轮廓测量仪入门教程
1. 开箱检查

2. 确认接口及指示灯
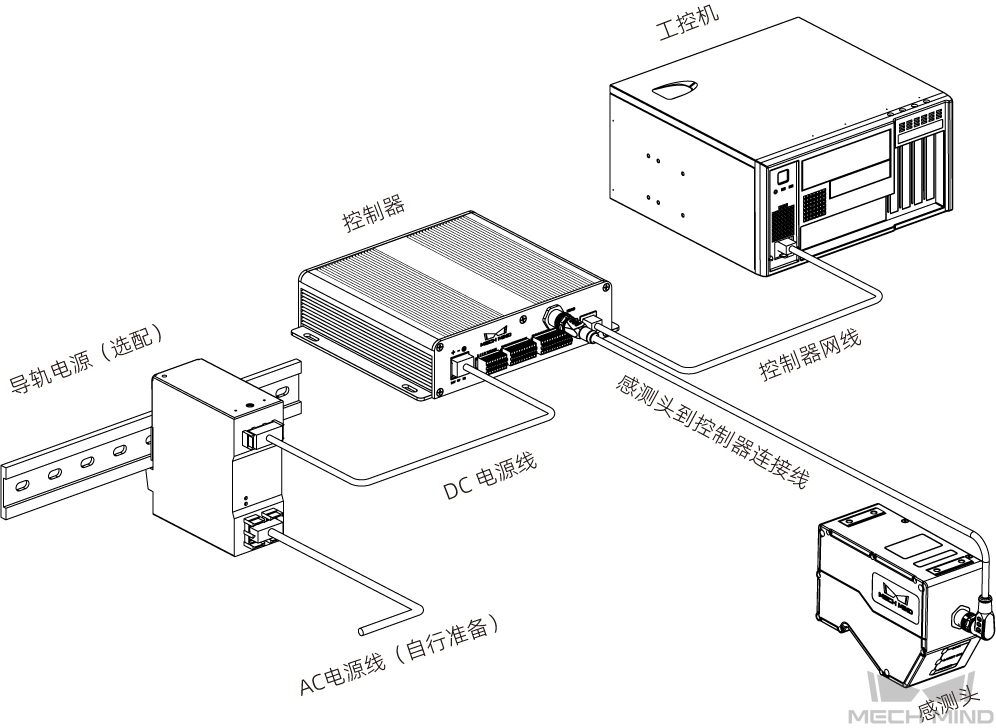
轮廓测量仪由感测头和控制器组成。以下小节分别介绍轮廓测量仪的感测头和控制器。
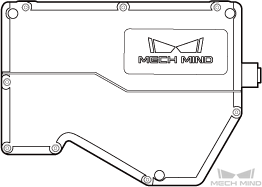
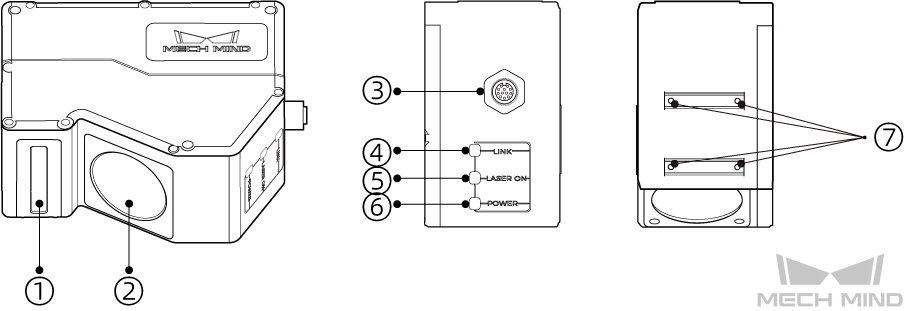
2.1. 感测头
请对照以下图示及表格,确认感测头各部分的功能。
| 序号 | 名称 | 功能 |
|---|---|---|
① |
激光发射器 |
发射激光线。 |
② |
感光单元 |
接收目标表面反射的激光线。 |
③ |
控制器接口 |
用于连接控制器。 |
④ |
LINK指示灯 |
熄灭:网络未连接 |
绿色闪烁:数据传输中(2.5Gbps) |
||
黄色闪烁:数据传输中(10/100/1000Mbps) |
||
⑤ |
LASER ON指示灯 |
熄灭:激光未发射 |
常亮:激光发射中 |
||
⑥ |
POWER指示灯 |
熄灭:未接通电源 |
绿色常亮:电压正常 |
||
⑦ |
遮光装置安装孔 |
用于在感测头上安装遮光装置。 |
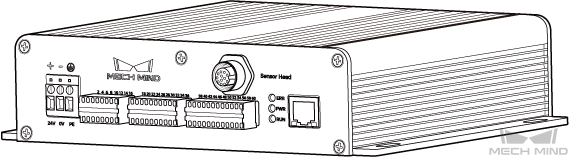
2.2. 控制器
请对照以下图片及表格,确认控制器各部分及指示灯的功能。

| 序号 | 名称 | 功能 |
|---|---|---|
① |
感测头接口 |
用于连接感测头。 |
② |
RUN指示灯 |
亮起:采集图像中 |
熄灭:图像未采集 |
||
③ |
PWR指示灯 |
绿色常亮:电压正常 |
熄灭:电压异常或未接通电源 |
||
④ |
ERR指示灯 |
闪烁:发生错误 |
熄灭:工作正常 |
||
⑤ |
电源接口 |
24V:+24V直流输入 |
0V:0V直流输入 |
||
PE:接地 |
||
⑥ |
输入信号端口 |
详见输入信号端口。 |
⑦ |
输出信号端口 |
详见输出信号端口。 |
⑧ |
编码器信号端口 |
用于连接编码器。详见编码器信号端口。 |
⑨ |
网络指示灯 |
闪烁:数据传输中 |
熄灭:无数据传输 |
||
⑩ |
RJ45网口 |
用于连接网线的RJ45插头。 |
3. 安装与连接
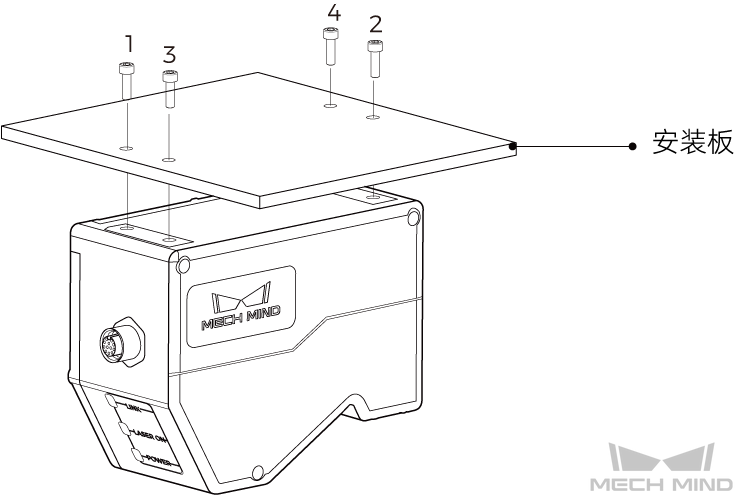
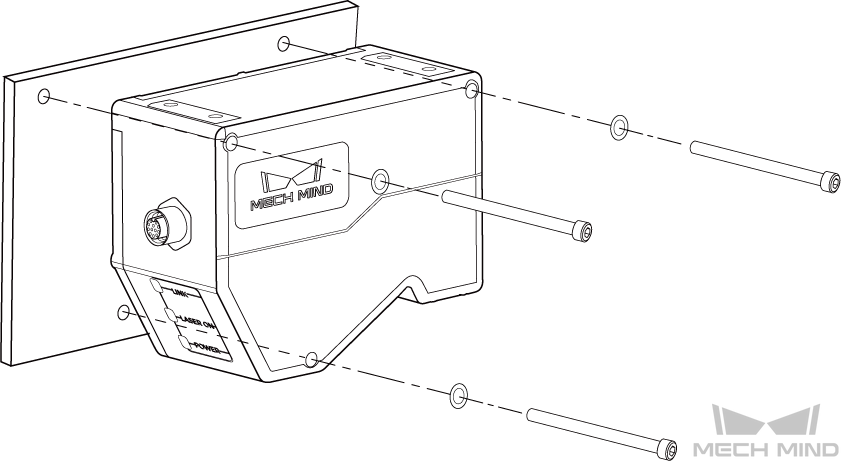
3.1. 安装感测头
3.1.1. 安装注意事项
安装感测头前,请确认以下注意事项:
-
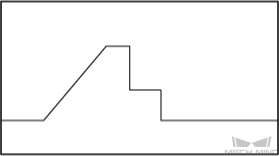
目标物体的形状可能导致测量范围中产生死角。安装前需评估死角对检测的影响。本产品的激光基本呈平行状态,受死角影响较小。
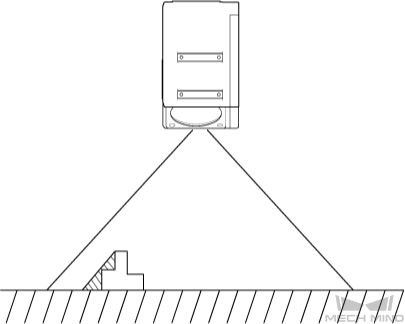
阴影表示死角范围
测量画面
-
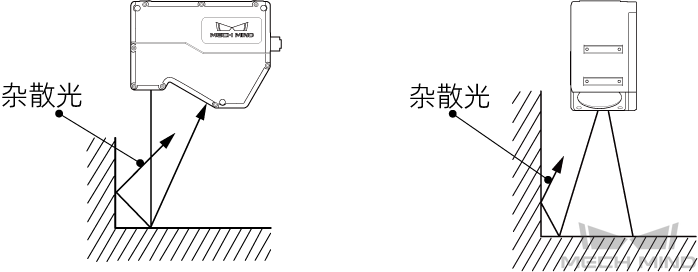
安装时,需保证目标物体反射的线激光不被遮挡。


错误
正确
-
激光经墙面等周围物体反射后,会产生杂散光。安装前需评估杂散光对测量的影响。
-
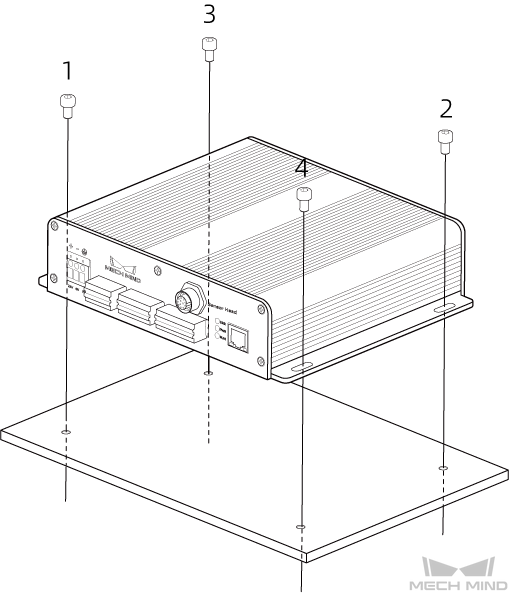
为保证感测头散热良好,请将其安装在至少有一面面积达到200平方厘米的金属板上。
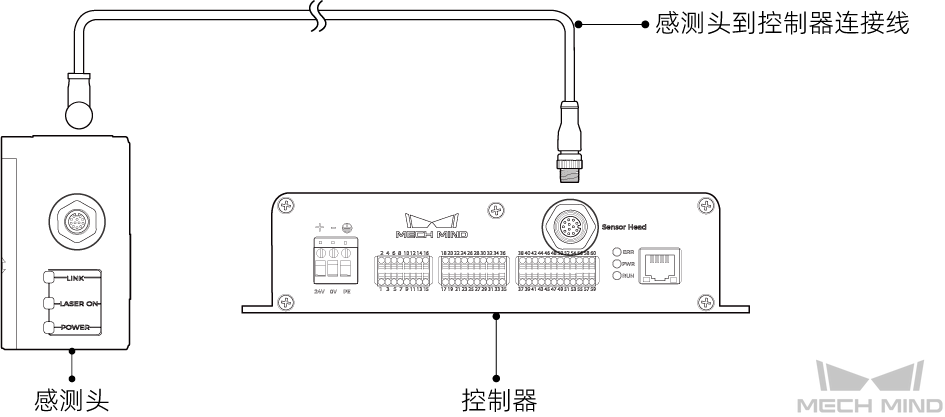
3.2. 连接感测头与控制器
将感测头到控制器连接线的弯头插入感测头的控制器接口,直头插入控制器的感测头接口。
-
将感测头到控制器连接线航插头的凸起对准航插接口的豁口插入。

-
拧紧紧固螺母,推荐扭矩为0.7N·m。拧紧后,约有2mm间隙。

|
请妥善固定线缆,防止拉扯而损坏线缆或插头。 |
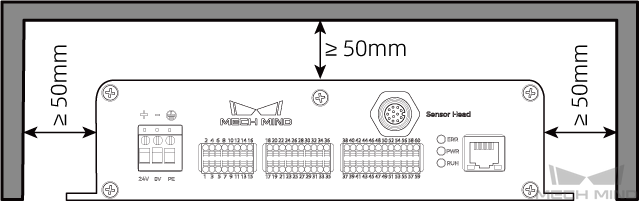
3.3. 安装控制器

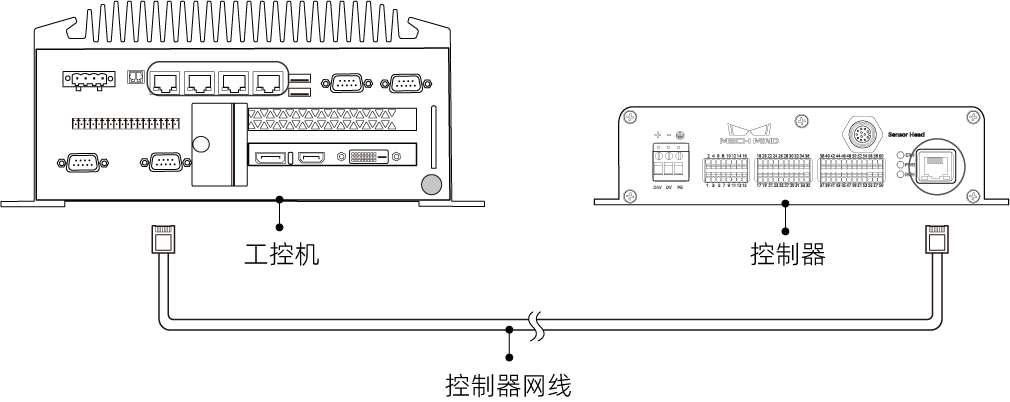
3.4. 连接控制器和工控机
将控制器网线一端插入控制器的RJ45网口,另一端插入工控机的RJ45网口。
|
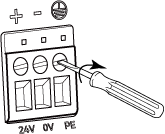
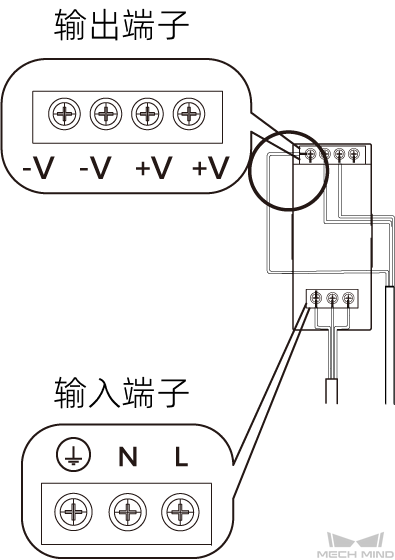
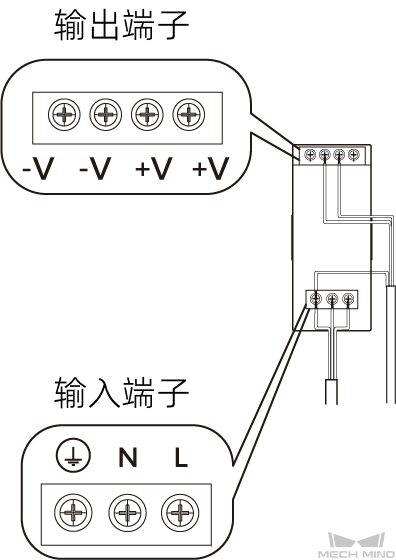
3.5. 连接控制器和导轨电源
|
本节的导轨电源为梅卡曼德提供的导轨电源。如您自行准备导轨电源,请查看对应的说明书进行连接。 |

|
3.6. 连接控制器和外部设备
可将PLC、编码器等外部设备连接至控制器的相应端口,为轮廓测量仪提供数据采集的触发信号,或为外部设备提供数据采集状态信号。
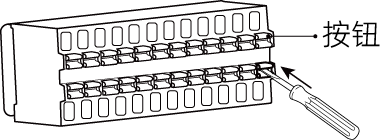
确认需连接的端口后,请执行以下步骤将线缆连接至控制器的相应端口:
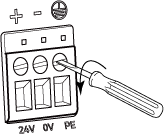
-
选择需要插入线缆的接线孔,使用一字螺丝刀按住接线孔上/下方的按钮。
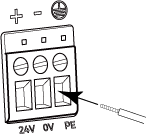
-
将线缆插入接线孔中,再移开一字螺丝刀。
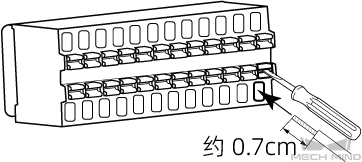
-
线缆的裸露部分应为约1cm长。如裸露部分过短,可能导致接线失败。
-
线缆的裸露部分为散线时,请先将其拧为一股线,再进行连接。
-
-
轻轻拽动线缆,如线缆未被拉出来,则连接成功。否则,请重新连接线缆。
拽动线缆时,应避免用力过大,否则将导致线缆被拽出,裸露部分断裂。
如需拔出线缆,请使用一字螺丝刀按住接线孔上/下方的按钮,然后拔出。
轮廓测量仪硬件的安装和连接已完成。接下来将介绍如何使用Mech-Eye Viewer连接轮廓测量仪,并控制轮廓测量仪采集图像。
4. 下载并安装Mech-Eye SDK
你可以从梅卡曼德下载中心下载Mech-Eye SDK安装包。
解压安装包后,双击安装文件即可安装Mech-Eye SDK。更多Mech-Eye SDK下载、安装、升级、卸载等信息可参考Mech-Eye SDK安装指南。
5. 设置IP地址
连接轮廓测量仪前,需确保以下两个IP地址唯一,且在同一网段。
-
轮廓测量仪的IP地址
-
与轮廓测量仪相连的电脑网口的IP地址
轮廓测量仪出厂时的默认IP设置如下:
IP地址分配方式 |
静态 |
|---|---|
IP地址 |
192.168.23.203 |
子网掩码 |
255.255.255.0 |
网关 |
0.0.0.0 |
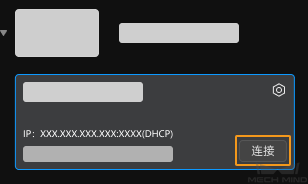
请按照以下步骤设置轮廓测量仪的IP地址:
-
双击打开Mech-Eye Viewer。
-
选择待连接的轮廓测量仪,单击
 。
。
7. 采集数据
轮廓测量仪通过逐行扫描物体获取数据。每扫描一行将采集一张原始图像。从原始图像的每列像素中提取一个点(提取点)组成轮廓线。最后,通过拼接多行轮廓线生成强度图、深度图和点云。
Mech-Eye Viewer提供两种数据采集模式:
-
轮廓模式:调节轮廓线相关的参数,以获取符合要求的轮廓线。
-
扫描模式:调节图像和点云相关的参数,以获取符合要求的强度图、深度图和点云。
7.1. 示例场景
以下内容基于该示例场景编写:
-
由Mech-Eye Viewer触发数据采集。
-
由编码器触发每一行的扫描。
-
目标物体相对于轮廓测量仪单向运动。
-
目标物体为金属块,尺寸约为80 × 35 × 8mm。
7.2. 获取轮廓线
请执行以下步骤获取符合要求的轮廓线:
-
单击
 ,采集一次原始图像。
,采集一次原始图像。 -
单击采集按钮下方的数据类型,即可在原始图像与轮廓线之间进行切换。
-
原始图像:用于调节激光线的亮度。
-
轮廓线:用于查看轮廓线提取结果,如轮廓线的空缺情况。
-
-
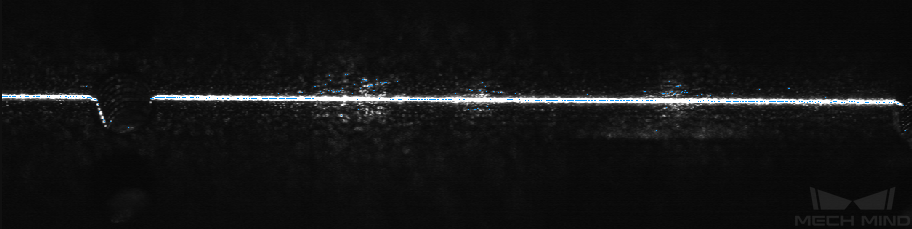
判断原始图像中的激光线亮度是否符合要求:激光线中心的像素灰度值应在200~255的范围内。
过暗
合适
过亮
在原始图像的右下角,可查看光标所在像素的灰度值。如不显示,请勾选视图菜单中的图像信息框。
-
如激光线亮度不符合要求,请在右侧参数标签页中调节以下参数。
金属块为单一材质的物体,因此,亮度设置分组下的曝光模式参数选择固定曝光即可。此时,调节曝光时间参数即可调节原始图像中激光线的亮度。
-
根据激光线亮度,调节曝光时间参数。
-
如激光线过暗,请将曝光时间参数调大。
-
如激光线过亮,请将曝光时间参数调小。
-
-
再次采集原始图像,查看激光线的亮度。如有需要,继续调节,直至激光线亮度符合要求。
如被拍摄物体包含多种材质或多种颜色,可使用HDR曝光模式。更多信息请参考曝光模式。
-
-
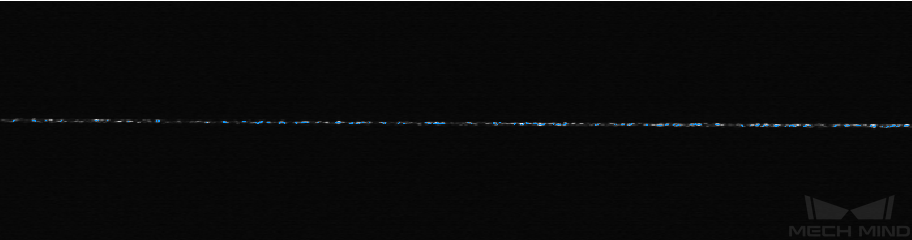
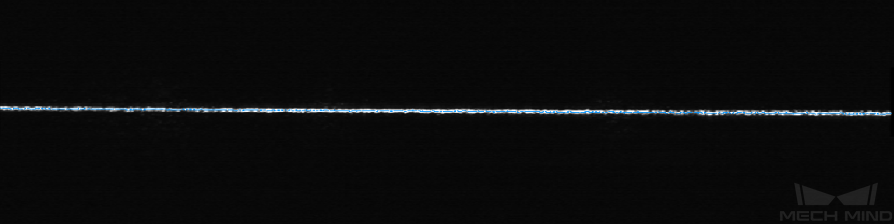
单击采集按钮下方的轮廓线,检查轮廓线的质量。
轮廓线应完整,基本无空缺。
轮廓线完整
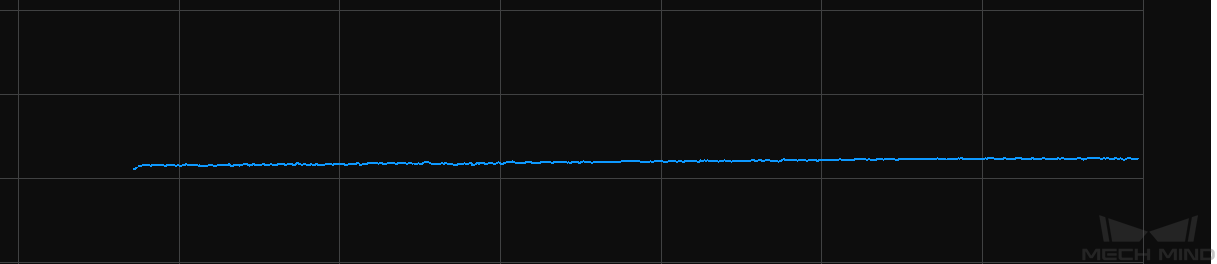
轮廓线不完整
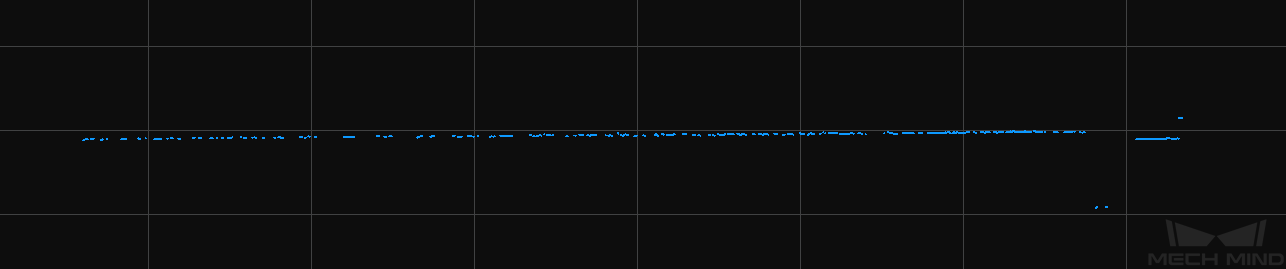
如轮廓线不符合要求,请继续调节原始图像中激光线的亮度。
7.3. 获取强度图、深度图和点云
轮廓模式获取的轮廓线是生成强度图、深度图和点云的前提。
确认轮廓线能满足要求后,请执行以下步骤获取强度图、深度图或点云。
-
单击右上方的扫描模式按钮切换至扫描模式。
-
根据实际场景设置触发扫描相关的参数:
-
由Mech-Eye Viewer触发数据采集时,将触发设置分组下的数据采集触发源参数设置为软触发。
-
由编码器触发每一行的扫描时,将触发设置分组下的行扫描触发源参数设置为编码器。
-
目标物体相对于轮廓测量仪单向运动时,根据编码器实际输出的信号设置触发方向参数为A相在前或B相在前。
-
-
单击
,轮廓测量仪根据扫描行数参数的设置值完成当前轮次的数据采集,并生成强度图、深度图和点云。 -
单击采集按钮下方的数据类型,查看强度图、深度图或点云。
更多关于采集数据和数据类型的信息,详见采集与查看数据。 -
判断数据质量。
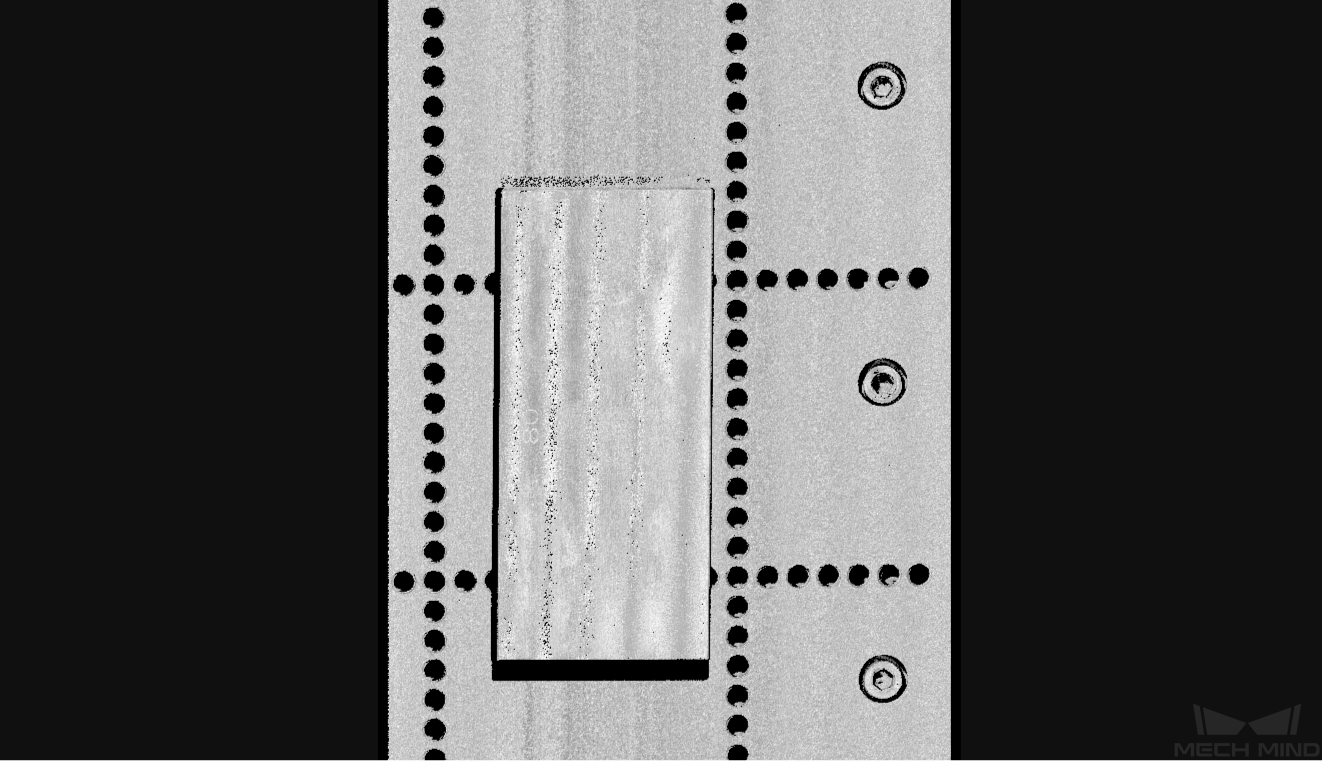
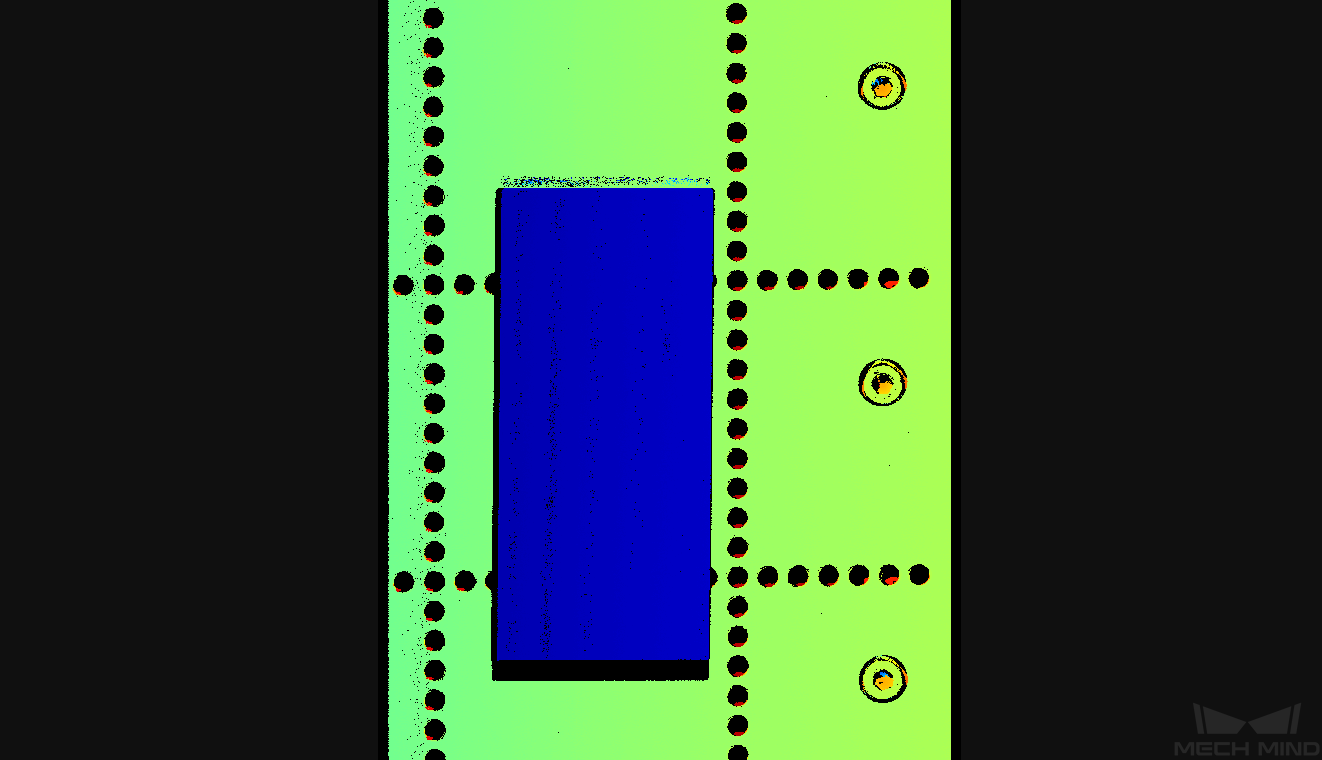
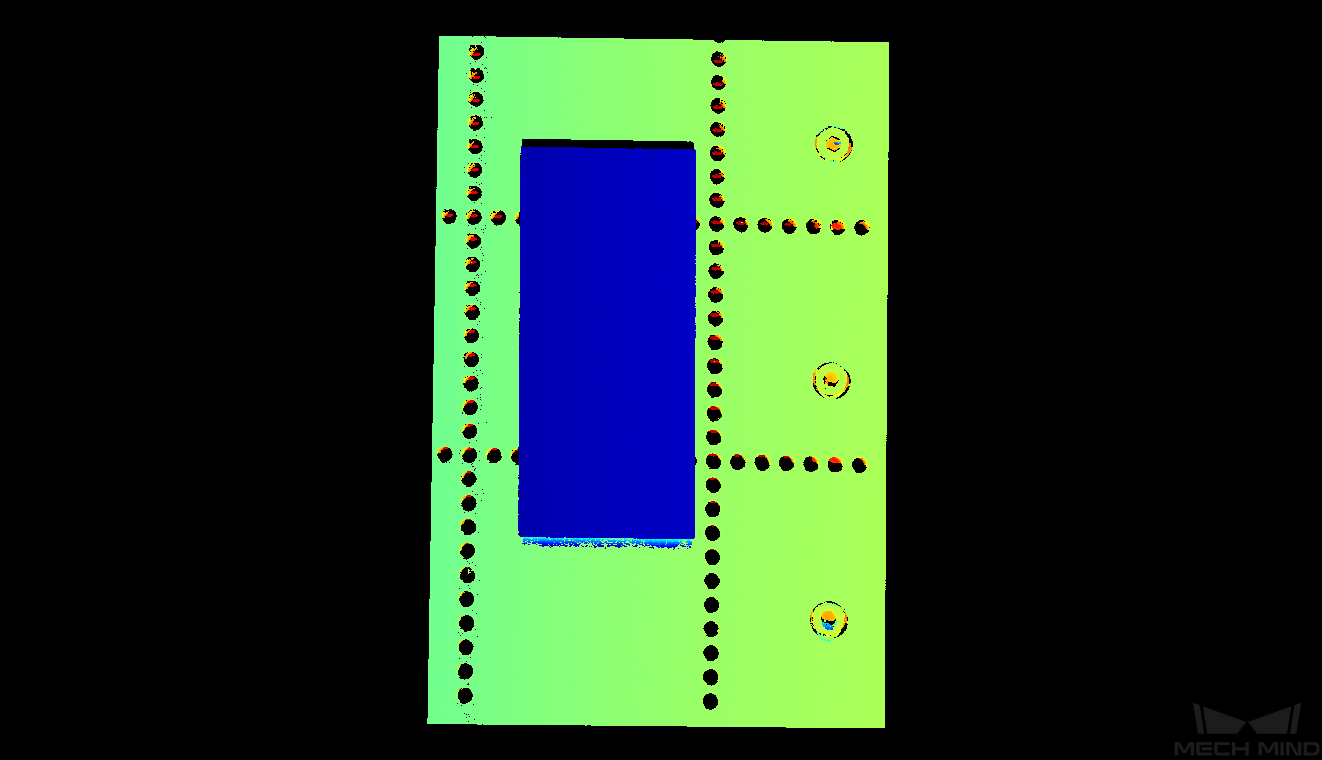
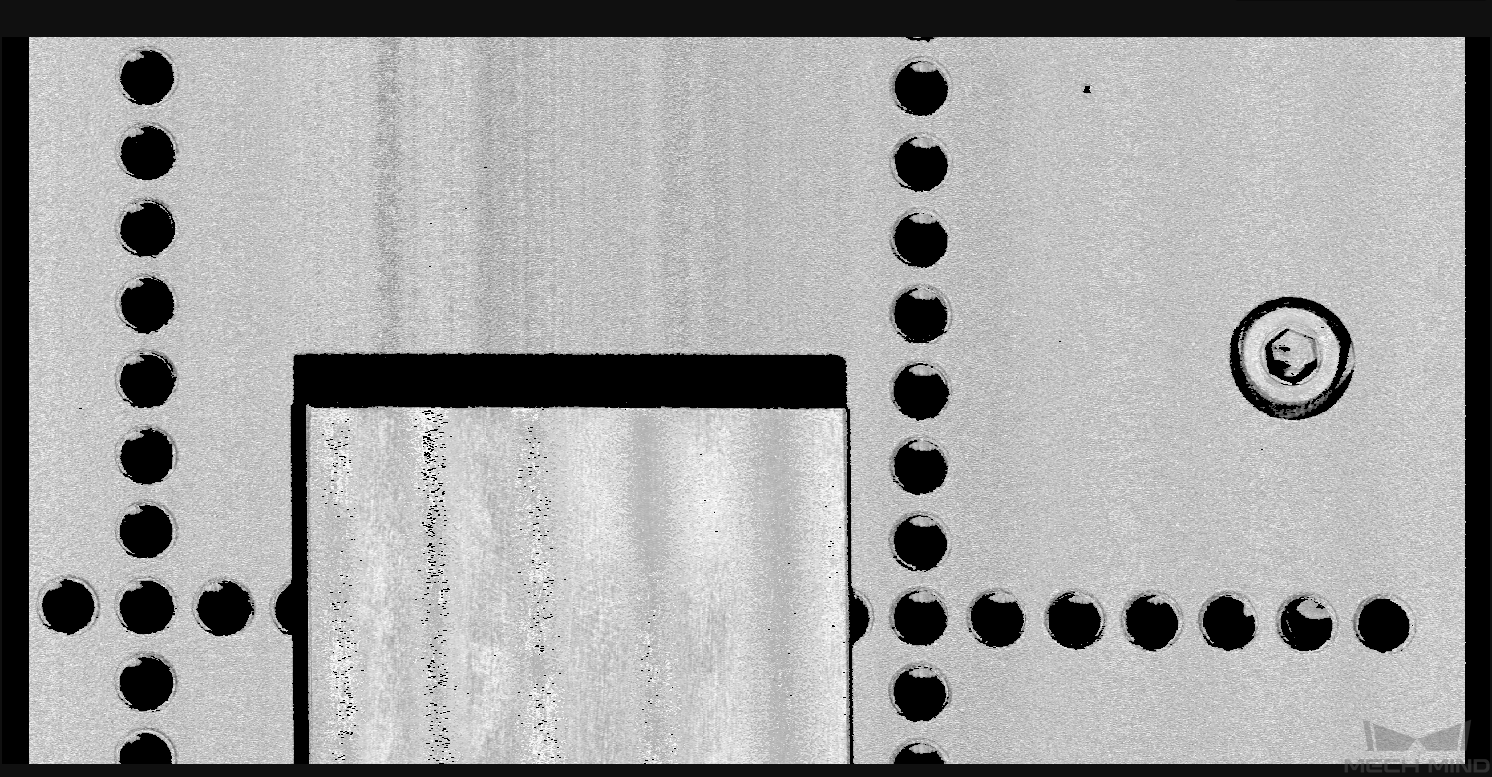
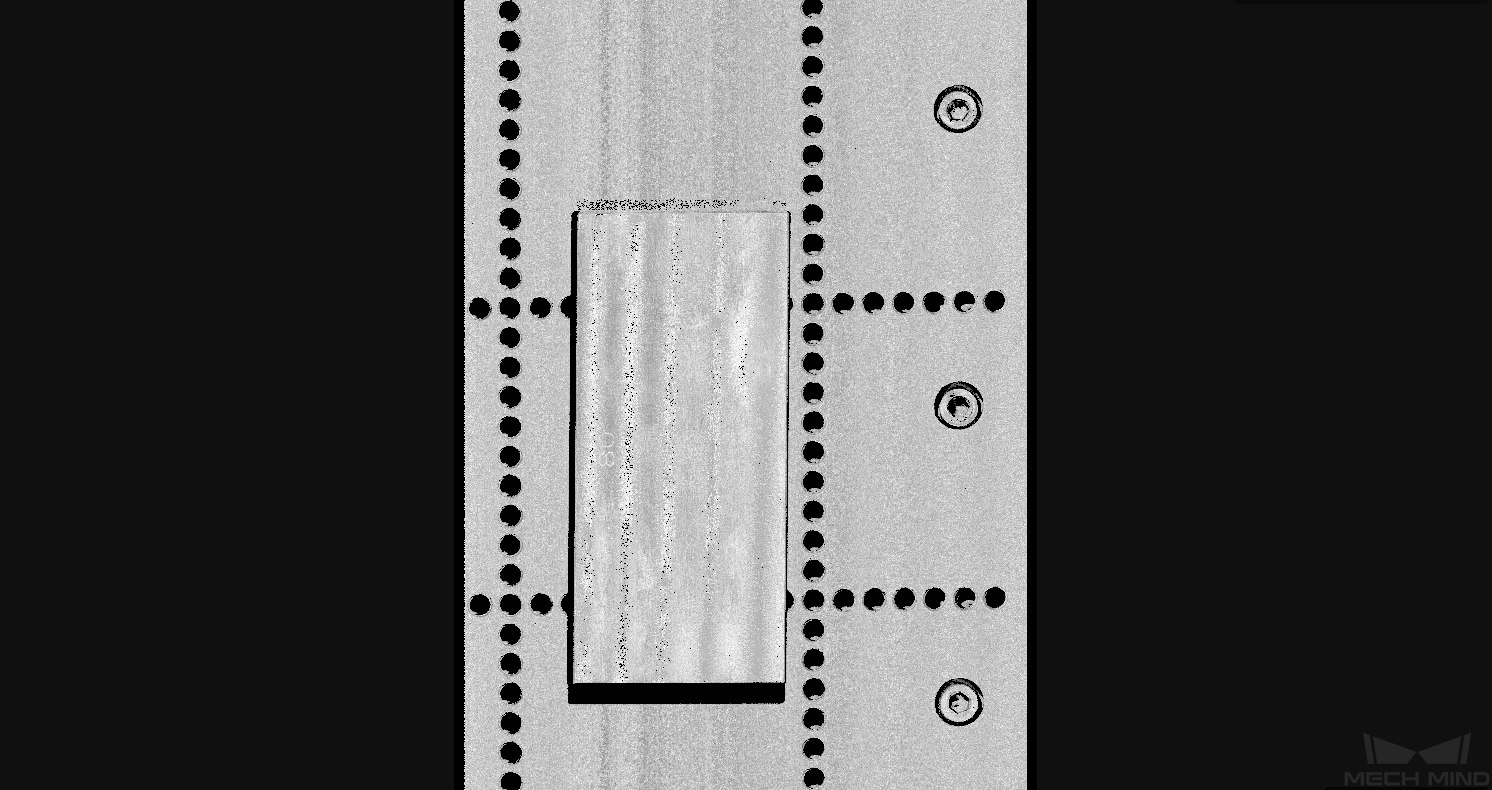
强度图、深度图和点云中,目标物体对应的数据完整。可参考下图判断数据质量。
强度图
深度图
点云
8. 使用数据
通过Mech-Eye Viewer获取的强度图、深度图和点云,可直接保存至本地,也可使用Mech-Vision或第三方机器视觉软件进行后续的处理和计算。
-
保存数据:单击数据采集区的
 ,设置保存路径,勾选需要保存的数据类型,再单击保存。
,设置保存路径,勾选需要保存的数据类型,再单击保存。 -
在Mech-Vision中使用数据:请参考视觉系统教程,学习搭建包含Mech-Vision在内的整套视觉系统。
-
在第三方机器视觉软件中使用数据:通过Mech-Eye API或GenICam接口,可将轮廓测量仪获取的数据传输至第三方软件。