开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
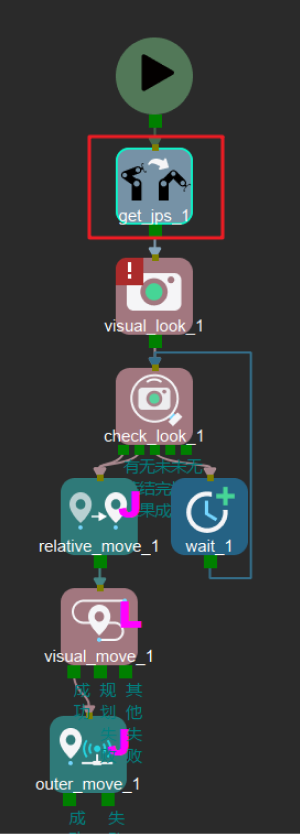
获取当前注册在 Mech-Center 中的机器人的关节角信息,并将其关节角信息同步到 Mech-Viz 中。
当 Mech-Viz 不完全控制机器人的所有运动时,使用此任务获取机器人自主运动后的关节角信息来维持控制。
详见 非移动任务基本参数
视觉识别 触发相应的 Mech-Vision 工程前,通过 获取关节位置 来获取真实机器人的关节角信息,将其更新至 Mech-Viz 中作为规划的起始位置。