3D方法による点群エッジを推定
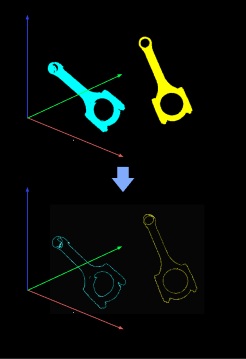
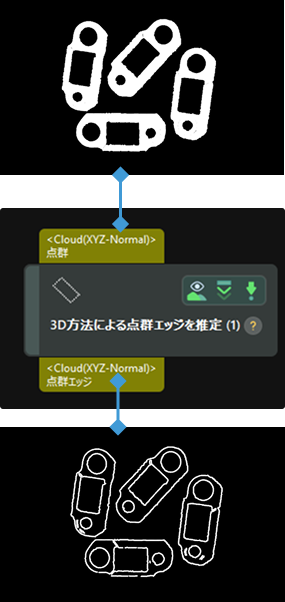
点群エッジ抽出の処理フロー
以下に、点群エッジ抽出の処理フローを示しています。
-
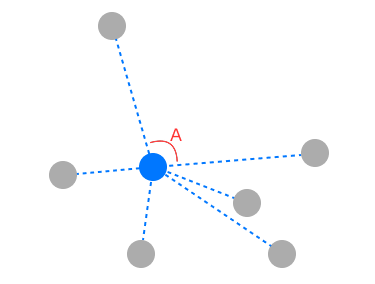
近傍点の検索設定 に基づいて、ある1点の周囲にある複数の点を検索し、該当点とそれらの点を結線します。
-
隣接する2本の線分が作る最大角度を計算し、設定された 角度のしきい値 と比較します。最大角度がしきい値を超える場合、その点はエッジ点と判定されます。
下図のように、青い点が空間中のある点で、灰色の点がその近傍点です。このとき、角度のしきい値 が90°に設定されており、が最大角度∠A が90°を超える場合、青い点はエッジ点と判定されます。
以下に、各パラメータの詳細を説明します。
パラメータ説明
エッジ推定設定
- 角度しきい値
-
パラメータ説明:このパラメータは、ある点がエッジ点かどうかを判定するために使用されます。ある点と、検索された複数の点との間に引かれた線分のうち、隣接する2本の線分が形成する最大角度がこの値を超える場合、その点はエッジ点と判断されます。
初期値:90°
調整アドバイス:初期値のまま使用することを推奨します。
近傍点の検索設定
- 近傍検索のタイプ
-
パラメータ説明:このパラメータは、近傍点を検索するための方法を選択するために使用されます。
オプション:KNN、半径
-
KNN:ある点に対して、空間内で最も近いK個の点を検索する手法です。この方法を選択した場合は、近傍点の数 パラメータを設定してKの値を指定する必要があります。推奨値は初期値の20です。点群エッジを計算する際、この方法は処理速度が速いです。
-
半径:ある点を中心に、指定した半径以内に存在する点を検索する手法です。この方法を選択した場合は、近傍点の検索半径 パラメータを設定して、検索の範囲を指定します。推奨値は初期値の5.000mmです。
初期値:KNN
調整アドバイス:初期値のまま使用することを推奨します。
-