组合吸盘单独控制模式¶
组合吸盘单独控制模式支持单个吸盘单元为圆形或矩形,吸盘参数写在吸盘配置文件中, 配置文件为 json 文件格式,包含单个吸盘尺寸、组合吸盘行、列数、对应 DO 端口等信息。
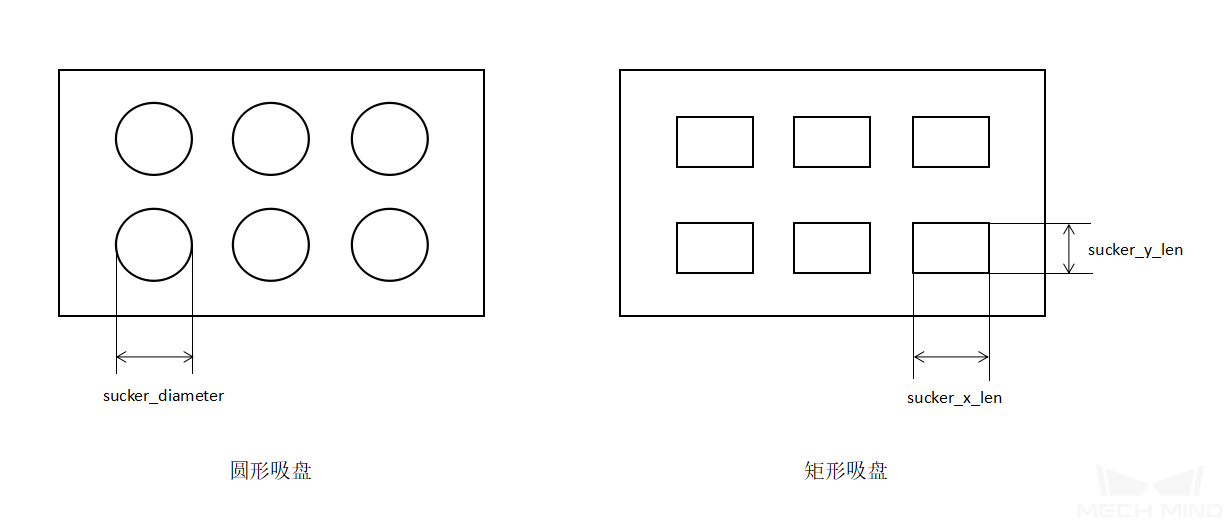
当吸盘为圆形时,sucker_diameter 为吸盘直径;
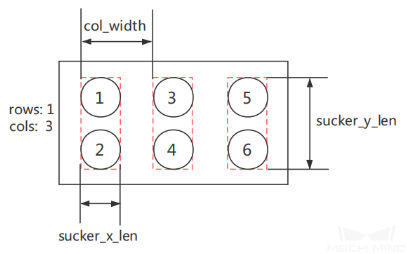
当吸盘为矩形时,sucker_x_len 与 sucker_y_len 分别表示单个吸盘单元在 tcp 坐标系下的 X 向和 Y 向上的长度。
注意
由 Mech-Viz 计算吸盘偏置时,将重新计算视觉抓取点。 在 IndependentCtrl 模式下,物体必须严格大于最小的吸盘单元, 否则软件将算不出视觉抓取点,而报“无视觉点”的错误。
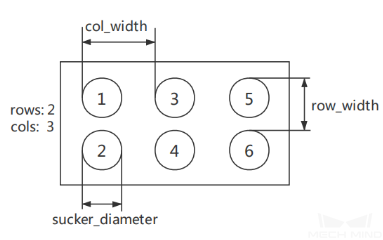
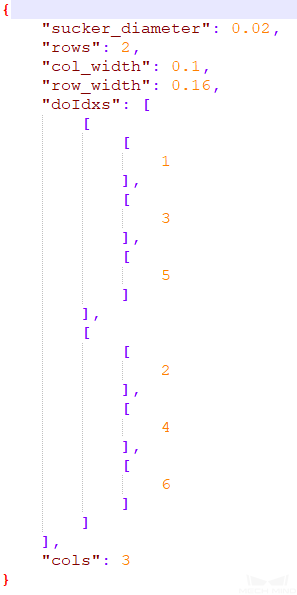
以 6 个圆形吸盘组合为例,当单个吸盘均可独立控制时,配置文件如图,doIdxs 中为实际控制的 DO 端口号。
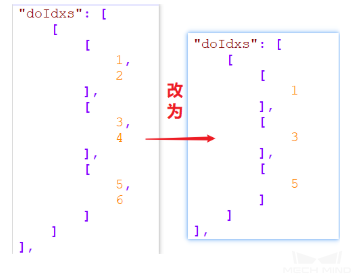
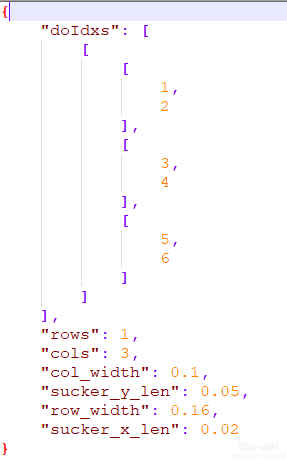
而实际应用中往往吸盘不能独立控制,可做一些小组合,以下图为例, 若只使用单个吸盘抓取箱子不符合实际,只能按红框将吸盘组合起来使用,则吸盘此时可看作最小单元为方形, 由两行三列变为一行三列,对应的配置文件如图。
注解
当前仅支持相邻的吸盘组合为矩形吸盘单元,不支持其他特殊的组合形式。
若实际应用中,DO 端口 1 可控制吸盘 1 和 2,DO 端口 3 控制吸盘 3 和 4,DO 端口 5 控制吸盘 5 和 6,则可编辑 json 文件如下。