データの取得例
本節では、一部のモジュールを使用してデータ収集を実行し、実際の応用で高品質の画像を取得する方法を説明します。
インスタンスセグメンテーション
-
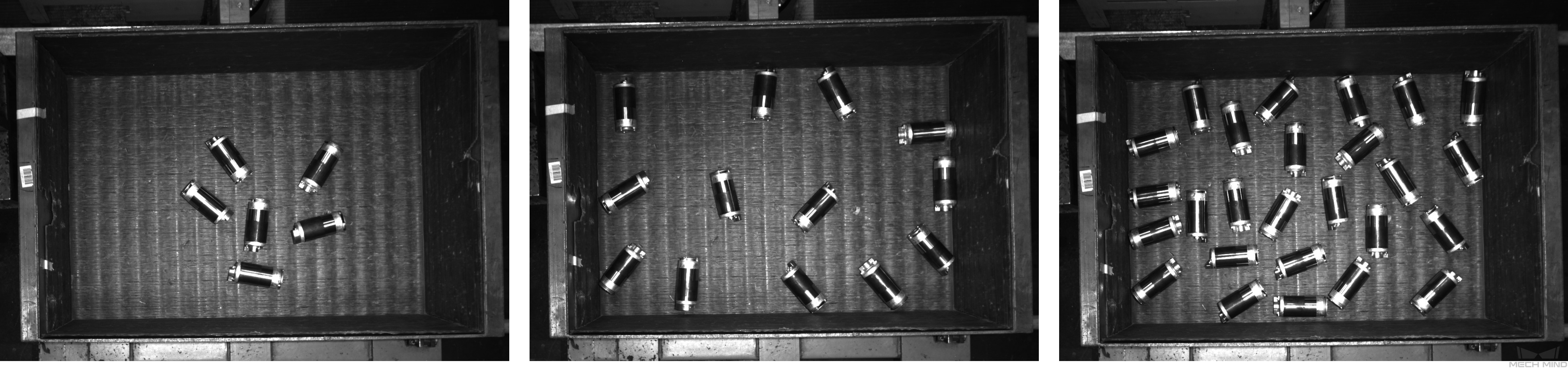
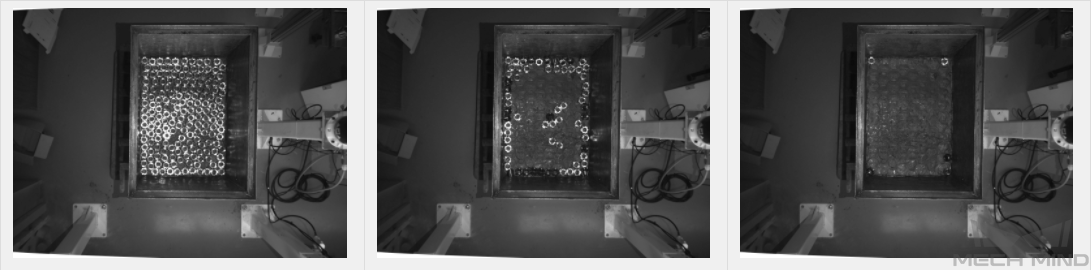
単一種類の金属部品を認識するプロジェクトで、50 枚の画像を取得します。対象物は、平置きと側置きなどを考慮して画像を取得します。位置に関しては、ボックスの中心、四角、コーナーにある状況を考えます。対象物同士の関係は、重なり合うことと並列になることを考慮します。実際に取得した画像は以下のようです:

-
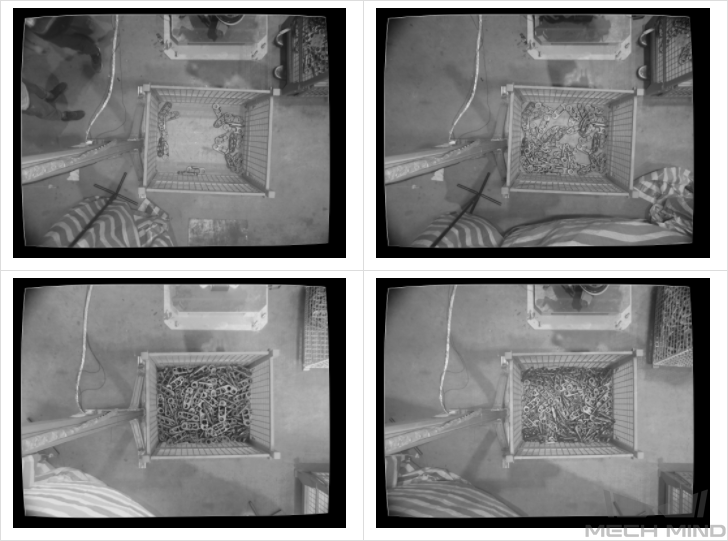
7 種類の日用品が混在するプロジェクトでは、商品を分類します。対象物の特徴を把握するためには、同じ対象物がさまざまな向きで配置されている状況や、複数種類の対象物が混在している状況を考慮する必要があります。同じ対象物に対して取得するデータ数=5×商品の種類数。複数種類の対象物が混在しているとき取得するデータ数=20×商品の種類数。対象物は、平置きと側置き、斜めの姿勢があります。位置に関しては、ボックスの中心、四角、コーナーに配置されていることがあります。対象物同士の関係は、重なり合いや並列、密集しているなどを考慮します。実際に取得した画像は以下のようです:
-
単一種類

-
多種類

-
-
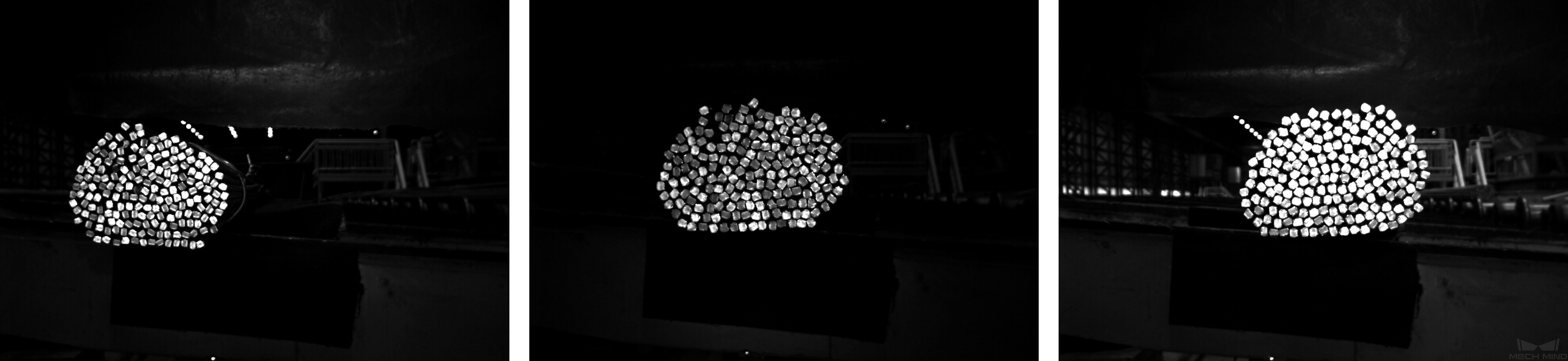
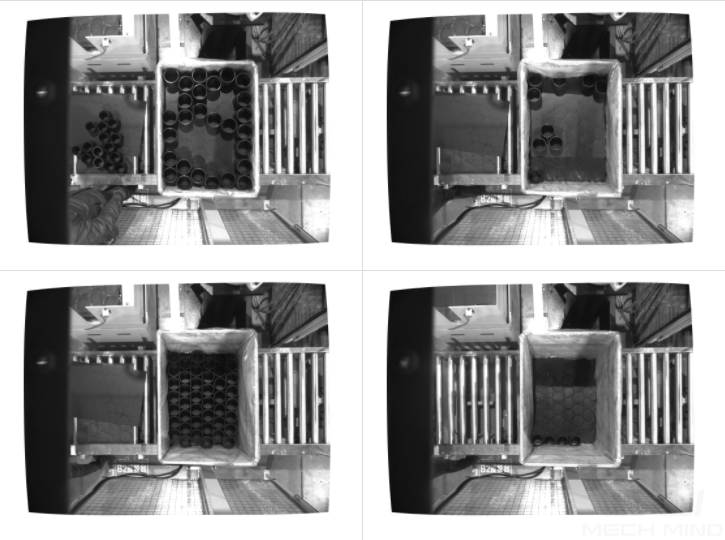
クローラシューのプロジェクトでは、複数の型番の対象物があるため、(30×モデル数)のデータを取得します。対象物の向きについては、上向きのみ考慮します。位置に関して、さまざまな高さにある物を撮影する必要があります。対象物同士の関係については、密集している状況に注意して撮影する必要があります。実際に取得した画像は以下のようです:
-
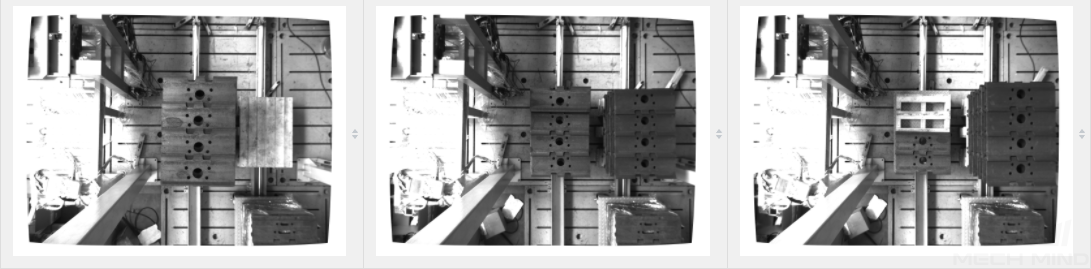
金属ワークのプロジェクトでは、ワークを 1 層配置します。50 枚の画像を取得します。対象物の向きについては、上向きだけを考慮して撮影します。位置に関しては、ボックスの中心、四角、コーナーにある状況を考えます。対象物同士の関係については、密集している状況に注意して撮影する必要があります。実際に取得した画像は以下のようです:
-
金属ワークのプロジェクトでは、ワークを複数層配置します。30 枚の画像を取得します。対象物の向きについては、上向きのみ考慮します。位置に関しては、ボックスの中心、四角、コーナー、また低中高層にある状況も考えます。対象物同士の関係については、密集している状況に注意して撮影する必要があります。実際に取得した画像は以下のようです:
画像分類
-
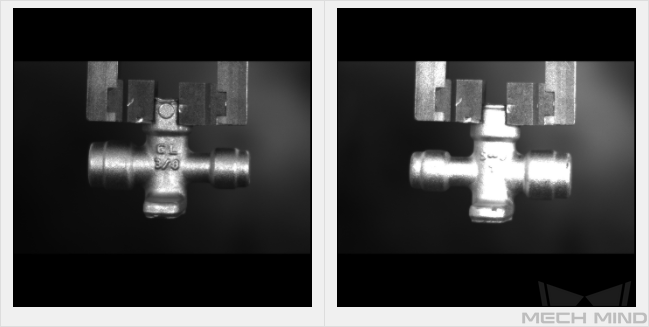
弁管プロジェクトでは、弁管の裏表を判別します。弁管の位置変動の幅が小さくて、表と裏の画像をそれぞれ15枚取得します。
-
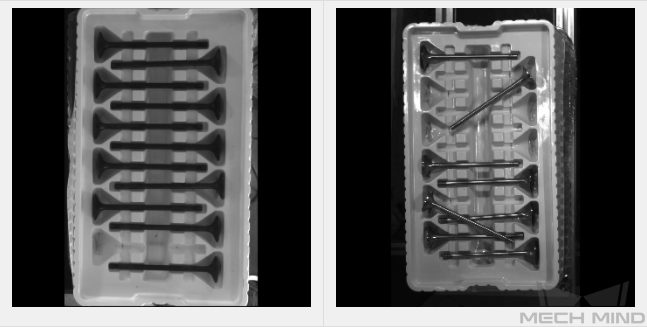
エンジンバルブの組み立てプロジェクトでは、対象物が一種だけあります。ワークがスロット内に正しく配置されているかどうかを判断します。 スロット外に配置されたエンジンバルブはさまざまな姿勢が考えられるため、さまざまな位置や角度のエンジンバルブの画像を 20 枚程度取得します。スロット内に放置された場合は、位置だけが異なるので 10 枚程度の画像を取得すれば十分です。
-
金属板のプロジェクトでは、2 種類の対象物があり、ワークのサイズにっよて分別します。異なる位置や異なる角度を考えて裏と表の画像をそれぞれ 20 枚取得します。