点検とメンテナンス
現場設備は、点検基準に基づき、定められた周期内に適切な方法でビジョンシステムのハードウェアおよびソフトウェアを点検する必要があります。これにより、設備の故障リスクを早期に発見し、迅速な修理や調整を可能にします。
| 種類 | 点検項目 | 点検内容 | 周期 |
|---|---|---|---|
カメラハウジング |
カメラが衝突したか確認する |
毎日1回 |
|
カメラケーブル |
カメラケーブルが劣化していないか確認する |
毎日1回 |
|
ケーブルの両端の接続がしっかりしているか確認する |
毎日1回 |
||
ケーブルに折れ曲がり、ねじれ、または摩耗がないか確認する |
毎日1回 |
||
カメラスタンド |
スタンドに変形や揺れがないか、接続ボルトが緩んでいないか確認する |
2週間に1回 |
|
IPC |
通風・放熱が良好な環境に設置されているか確認する |
1週間に1回 |
|
IPCを再起動する |
1週間に1回 |
||
IPC周辺機器 |
ケーブルの接続部に緩みがないか確認する |
1週間に1回 |
|
スイッチ |
スイッチが正常に動作しているか確認する |
1週間に1回 |
|
ロボット台座 |
ロボット台座に揺れが発生していないか確認する |
6ヶ月に1回 |
|
ロボットの原点 |
ロボットの原点がずれていないか確認する |
2ヶ月に1回 |
|
カメラの内部パラメータ |
内部パラメータの精度が変化していないか確認する |
2ヶ月に1回 |
|
カメラの外部パラメータ |
外部パラメータの精度が変化していないか確認する |
2ヶ月に1回 |
カメラと付属品
カメラハウジング
カメラハウジングは、カメラ内部の精密部品を保護し、カメラの密閉状態を維持する重要な構造です。定期的な日常的なメンテナンスが必要であり、点検周期は1日1回 を推奨します。
目視でカメラの外観を確認し、衝突や変形、擦り傷がないかを判定することで、カメラが衝突を受けたかどうかを確認できます。衝突が発生した場合、ソフトウェアを使用して内外部パラメータの精度が変化していないかを確認する必要があります。変化がした場合、安全を確保するために使用を中止し、カメラを交換するか、再度キャリブレーションを行ってください。内外部パラメータのチェックの具体的な操作については、カメラの内部・外部パラメータの点検 をご参照ください。

カメラケーブル
カメラケーブルには電源ケーブルとLANケーブルがあります。電源ケーブルは3Dカメラに必要な安定した電圧を供給し、LANケーブルは3DカメラとIPCの間で安定したデータ伝送環境を提供します。どちらも定期的な日常的な点検が必要です。 点検周期は1日1回を推奨します。
定期的に カメラケーブルの劣化がないか、カメラケーブルの両端がしっかり接続されているかを確認 する必要があります。カメラケーブルがロボットのケーブル保護管を通して配線されている場合、ケーブル両端の接続状態を確認するだけでなく、ケーブル保護管の摩耗状況に応じて、ケーブルに曲げ、ねじれ、摩耗がないかも確認 する必要があります。問題があった場合は、Mech-Mindに連絡してケーブルの交換を行ってください。

| カメラは長時間使用しない場合、電源を切る必要があります。 |
カメラスタンド
カメラスタンドは3Dカメラを取り付けるための重要な固定構造であり、その安定性は3Dカメラの外部パラメータの精度に直接影響します。そのため、定期的な点検が必要です。点検周期は2週間に1回を推奨します。
目視で カメラスタンドに変形や揺れがないか、接続ボルトが緩んでいないかを確認 することで、カメラの取り付けが安定しているかを判断できます。点検が不合格の場合、ソフトウェアを使用して内外部パラメータの精度が変化していないかを確認する必要があります。精度が変化した場合、安全を確保するために使用を中止し、再度キャリブレーションを行ってください。内外部パラメータのチェックの具体的な操作については、カメラ内部・外部パラメータの点検 をご参照ください。

IPCとスイッチ
-
3DビジョンソフトウェアはすべてIPCにインストールされており、IPCの状態はビジョンソフトウェアの動作や計算時間に直接影響を与えます。IPCが正常に動作するためには、定期的な日常点検が必要です。点検周期は1週間に1回を推奨します。
-
スイッチとLANケーブルは各ハードウェアのネットワーク接続に使用されており、定期的な点検を行うことでネットワーク通信の障害を減少させることができます。点検周期は1週間に1回を推奨します。
-
IPCの周辺機器:重要な部分にはIPCの電源、LANケーブル、およびソフトウェアライセンス装置(ドングル)が含まれます。その他の部分にはキーボードとマウスの接続ケーブル、HDMIビデオケーブルが含まれます。IPCが安定して動作するためには、ケーブルの接続部分が緩んでいないか定期的に点検する必要があります。点検周期は1週間に1回を推奨します。

-
IPCは通風と冷却が良好な環境に設置することを推奨します。また、定期的に再起動し、安定した動作を維持することが重要です。IPCを密閉された狭い空間に置かず、表面には無関係な物を置かないように注意してください。冷却通風口を遮らないようにし、IPC本体周囲には少なくとも5センチの隙間を確保して、過熱を防止してください。点検周期は1週間に1回を推奨します。
ロボット
ロボットは作業フローを実行する役割を担っており、その精度は把持精度に直接影響します。
-
ロボット台座:ロボット台座に揺れがないかを確認する必要があります。揺れがある場合は、使用を停止し、ロボットを再度固定し、外部パラメータを再キャリブレーションしてください。点検周期は6ヶ月に1回を推奨します。
-
ロボット原点:ロボットの原点がずれると、ロボットの精度に影響を与えます。お使いのロボットの操作マニュアルを参照して原点の確認を行ってください。原点がずれている場合は、ロボットの使用を停止し、原点および外部パラメータを再キャリブレーションしてください。点検周期は2ヶ月に1回を推奨します。
カメラの内部・外部パラメータ
カメラソフトウェアに関しては、主にカメラの内部・外部パラメータを確認します。これらのパラメータは、ビジョン認識の精度に影響を与えるため、点検周期は2ヶ月に1回を推奨します。カメラの内外部パラメータの確認にはビジョンソフトウェアを使用する必要があるため、技術者の指導のもとで操作してください。
|
カメラの内外部パラメータをチェックする前に、必ずカメラの暖機運転を行ってください。カメラが熱平衡に達するまで、点群再構築の精度を十分に保証することはできません。カメラの暖機運転を行うには、以下のいずれかの方法を使用します。
|
内部パラメータのチェック方法
キャリブレーションボードをカメラの視野内に配置し、ボードとカメラの距離は可能な限りカメラの焦点距離と一致させます。さらに、キャリブレーションボードがカメラの下表面とできるだけ平行になるように配置した後、ソフトウェア操作を行います。
-
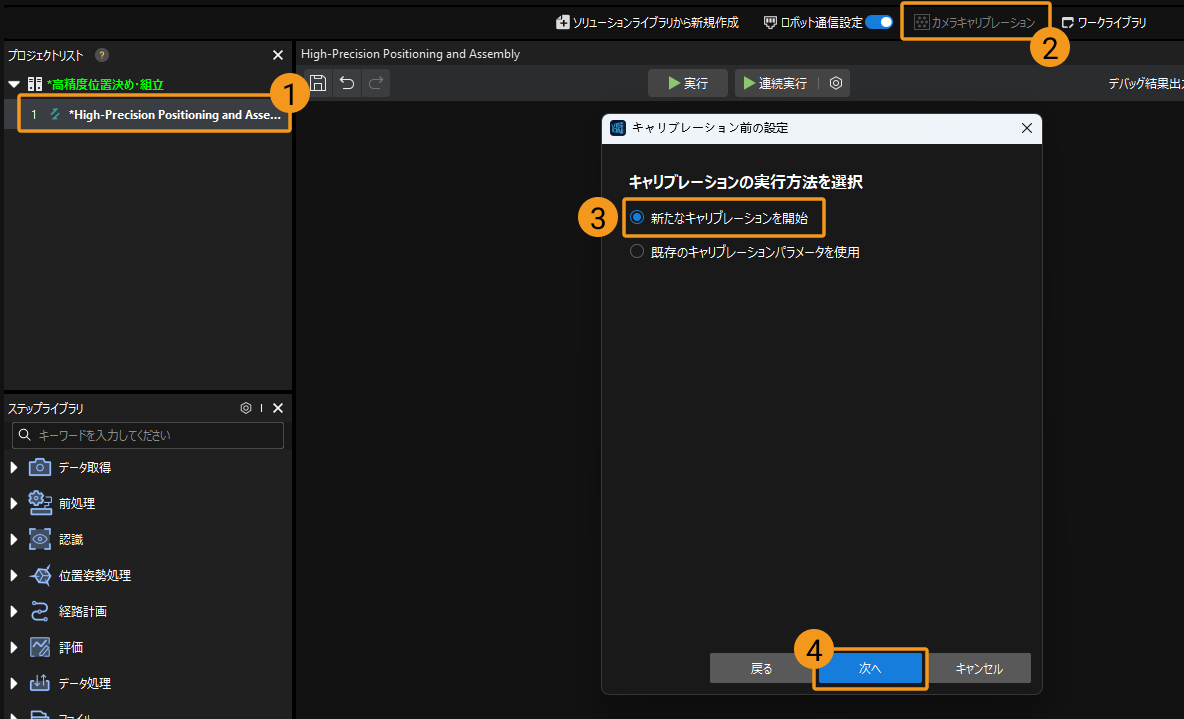
Mech-Visionを起動し、プロジェクトを選択します。ツールバーの カメラキャリブレーション をクリックし、新たなキャリブレーションを開始 を選択してから 次へ をクリックします。
-
キャリブレーション前の確認作業が完了したことを確認し、確認完了 をクリックし、下の 次へ をクリックします。
-
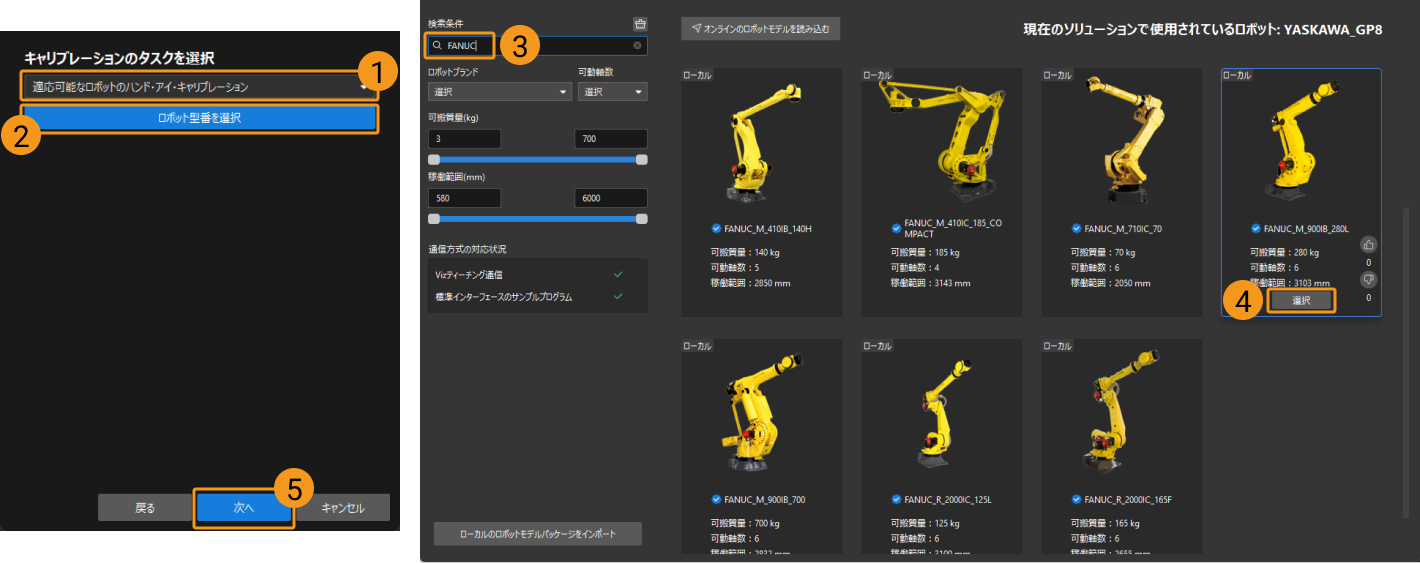
現場で使用しているロボットに基づいて、ロボットの型番を選択します。その後、下図のように設定を行います。
-
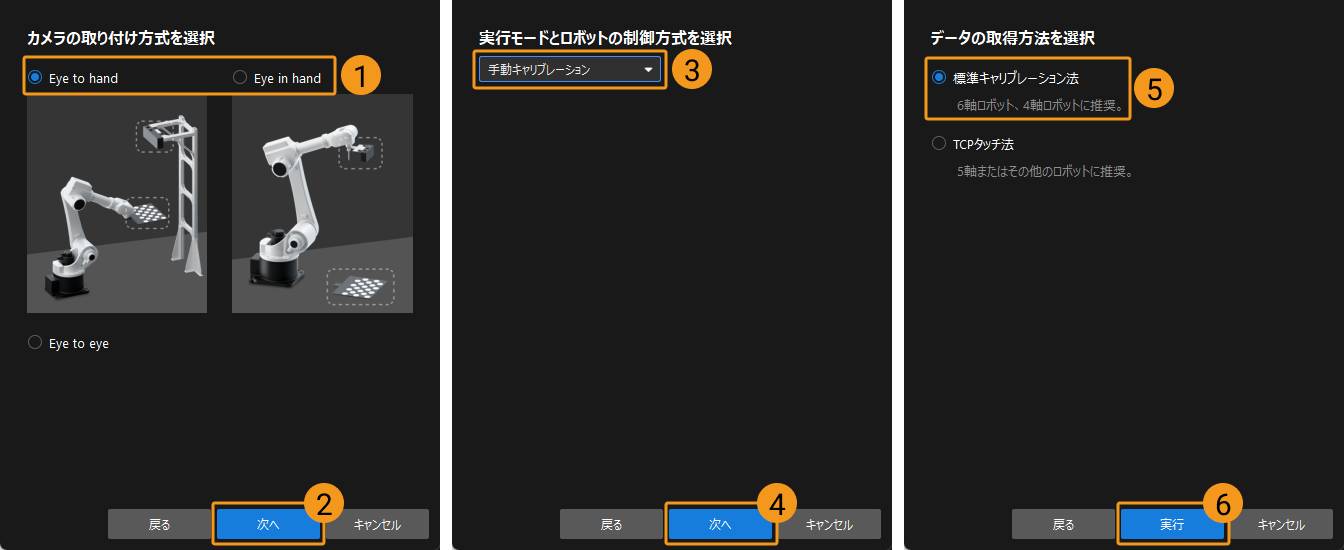
カメラの取り付け方式に応じて、「Eye to Hand」または「Eye in Hand」を選択し、その後、下図のように設定を行います。
-
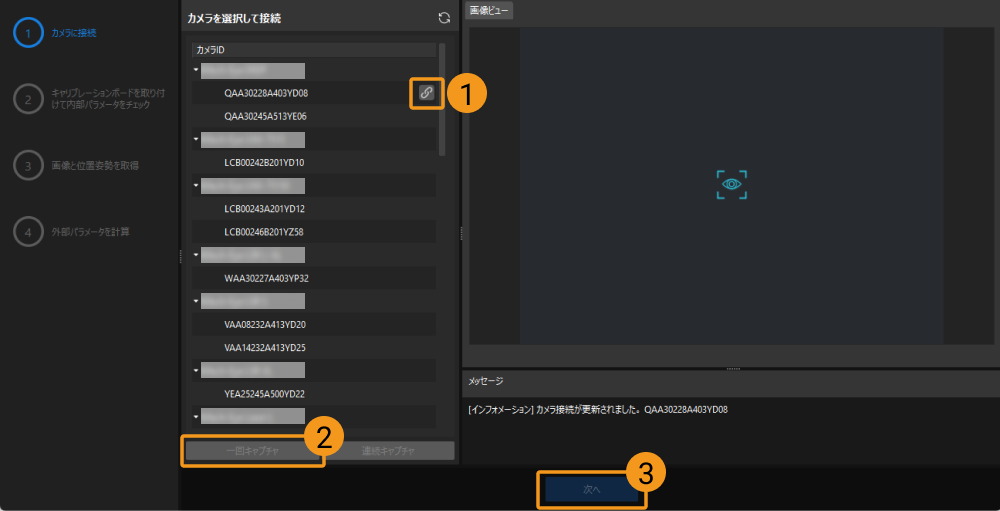
カメラに接続 手順では、カメラを選択して接続し、一回キャプチャ をクリックします。取得した2D画像と深度画像が要件を満たしていることを確認した後、次へ をクリックします。
-
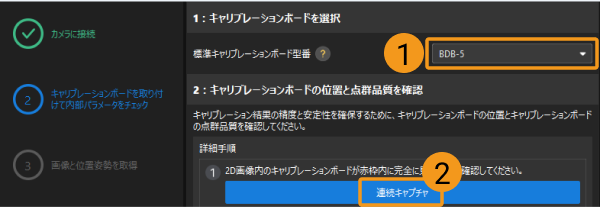
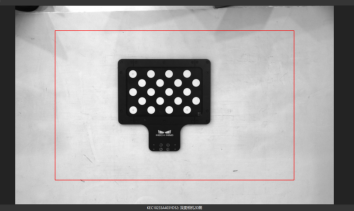
キャリブレーションボードを取り付けて内部パラメータをチェック 手順では、使用するキャリブレーションボートに従って型番を選択します。その後、連続キャプチャ をクリックし、キャリブレーションボードが右側の赤枠内に収まっていることを確認してから、キャプチャを停止して位置を検出 をクリックします。
-
内部パラメータをチェック をクリックします。
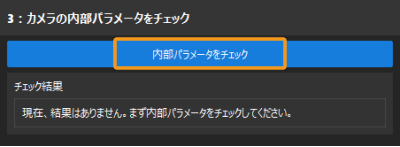
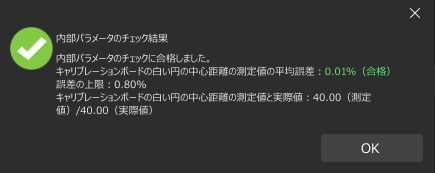
内部パラメータのチェックに成功した場合、下図のように表示されます。内部パラメータの誤差が正常範囲を超えている場合、表示される情報は赤色に変わります。この場合、問題を確認し、カメラの内部パラメータを再キャリブレーションする必要があります。
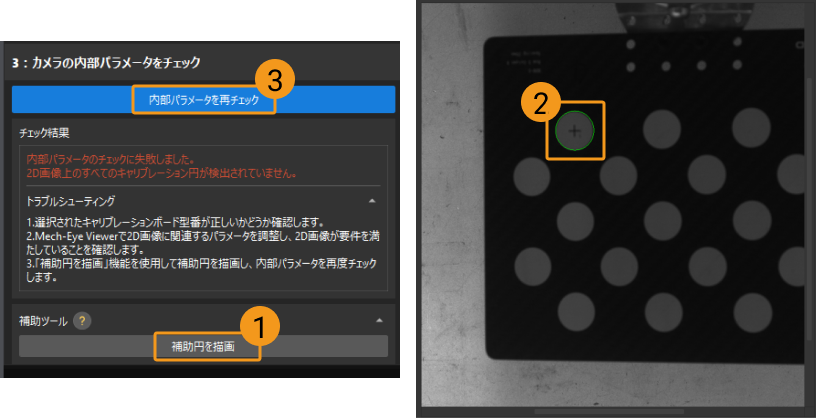
検出失敗の状態が表示された場合、補助円の描画操作 を行います。
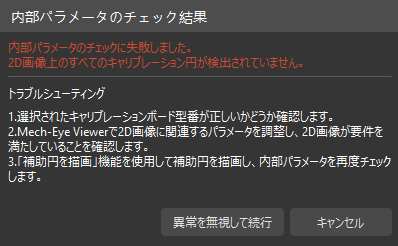
-
補助円を描画 をクリックし、マウスをキャリブレーションボードの白い円の十字型の中心に移動させ、マウスの左ボタンを押して補助円が白い円を完全に含むように調整した後、マウスの左ボタンを離します。その後、「内部パラメータを再チェック」をクリックします。
外部パラメータのチェック方法(ロボットモデルがある場合にのみ適用)
ロボットの点群とロボットモデルの重なり具合を確認することで、外部パラメータをチェックできます。高い精度が求められるシーン(±2mm以内)では、外部パラメータ精度誤差分析ツールを使用して、外部パラメータを全面的に検証する必要があります。
ロボットの点群とロボットモデルの重なり具合の確認(ETH)
-
ロボット本体(できれば5軸部分)をカメラの視野内に移動させます。
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション をクリックします。
-
「キャリブレーション前の設定」画面で、キャリブレーションの実行方法を選択 を 既存のキャリブレーションパラメータを使用 に、パラメータの使用法を選択 を 現在読み込んでいるカメラをキャリブレーション に、キャリブレーションのタスクを選択 を 外部パラメータを再計算 に設定した後、実行 をクリックします。
-
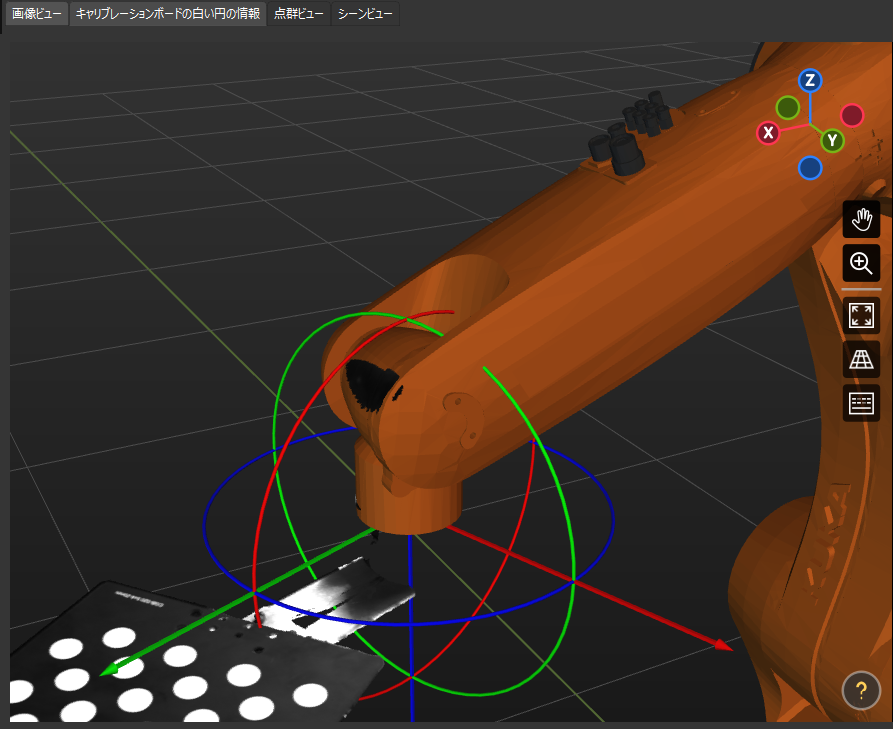
外部パラメータを計算 手順で、補助ツール の下の カメラによる取得 をクリックします。すると、カメラが撮影を行います。
-
右側の シーンビュー で、ロボット実機の点群とロボットモデルの重なり具合を目視で確認します。
ロボットの点群がロボットモデルとほぼ一致すれば、キャリブレーション結果が使用可能です。
ロボットの点群とロボットモデルの重なり具合の確認(EIH)
-
ロボット先端を、カメラがロボット台座を撮影できる位置まで移動させます。
-
Mech-Visionを起動し、プロジェクトリストからプロジェクトを選択し、ツールバーで カメラキャリブレーション をクリックします。
-
「キャリブレーション前の設定」画面で、キャリブレーションの実行方法を選択 を 既存のキャリブレーションパラメータを使用 に、パラメータの使用法を選択 を 現在読み込んでいるカメラをキャリブレーション に、キャリブレーションのタスクを選択 を 外部パラメータを再計算 に設定した後、実行 をクリックします。
-
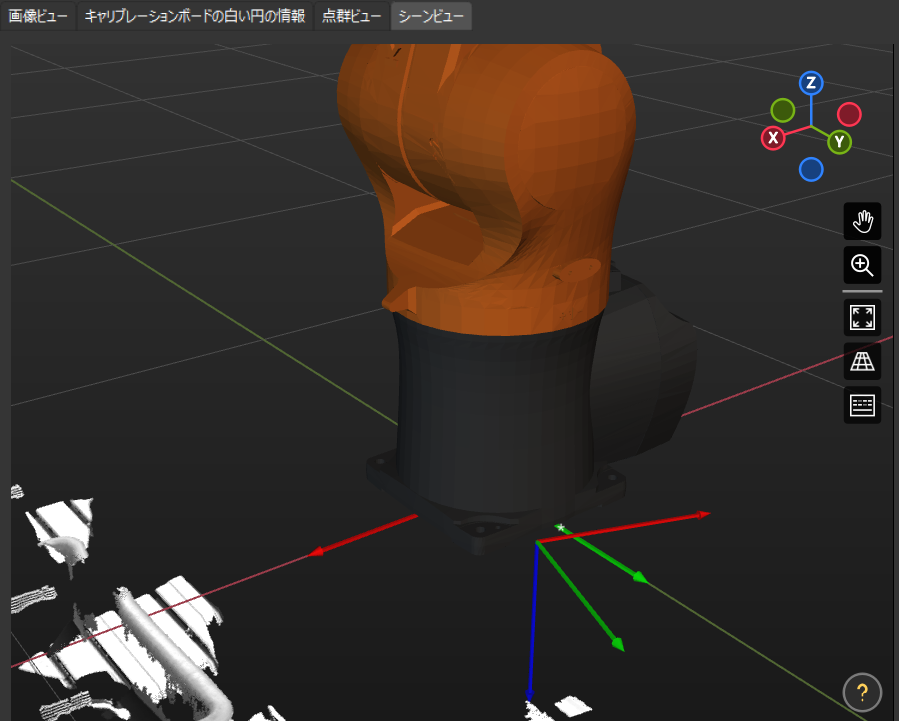
外部パラメータを計算 手順で、補助ツール の下の カメラによる取得 をクリックします。すると、カメラが撮影を行います。
-
右側の シーンビュー で、ロボット実機の点群とロボットモデルの重なり具合を目視で確認します。
ロボットの点群がロボットモデルとほぼ一致すれば、キャリブレーション結果が使用可能です。
外部パラメータ精度誤差分析ツールによる外部パラメータの検証
高い精度が求められるシーン(±2mm以内)では、この方法を用いて外部パラメータを全面的に検証する必要があります。
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション をクリックします。
-
「キャリブレーション前の設定」画面で、キャリブレーションの実行方法を選択 を 既存のキャリブレーションパラメータを使用 に、パラメータの使用法を選択 を 現在読み込んでいるカメラをキャリブレーション に、キャリブレーションのタスクを選択 を 外部パラメータを再計算 に設定した後、実行 をクリックします。
-
外部パラメータを計算 手順で、外部パラメータを計算 をクリックします。
-
補助ツール では、外部パラメータの精度チェック をクリックし、外部パラメータ精度誤差分析ツールを開きます。
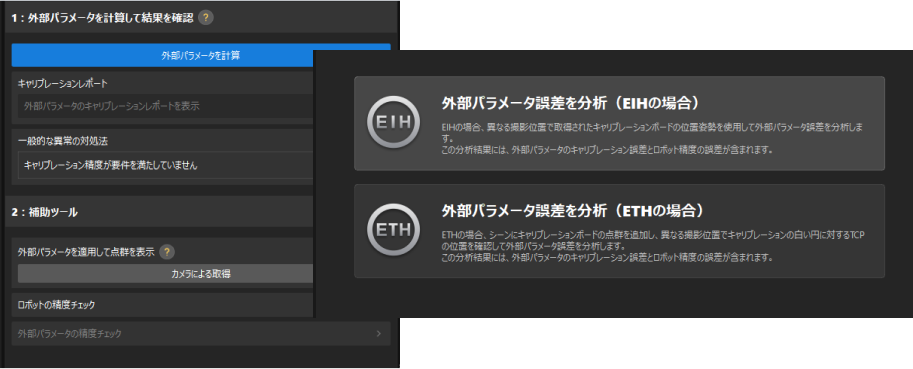
-
ツールの操作ガイドに従って外部パラメータの精度を検証し、最終的な評価レポートを生成してください。