Mech-Eye SDK 2.3.4 更新説明
以下では、Mech-Eye SDK 2.3.4 バージョンの新機能や機能最適化、問題修復について説明します。
Mech-Eye Viewer
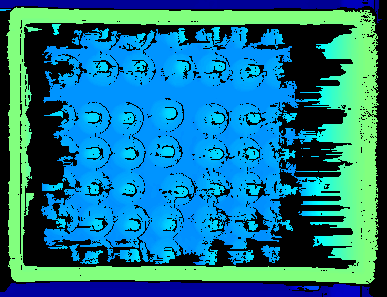
DEEP と LSR S、LSR L:反射物のコーディングモードに値を追加し、より完全な深度データが取得可能
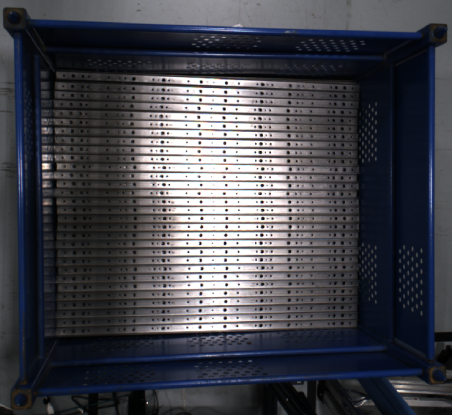
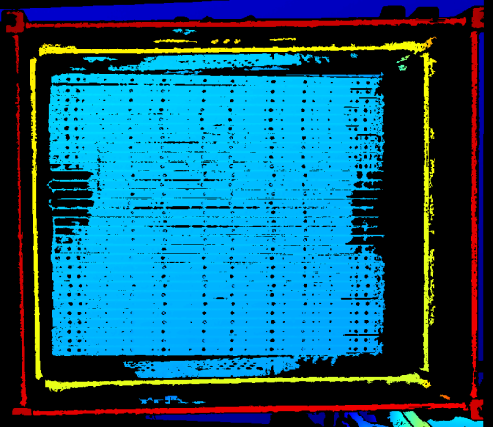
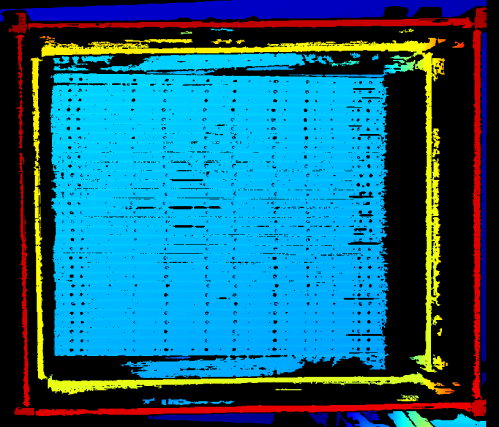
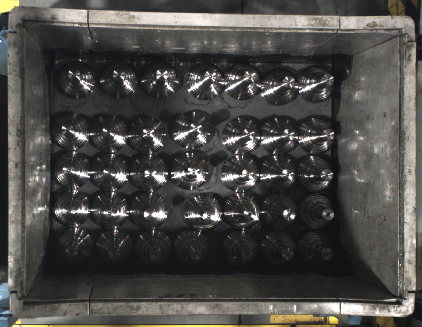
DEEP と LSR S、LSR L のファームウェアを 2.3.4 バージョンにアップグレードすると、コーディングモードの反射を選択すると新しいパラメータ処理モードが使用できます。その中、より速いを選択すれば 2.3.3 バージョンの効果と速度とはほぼ同じです。より完全を選択するとより高品質な深度データ、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、より完全を使用することを推奨します。
| より完全を選択すると処理の速度は遅くなります。他のパラメータ設定が同じ場合、より完全を選択すればより速いより約 1 秒遅くなります。 |
| 対象物 | より速い | より完全 |
|---|---|---|
|
|
|
|
|
|

問題修復
Mech-Eye SDK 2.3.4 バージョンでは、以下の問題を修復しました。
-
カメラ温度が高くなった時に切断が切って再起動する問題を修復しました。この場合に、ログにエラーコード 0x0315 が表示されます。
-
NANO ULTRA:3D パラメータグループの露出時間の値が小さい時に深度画像と点群に縞や楕円形の深度変動が生じる問題を修復しました。
-
Deep、Laser L、Log S、Log M、Pro S Enhanced、Pro M Enhanced、Pro L Enhanced:カメラファームウェアを 2.3.2、2.3.3 バージョンにアップグレードした後カメラが検索できなくなる問題を修復しました。この場合に、ログにエラーコード 0x0107 が表示されます。
-
内部パラメータで内部パラメータを補正した後、結果を閉じないまま Mech-Eye Viewer を強制的に終了すると結果の表示ウィンドウは閉じない問題を修復しました。
Mech-Eye API
DEEP、LSR S、LSR L:Reflective のコーディングモードに値を追加し、より完全な深度データが取得可能
DEEPと LSR S、LSR L のファームウェアを 2.3.4 バージョンにアップグレードすると、LaserFringeCodingMode(コーディングモード)の Reflective を選択すると新しいパラメータ ProcessingMode(処理モード)が使用できます。その中、Faster を選択すれば 2.3.3 バージョンの効果と速度はほぼ同じです。MoreComplete を選択するとより高品質な深度データを取得でき、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、MoreComplete を使用することを推奨します。
| MoreComplete を選択すると処理の速度は遅くなります。他のパラメータ設定が同じ場合、MoreComplete を選択すれば Faster より約 1 秒遅くなります。 |
| 対象物 | Faster | MoreComplete |
|---|---|---|
|
|
|
|
|
|
IP 設定ツール:非対話型コマンドモードを追加
IP 設定ツールに非対話型コマンドモードを追加し、指示を実行することで対応する IP 設定変更操作を完了できます。これにより、IP 設定用のグラフィカルインターフェースを開発するなど、より多様なニーズに対応可能です。
点群の点の座標の単位が設定可能
以下のメソッドを呼び出して点群の点の座標の単位を取得、設定できます。
| ただ、データを収集する前にメソッドを呼び出してください。 |
-
C++
-
C#
-
Python
ErrorStatus getPointCloudUnit(CoordinateUnit& unit) const;
ErrorStatus setPointCloudUnit(CoordinateUnit unit);ErrorStatus GetPointCloudUnit(ref CoordinateUnit unit);
ErrorStatus SetPointCloudUnit(CoordinateUnit unit);err, unit = self.camera.get_point_cloud_unit()
self.camera.set_point_cloud_unit(Unit)問題修復
Mech-Eye SDK 2.3.4 バージョンでは、以下の問題を修復しました。
-
カメラ温度が高くなった時に切断が切って再起動する問題を修復しました。この場合に、ログにエラーコード 0x0315 が表示されます。
-
NANO ULTRA:3D パラメータグループの露出時間の値が小さい時に深度画像と点群に縞や楕円形の深度変動が生じる問題を修復しました。
-
Deep、Laser L、Log S、Log M、Pro S Enhanced、Pro M Enhanced、Pro L Enhanced:カメラファームウェアを 2.3.2、2.3.3 バージョンにアップグレードした後カメラが検索できなくなる問題を修復しました。この場合に、ログにエラーコード 0x0107 が表示されます。
-
Nano、NANO、PRO XS:
getUntexturedPointCloudWithNormals()とgetTexturedPointCloudWithNormals()メソッドを呼び出して取得した点群には (0,0,0) 座標の点がある問題を修復しました。 -
Python:
get_textured_point_cloud_with_normals()メソッドを呼び出すと法線ベクトルの X 成分データが取得できない問題を修復しました。
GenICam インターフェース
DEEP、LSR S、LSR L:Reflective のコーディングモードに値を追加し、より完全な深度データが取得可能
DEEPと LSR S、LSR L のファームウェアを 2.3.4 バージョンにアップグレードすると、LaserFringeCodingMode(コーディングモード)の Reflective を選択すると新しいパラメータ ProcessingMode(処理モード)が使用できます。その中、Faster を選択すれば 2.3.3 バージョンの効果と速度はほぼ同じです。MoreComplete を選択するとより高品質な深度データを取得でき、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、MoreComplete を使用することを推奨します。
| MoreComplete を選択すると処理の速度は遅くなります。他のパラメータ設定が同じ場合、MoreComplete を選択すれば Faster より約 1 秒遅くなります。 |
| 対象物 | Faster | MoreComplete |
|---|---|---|
|
|
|
|
|
|
IP 設定ツール:非対話型コマンドモードを追加
IP 設定ツールに非対話型コマンドモードを追加し、指示を実行することで対応する IP 設定変更操作を完了できます。これにより、IP 設定用のグラフィカルインターフェースを開発するなど、より多様なニーズに対応可能です。
問題修復
Mech-Eye SDK 2.3.4 バージョンでは、以下の問題を修復しました。
-
カメラ温度が高くなった時に切断が切って再起動する問題を修復しました。この場合に、ログにエラーコード 0x0315 が表示されます。
-
NANO ULTRA:3D パラメータグループの露出時間の値が小さい時に深度画像と点群に縞や楕円形の深度変動が生じる問題を修復しました。
-
Deep、Laser L、Log S、Log M、Pro S Enhanced、Pro M Enhanced、Pro L Enhanced:カメラファームウェアを 2.3.2、2.3.3 バージョンにアップグレードした後カメラが検索できなくなる問題を修復しました。この場合に、ログにエラーコード 0x0107 が表示されます。