夹具偏置介绍
本节介绍夹具偏置的概念,以及偏置的作用和缺点。
偏置的概念
夹具偏置是指夹具的一种结构形式,下文将分两种情况介绍夹具偏置。
-
水平方向上的坐标偏置
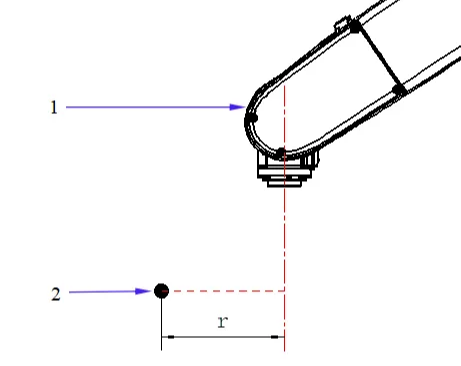
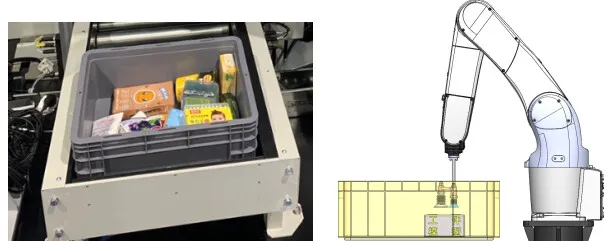
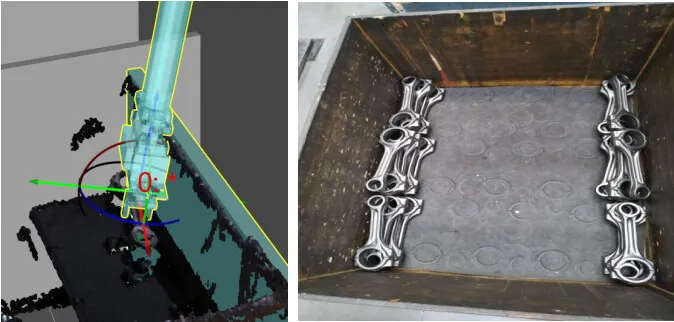
机器人抓取工件时,机器人法兰位姿与抓取点在铅锤方向有一定的水平距离(偏置半径)。如下图所示,1 为机器人,2 为抓取点,r 为偏置半径。
-
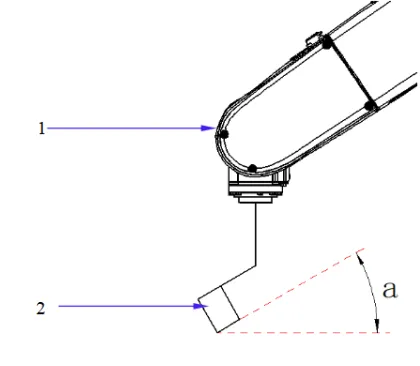
TCP朝向(角度)的偏置
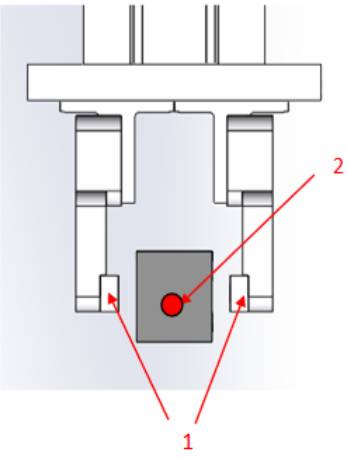
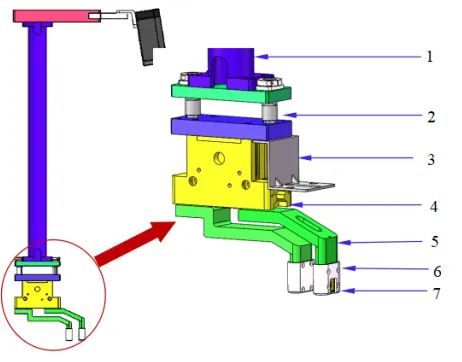
对于某些场景,夹具末端的抓取面也可以与机器人法兰安装面呈一定角度,以增大偏置幅度。如下图所示,1 为机器人,2 为夹爪。
偏置的作用
偏置的缺点
设置夹具偏置时还需考虑以下缺点,并进行抓取验证。
机器人可用负载变小
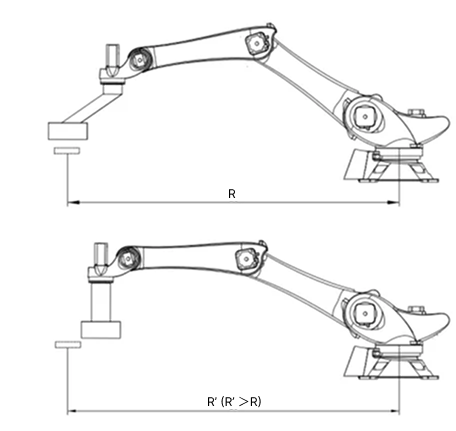
需根据机器人本体的负载曲线图以及夹具偏置量检查机器人实际可用负载,确保偏置后的实际可用负载满足项目抓取要求。
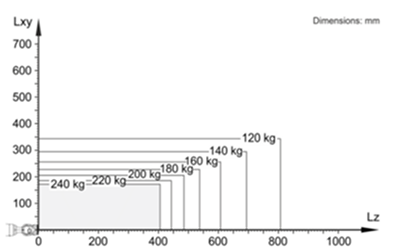
下图为某机器人末端负载曲线变化图,其中 Lxy 表示法兰坐标系下沿 X/Y 轴的偏置,Lz 表示法兰坐标系下沿 Z 轴的偏置。
当偏置大于 250 mm 后,机器人负载衰减严重。但若偏置小于 170 mm,沿 Z 轴增加至 400 mm,仍能保持可用负载。