対象物位置姿勢をティーチングする
複数の方法で対象物把持を試行して対象物を指定姿勢で配置したい場合、Mech-Viz で配置位置姿勢をティーチングすればいいです。
操作手順
Vizティーチング通信方法と標準インターフェース通信方法とは、対象物位置姿勢をティーチングする流れは異なります。それぞれのガイドに従って実行してください。
Vizティーチング通信方法
以下のように実行してください。
-
構築したワークフローにより、Vizティーチング方法でロボットの把持をガイドできることを確認します。
-
ロボットが対象物を把持して目標位置に到達します。
-
仮想ロボットとロボット実機の位置姿勢が同期していることを確認します。同期していない場合、ツールバーのロボットを同期させるボタンをクリックしてください。
-
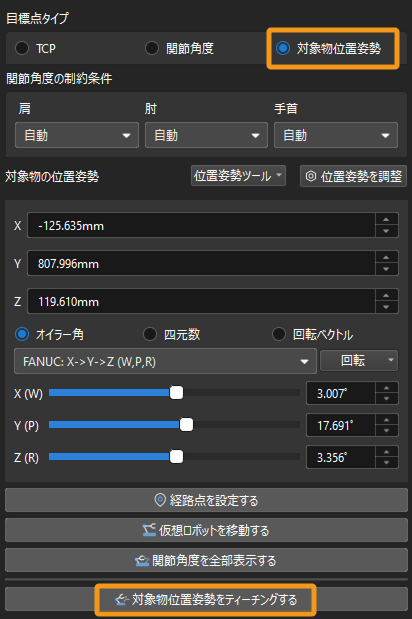
ワークフローでは、配置点とする「移動」ステップを選択し、パラメータパネルの対象物位置姿勢をティーチングするボタンをクリックします。
-
確認ウィンドウのはいをクリックすると、目標点タイプは自動的に対象物位置姿勢になります。これで対象物位置姿勢のティーチングは完了します。
標準インターフェース通信方法
以下のように実行し、ロボットプログラムと Mech-Viz ワークフローの経路点を同期させてください。
-
ロボット把持プログラムを実行し、Mech-Viz から出力した経路に沿って対象物を把持できたことを確認します。
-
手動でロボットが対象物を把持して目標位置に移動させます。
-
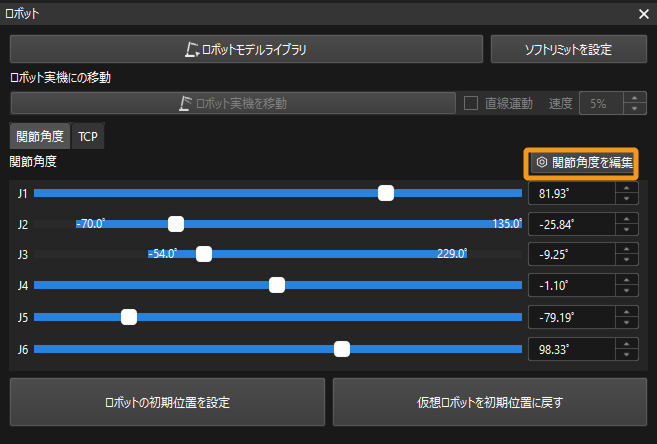
ロボットパネルの関節角度を編集をクリックして、表示されたウィンドウにティーチペンダントから読み取ったロボット関節角度を入力し、仮想ロボットとロボット実機の位置姿勢が一致することを確認します。
-
ワークフローでは、配置点とする「移動」ステップを選択し、パラメータパネルの対象物位置姿勢をティーチングするボタンをクリックします。
-
確認ウィンドウのはいをクリックすると、目標点タイプは自動的に対象物位置姿勢になります。