小型ワークの高精度分割モデルのトレーニング
3D ビジョンによるクランクシャフト供給のプロジェクトを例に、視野が広くてワークサイズが小さいシーンンにおいてモジュールを接続して高精度のディープラーニングモデルをトレーニングする方法を紹介します。
トレーニング手順
クランクシャフト自動供給は、ロボットをガイドしてトレイからバラ積みワークを認識・把持します。以下の 3つの手順を実行します。
-
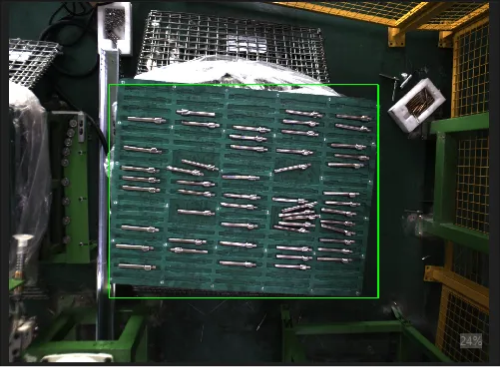
対象物検出モジュールでクランクシャフトが配置されたトレイを位置決めます。
-
インスタンスセグメンテーションモジュールでクランクシャフトを分割します。
-
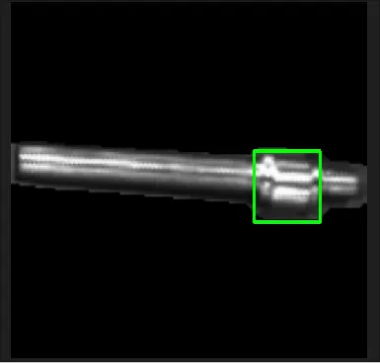
対象物検出モジュールでクランクシャフトの大きい端を位置決めます。
高精度のモデルを取得するために、各モジュールの機能を利用して段階的にデータを収集してラベルを付けます。
データ取得
カメラの 2D パラメータを調整する
-
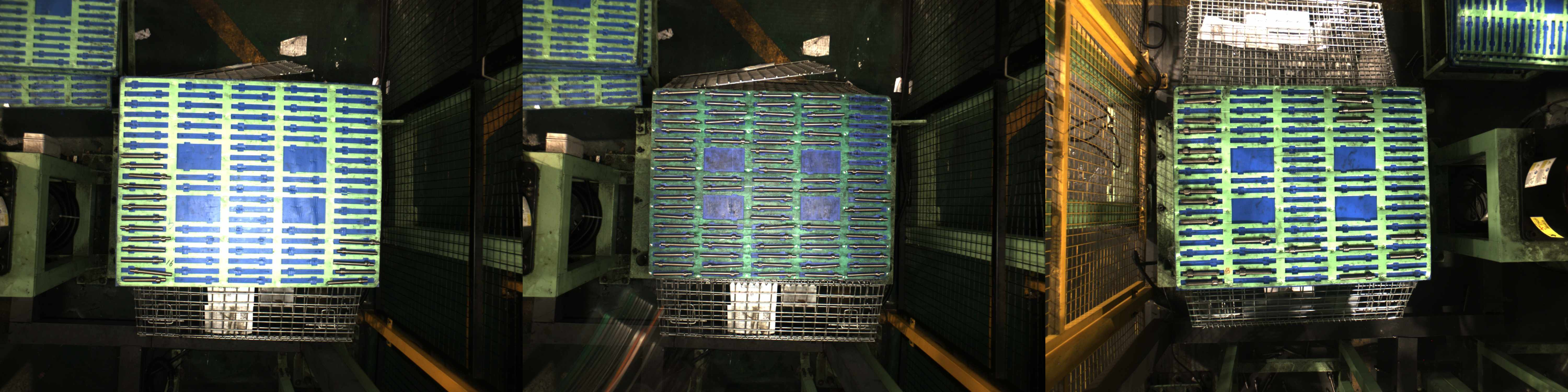
高解像度モード:高解像度カメラを使用することを推奨します。このプロジェクトでは、LSR L-V4 カメラは 12 メガピクセルの高解像度モードを使用します。
-
露出モード:環境光が変化しやすくてトレイの色も様々なので RGB カメラの露出モードを Auto に設定し、トレイを ROI として使用することを推奨します。
-
グレースケール値:クランクシャフトは高反射ワークなのでグレースケール値を調整してください。ダークカラーのトレイも、色が明るい取りも露出過度が発生しないようにしてください。
データの収集
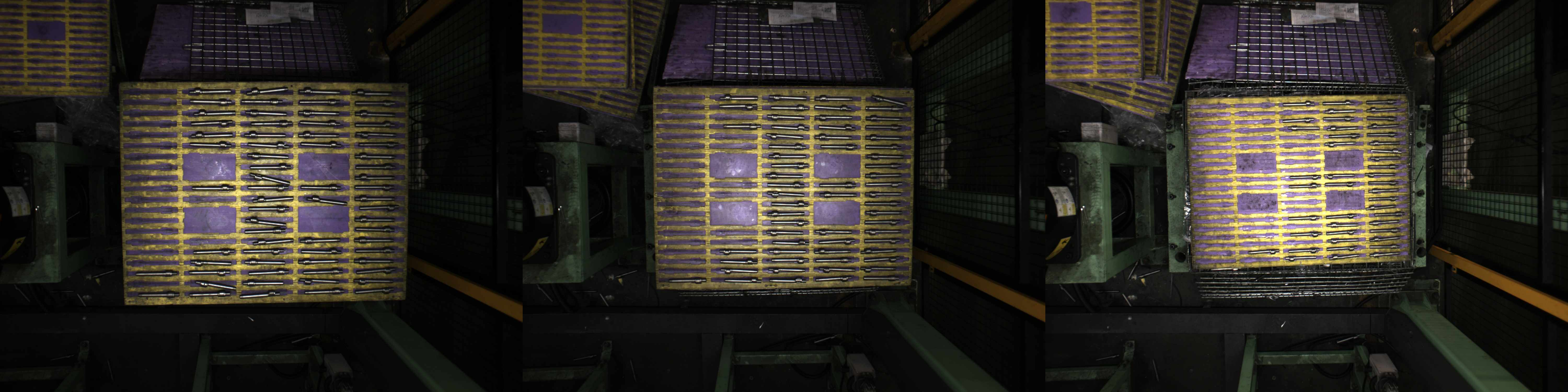
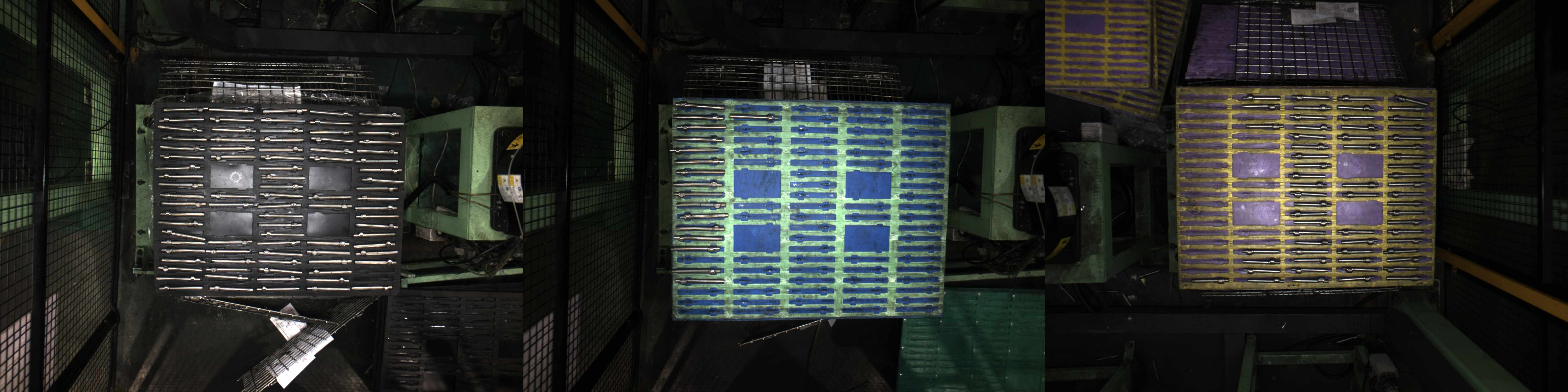
より多くのシーンをカバーするデータを取得するために、以下のシーンのデータを取得してください。
-
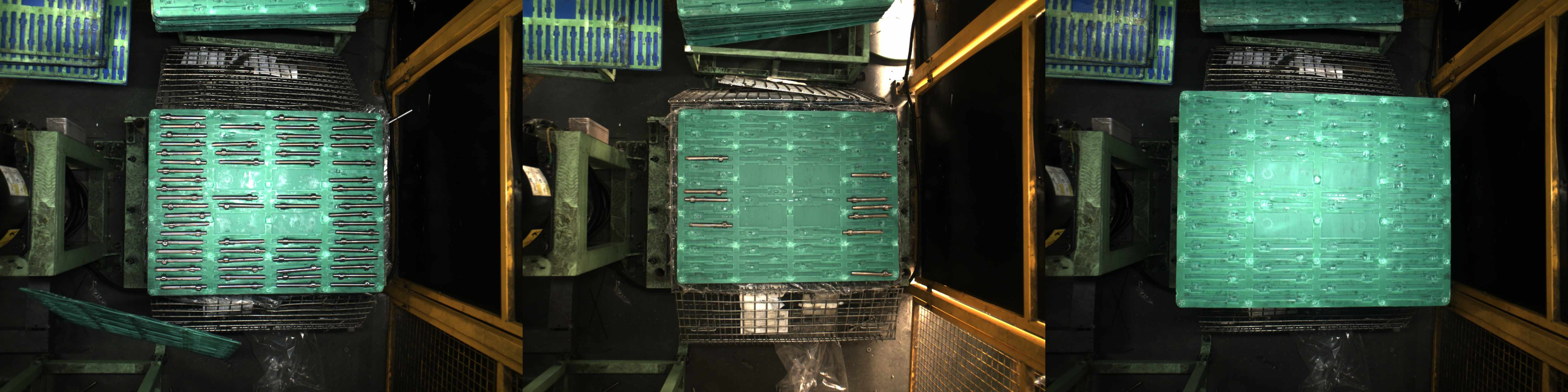
異なる層:異なる段の画像を取得します。特に最高層、中間層、最低層のデータを取得してください。
-
異なるトレイ:色が異なるトレイを使用したシーンのデータを取得してください。
-
異なる照明:朝晩、異なるワークステーションのデータ、特に反射が発生したシーンのデータを取得してください。
-
異なるクランクシャフトの数:トレイいっぱいから空きトレイまで、クランクシャフトの数が異なるシーンのデータ、特に 20 個以下のデータを取得してください。
データのフィルタリング
各モジュールに必要な対象物数に応じてトレーニングデータをフィルタリングします。
-
対象物検出
認識対象:トレイ
データの多様性を確保するために、トレイの色や位置、層、照明によってフィルタリングします。
-
インスタンスセグメンテーション
認識対象:クランクシャフト
クランクシャフトの数とトレイの色によって分割します。トレイいっぱいになる時のクランクシャフト数は 100 個です。0-20 個、20-50 個、50-100 個のクランクシャフトを約 1:1:1 の割合でデータを取得します。また、異なる色のトレイのデータも平均になるようにしてください。
-
対象物検出
認識対象:クランクシャフトの大きい端
データをフィルタリングして 100~300 枚の画像を選択して使用します。