视觉方案设计
标定板选型
标定板常用于内参检查与外参标定,会影响标定的精度和稳定性。梅卡曼德提供三种型号的标定板,详细信息请参考标定板。
在实际的项目中,请参考下表,根据相机型号和实际的工作距离选择合适的标定板。
选择相机安装方式
你可以根据相机与机器人的相对位置以及整体节拍的需要,确定相机安装方式。下表介绍了两种常见的相机安装方式。
安装方式 |
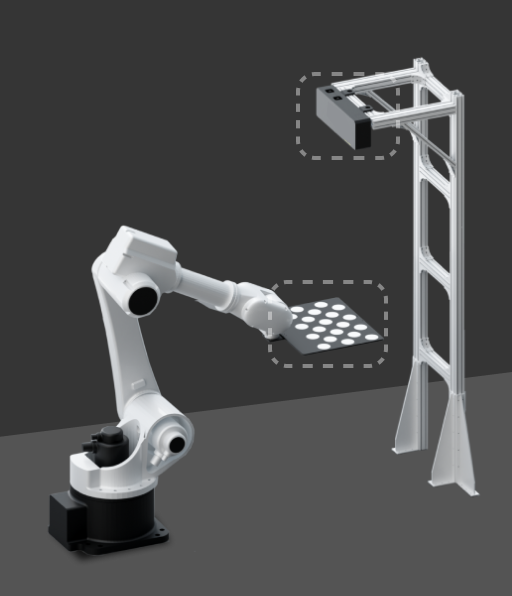
Eye to hand(ETH) |
Eye in hand(EIH) |
|---|---|---|
说明 |
相机安装于独立的相机支架上。 |
相机安装于机器人末端,随机器人一同运动。 |
示意图 |
|
|
特点 |
|
|

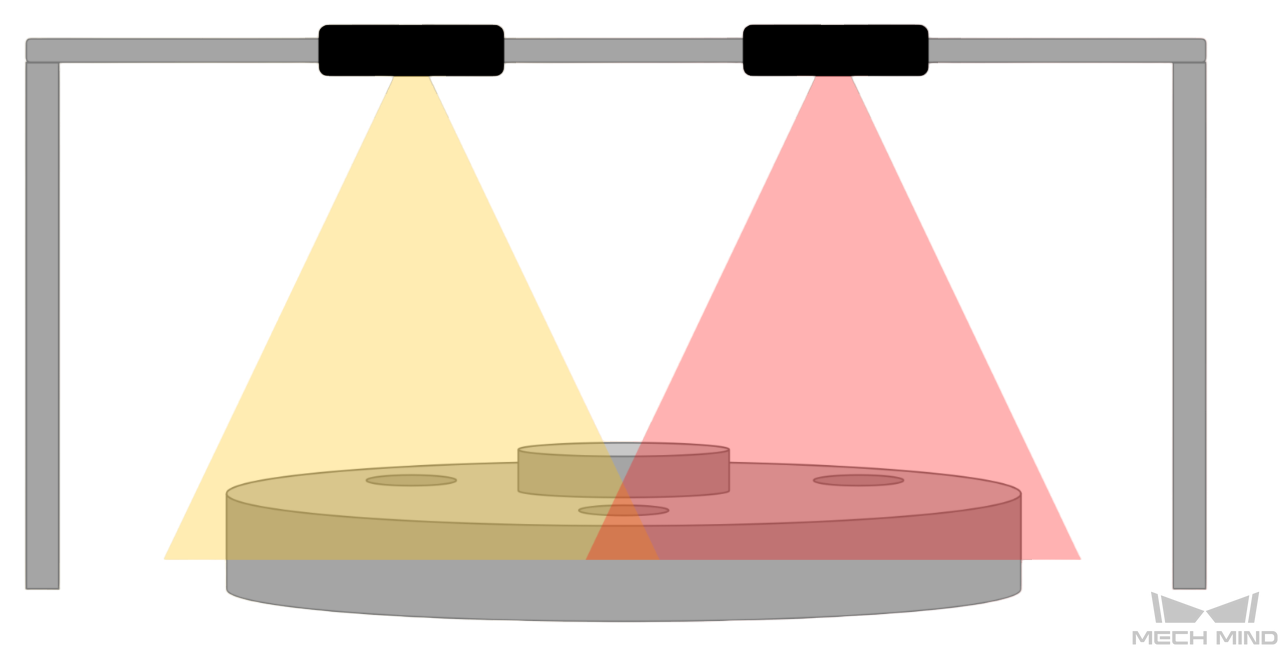
此外,为了扩大相机视野、提高重叠视野的点云质量,项目也可能安装多个相机,称为Eye to eye(ETE)安装方式。
无论是采用何种相机安装方式,都需要通过相机安装支架来完成安装。关于相机安装支架的设计说明,请参考相机安装支架设计。
工控机选型
梅卡曼德工控机提供了梅卡曼德软件所需的标准运行环境,可以将软件的功能和性能最优化。
请根据工控机的应用场景、技术参数和性能技术指标,选择工控机型号。各型号工控机的性能技术指标如下表所示。
| 技术指标 | 应用场景 | Mech-Mind IPC STD | Mech-Mind IPC ADV | Mech-Mind IPC PRO |
|---|---|---|---|---|
支持同时运行的Mech-Vision工程数量 |
标准接口/Adapter通信场景(无路径规划步骤) |
≤5 |
≤5 |
≤5 |
标准接口/Adapter通信场景(带路径规划步骤) |
≤5 |
≤5 |
≤5 |
|
主控通信场景(使用Mech-Viz软件) |
≤5 |
≤5 |
≤5 |
|
3D视觉方案使用3D匹配技术 |
≤5 |
≤5 |
≤5 |
|
3D视觉方案使用3D匹配和2D深度学习技术 |
≤2 |
≤2 |
≤4 |
|
单个方案支持连接的相机数量 |
≤2 |
≤2 |
≤2 |
|
单个方案支持加载的深度学习模型数量 |
≤5(CPU) |
≤5(GPU) |
<8(GPU) |
|
单个方案支持连接的机器人数量(主控通信) |
1 |
1 |
1 |
|
单个方案支持开启的通信方式数量 |
1 |
1 |
1 |
|
单个方案支持同时连入的客户端数量(标准接口/Adapter通信) |
≤4 |
≤4 |
≤4 |
|
如果你使用自有设备(笔记本或PC)作为工控机(以下简称“自有工控机”),请参考自有工控机设置确保自有工控机满足系统配置要求,并完成相应设置。
确定是否使用深度学习
请参考选择深度学习方案章节确定该视觉方案是否需要使用深度学习。
当视觉识别过程中,3D匹配方法无法很好解决以下问题时,需考虑使用深度学习:
| 序号 | 传统方法劣势场景 | 图示 |
|---|---|---|
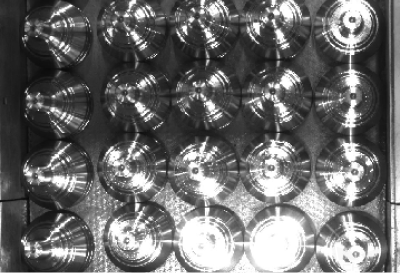
1 |
工件表面高度反光,点云质量较差。 |
|
2 |
工件点云上的曲面特征较少,特征点云点数较少。 |
|
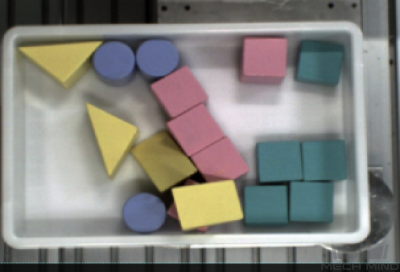
3 |
工件之间有序摆放,且紧密贴合时,点云聚类效果较差。 |
|
4 |
工件特征仅存在于彩色图上,工件点云特征丢失。 |
|
5 |
项目对视觉节拍的要求较高。例如工件数量多时,点云模板匹配时间较长。 |
|