢を同期させ、仮想ロボットとロボット実機の位置姿勢が同じであることを確認します。
-
シミュレート をクリックし、キャリブレーションボードを含むシーンの点群を可視化します(シミュレート をクリックした後のエラーメッセージは無視できます)。
-
-
キャリブレーションボードの仮想TCPを作成します。
-
「経路計画設定ツール」のリソースにロボットハンドを追加します。
-
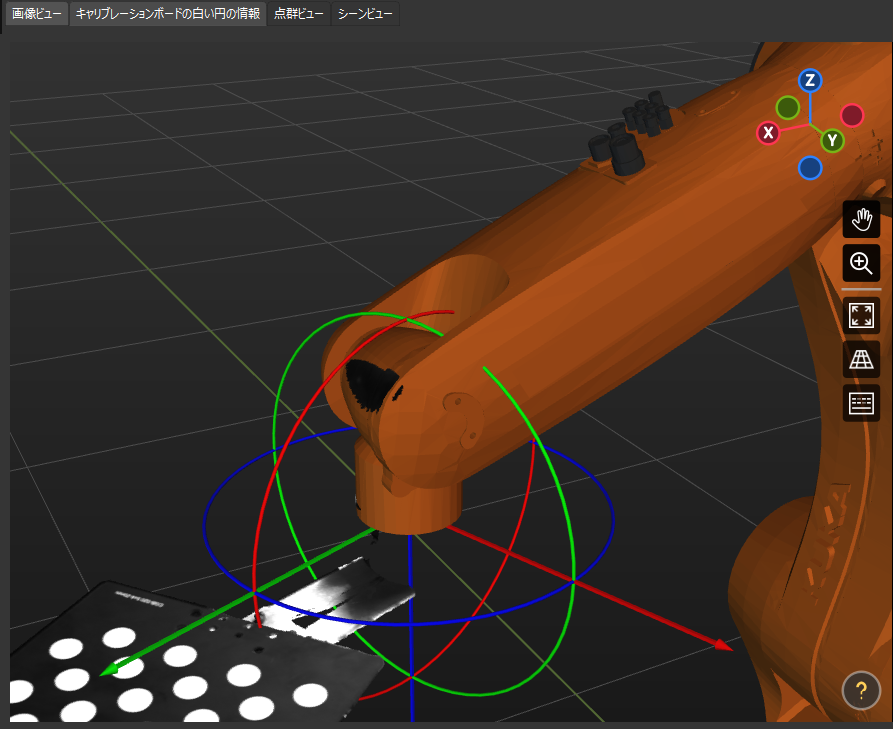
仮想空間でロボットハンドの表示を確認し、TCPがキャリブレーションボードの白い円の中心と一致するようにパラメータを調整します(位置姿勢のX軸とY軸は円の中心の十字と一致し、XOY平面はキャリブレーションボードの平面と一致する必要があります)。
-
名前を入力し、「OK」をクリックして仮想TCPの作成を完了します。
-
-
稼働空間内の他の位置で外部パラメータを検証します。
-
ロボット実機を稼働空間の他の位置に移動させます。
-
「経路計画」ステップのツールにロボット実機の位置姿勢を同期させ、仮想ロボットとロボット実機の位置姿勢が同じであることを確認します。
-
シミュレート をクリックして、新しいキャリブレーションボードとシーンの点群を取得します。
-
前の手順で追加した仮想TCPがキャリブレーションボード上の白い円の中心と一致しているか確認します。
-
仮想TCPとキャリブレーションボード上の白い円が大きくずれている場合、外部パラメータの誤差が大きく、キャリブレーションを再度実行する必要があります。
外部パラメータ精度誤差の分析方法(EIHの場合)
把持精度の要件が高くない場合(誤差を数センチメートル程度に収める)、「シーンビューでロボットの点群とロボットモデルとの重なりを確認する」ことで、外部パラメータの精度誤差が大きすぎるかどうかを迅速に判断できます。
高精度が求められる場合(誤差を数ミリメートル程度に収める)、外部パラメータ精度誤差分析ツール(EIH)を使用して外部パラメータを評価することができます。
シーンビューでロボットの点群とロボットモデルとの重なりを確認
シーンビューでロボットの点群とロボットモデルの重なりを確認することで、キャリブレーション結果をおおまかに判断することができます。詳細な手順は以下の通りです。
-
ロボット先端を、カメラがロボット台座を撮影できる位置まで移動させます。
-
Mech-Visionを起動し、プロジェクトリストからプロジェクトを選択し、ツールバーで カメラキャリブレーション をクリックします。すると、キャリブレーション前の設定 画面が表示されます。
-
キャリブレーションの実行方法を選択 で 既存のキャリブレーションパラメータを使用 を選択し、このプロジェクトに格納されているキャリブレーションパラメータを選択し、次へ をクリックします。
-
パラメータの使用法を選択 画面で、現在読み込んでいるカメラをキャリブレーション を選択してから 次へ をクリックします。
カメラステータス が「接続済み」と表示されます。 -
キャリブレーションのタスクを選択 画面で、外部パラメータを再計算 を選択し、キャリブレーションデータを読み込む にチェックを入れてから 実行 をクリックします。すると、キャリブレーション 画面が表示されます。
-
外部パラメータを計算 手順で、外部パラメータを計算 をクリックします。この操作により、カメラが撮影を行い、ロボットの点群が生成されます。
-
右側の シーンビュー タブに切り替え、ロボットの点群とロボットモデルの重なりを確認します。
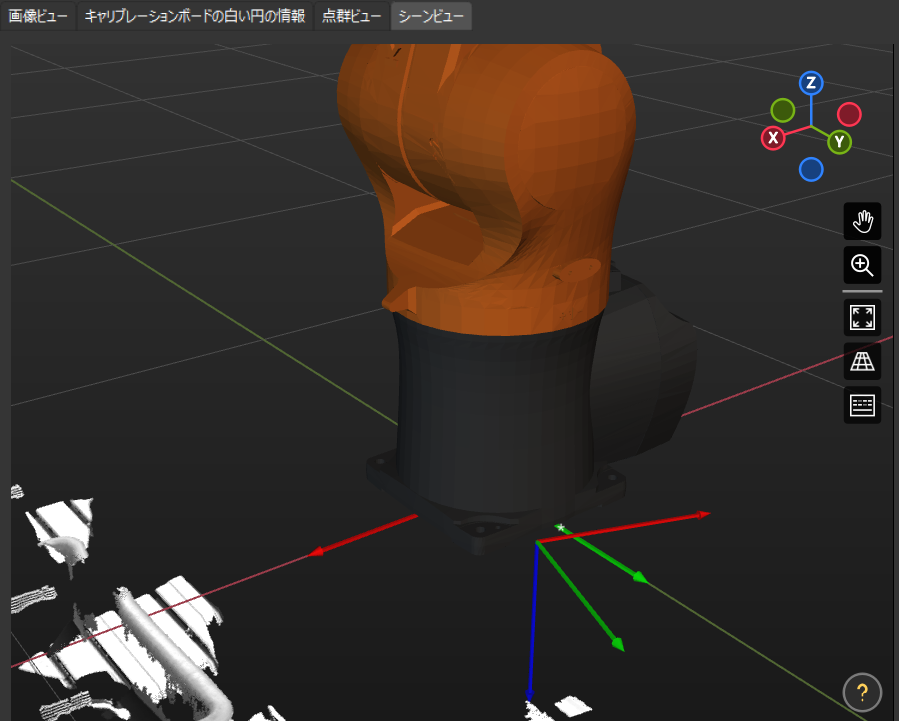
ロボットの点群がロボットモデルから大きくずれている場合、これは外部パラメータの精度誤差が大きいことを示し、キャリブレーションを再度実行する必要があります。
外部パラメータ精度誤差分析ツール(EIH)を使用して外部パラメータを検証
外部パラメータ精度誤差分析ツール(EIH)を使用して、外部パラメータの精度誤差を検証することができます。
詳細な手順は以下の通りです。
-
Mech-Visionを起動し、プロジェクトリストからプロジェクトを選択し、ツールバーで カメラキャリブレーション をクリックします。
-
キャリブレーション前の設定 で 既存のキャリブレーションパラメータを使用 を選択し、このプロジェクトに格納されているキャリブレーションパラメータを選択し、次へ をクリックします。
-
パラメータの使用法を選択 画面で、現在読み込んでいるカメラをキャリブレーション を選択してから 次へ をクリックします。
カメラステータス が「接続済み」と表示されます。 -
キャリブレーションのタスクを選択 画面で、外部パラメータを再計算 を選択し、キャリブレーションデータを読み込む にチェックを入れてから 実行 をクリックします。すると、キャリブレーション 画面が表示されます。
-
外部パラメータを計算 手順で、外部パラメータを計算 をクリックします。
-
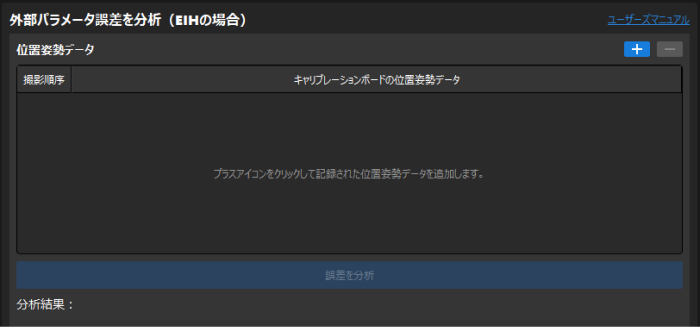
補助ツール では、外部パラメータの精度チェック をクリックし、「外部パラメータ誤差を分析(EIHの場合)」を選択します。
-
関連する操作方法を確認したら、次へ をクリックします。
-
+ をクリックし、複数のキャリブレーションボードの位置姿勢データを追加します。
-
誤差を分析 をクリックし、分析結果を確認します。
誤差値が大きい場合(プロジェクトの把持精度要件より大きい場合)、キャリブレーションを再度実行する必要があります。