开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
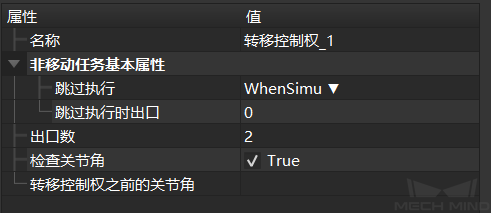
用于临时转移控制权给机器人并等待继续控制机器人。
详见 非移动任务基本参数 。
输出端口的个数。
在转移控制权之前是否检查机器人的关节角。
当勾选 检查关节角 选项时才会出现此选项,需要输入检查关节角所需的关节角数值。