ビジョンシステムが結果を出力しない
ビジョンシステムが結果を出力しない問題とその解決方法について説明します。
ビジョンシステムが結果を出力しない問題は、通常他の問題と一緒に発生することが多いため、問題の現象に応じて適切な対処を行ってください。
画像取得異常
| 問題 | 解決策 |
|---|---|
Mech-Eye Viewerでカメラが検出されない |
カメラが検出されない を参照してトラブルシューティングを行ってください。 |
Mech-Eye Viewerでカメラが検出されるが、Mech-Visionで画像を取得できない |
Mech-Eye Viewerでカメラが検出されたが、Mech-Visionでは画像を取得できない を参照してトラブルシューティングを行ってください。 |
安定した生産中にカメラの接続が切断されることがある |
カメラの偶発的な接続切断 を参照してトラブルシューティングを行ってください。 |
取得した点群に抜けが発生する |
点群抜け を参照してトラブルシューティングを行ってください。 |
画像の取得時間が長すぎる |
画像の取得時間が長すぎる を参照してトラブルシューティングを行ってください。 |
3D ROIに点群がない
問題:
ビジョンシステムがロボットやPLCに結果を出力せず、3D ROI内に点群が存在しません。
3D ROI を設定するために使用できる一般的なステップは、「ワーク認識」と 「3D ROI内の点群を抽出」です。
考えられる原因:
3D ROIが正しく設定されません。
解決策:
3D ROIを適切に設定 してください。
ディープラーニング推論結果なし
問題:
Mech-Visionプロジェクトで「ディープラーニングモデルパッケージを推論」ステップを使用してディープラーニング推論を実行すると、推論結果は空になります。
考えられる原因:
信頼度しきい値が高すぎます。
解決策:
「ディープラーニングモデルパッケージを推論」ステップのパラメータで、インスタンスセグメンテーションの信頼度しきい値 を 下げ てください。
それでも解決しない場合は、テクニカルサポートにお問い合わせください。
3Dマッチング結果なし
問題:
3Dマッチングに関連するステップや「ワーク認識」ステップで結果が出力されません。
考えられる原因:
-
ステップに点群入力がありません。
-
「3D位置姿勢高精度推定」または「ワーク認識」ステップの 信頼度しきい値 パラメータが高すぎるため、すべてのマッチング結果がフィルタリングされます。
-
供給するワークが変化し、ワークの点群モデルが実際にマッチングするワークと一致しません。
解決策:
以下の手順で問題を解決してください。
-
Mech-Visionでは、3Dマッチングに関連するステップや「ワーク認識」ステップ上のデータフローをダブルクリックし、デバッグ結果出力 画面で点群があるか確認します。
-
点群がある場合、次の手順に進みます。
-
点群がない場合、3D ROI、クラスタリングおよびフィルタリングに関連するパラメータの設定が適切であるか確認します。
-
-
「3D位置姿勢高精度推定」または「ワーク認識」ステップをクリックして選択し、信頼度しきい値を小さくに設定し、シングル実行します。デバッグ結果出力 画面でマッチング結果があるか確認します。
-
マッチング結果がある場合、次の手順に進みます。
-
マッチング結果がない場合、テクニカルサポートにお問い合わせください。
-
-
デバッグ結果出力 画面で、マッチングするワークの点群が点群モデルと一致しているかどうかを確認します。
-
一致している場合、トラブル対処は終了します。
-
一致していない場合、ワークの点群モデルを再作成し、ステップで呼び出される点群モデルを変更します。
-
Mech-Visionプロジェクト実行がタイムアウトする
問題:
ビジョンシステムがロボットまたはPLCに結果を出力せず、Mech-Visionのログバーの コンソール タブに「[1019] Mech-Vision:実行はタイムアウトしました」というログが表示されます。
解決策:
以下の手順で問題を解決してください。
-
IPCのディスク容量が不足していないか確認します。
-
ディスク容量が不足している場合は、不要なファイルを削除してディスクを整理します。その後、次の手順に進みます。
-
それ以外の場合は、次の手順に進みます。
-
-
1019エラーコード を参照して問題を解決してください。
-
問題が解決できない場合は、テクニカルサポートにお問い合わせください。
外部パラメータファイルの欠損または破損
問題:
カメラ外部パラメータファイル(Mech-Visionプロジェクトディレクトリ内の calibration/カメラ番号/extri_param.json ファイル)の内容が欠損しています。
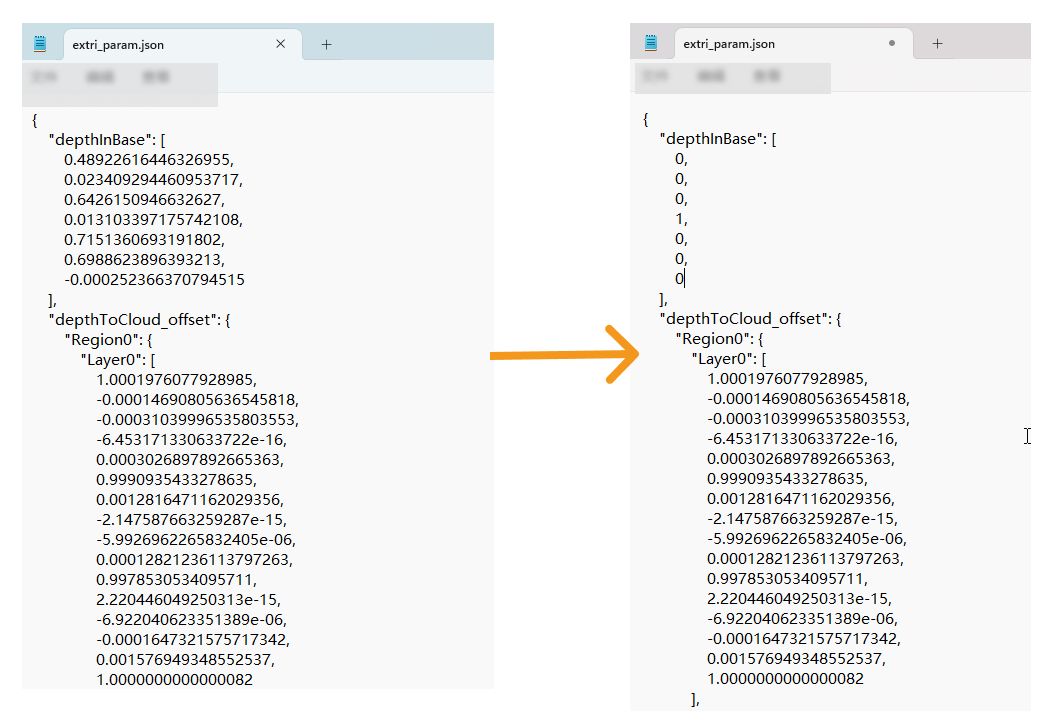
考えられる原因:
IPCが異常な電源断により外部パラメータファイルの内容が失われた可能性があります。
解決策:
バックアップされたファイルを使用して復元するか、ハンド・アイ・キャリブレーション を再実行してください。
ステップ間のデータフローが切断される
問題:
ソフトウェアのアップグレード、電源切断、または誤操作により、ステップ間のデータフローの接続が切断されることがあります。
解決策:
ステップ間のデータフローを再接続してください。
Mech-Visionソフトウェアのクラッシュまたはメモリ不足
問題:
IPCのメモリが不足しているため、以下の問題が発生することがあります。
-
Mech-Visionのログに「bad allocation」というエラーメッセージが表示されます。
-
Mech-Visionが長時間応答しません。
-
Mech-Visionソフトウェアがクラッシュします。
解決策:
ロボットは経路点に到達できない
問題:
ロボットが指定された経路点に到達できず、エラーログが表示されます。
-
Mech-Visionを使用して経路計画を行う場合、Mech-Visionのログバーの コンソール タブに「[1030] Mech-Vision:ロボットは経路点に到達できません」というメッセージが表示されます。
-
Mech-Vizを使用して経路計画を行う場合、Mech-Visionのログバーの コンソール タブに「[2004] Mech-Viz:ロボットは経路点に到達できません」というメッセージが表示されます。
解決策:
1030エラーコード または 2004エラーコード を参照してトラブルシューティングを行ってください。問題が解決できない場合は、テクニカルサポートにお問い合わせください。
Mech-Vizプロジェクト実行がタイムアウトする
問題:
ビジョンシステムがロボットまたはPLCに結果を出力せず、Mech-Visionのログバーの コンソール タブに「[2025] Mech-Viz:実行はタイムアウトしました」というログが表示されます。
解決策:
以下の手順で問題を解決してください。
-
IPCのディスク容量が不足していないか確認します。
-
ディスク容量が不足している場合は、不要なファイルを削除してディスクを整理します。その後、次の手順に進みます。
-
それ以外の場合は、次の手順に進みます。
-
-
2025エラーコード を参照して問題を解決してください。
-
問題が解決できない場合は、テクニカルサポートにお問い合わせください。
Mech-Viz:ビジョンサービスがビジョン結果を出力しない
問題:
ビジョンシステムがロボットまたはPLCに結果を出力せず、Mech-Visionのログバーの コンソール タブに「[2037] Mech-Viz:ビジョンサービスがビジョン結果を出力していません」というメッセージが表示されます。
解決策:
2037エラーコード を参照して問題を解決してください。問題が解決できない場合は、テクニカルサポートにお問い合わせください。
Mech-Viz:特異点が検出される
問題:
ビジョンシステムがロボットまたはPLCに結果を出力せず、Mech-Visionのログバーの コンソール タブに「[2020] Mech-Viz:特異点が検出されました」というメッセージが表示されます。
解決策:
2020エラーコード を参照して問題を解決してください。問題が解決できない場合は、テクニカルサポートにお問い合わせください。
Mech-Viz:ロボットの衝突が検出される
問題:
ビジョンシステムがロボットまたはPLCに結果を出力せず、Mech-Visionのログバーの コンソール タブに「[2031] Mech-Viz:ロボットの衝突が検出されました」というメッセージが表示されます。
解決策:
2031エラーコード を参照して問題を解決してください。問題が解決できない場合は、テクニカルサポートにお問い合わせください。