基本的な概念¶
ロボット
特別な説明がない限り、本節でいう「ロボット」とは、下図のような関節によって繋がれた鋼体で構成されるシステムのことです。

TCP[Tool Center Point](ツールセンターポイント)
エンドツールがロボットに取り付けられ、対象物に作用を及ぼす工具として機能します。TCPはエンドツールの尖端です。対象物の把持などを実行する場合、ロボットを指定した点に移動させることは、本質的にTCPをこの点に移動させることです。
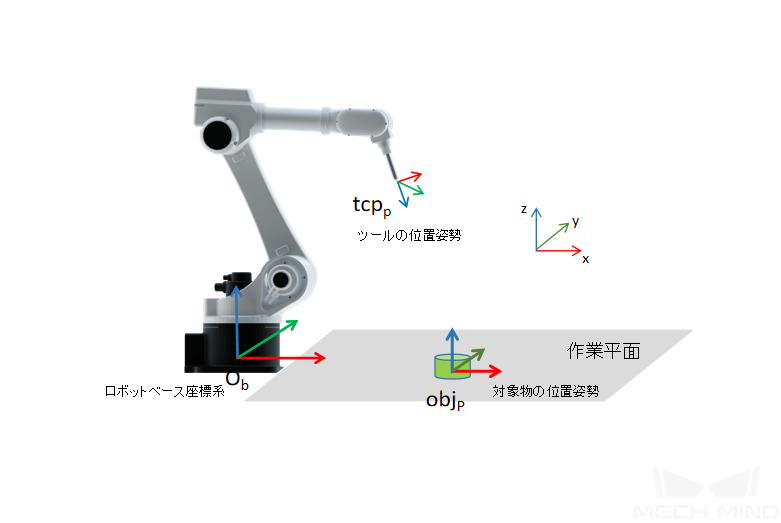
位置姿勢
物体が空間にある位置と姿勢を位置姿勢と呼びます。並進+回転(四元数またはオイラー角)で位置姿勢を表示します。Mech-Vizでは、位置姿勢はツール位置姿勢と物体位置姿勢に分けられます。ツール位置姿勢
TCPがロボットベースに対する位置姿勢です。
物体位置姿勢
物体の中心がロボットベースに対する位置姿勢です。物体がロボットエンドにあるとき、その初期位置姿勢がツール位置姿勢と同じ座標にありますが、Z方向が互いに逆となっています。
注釈
デフォルトでは、ツール位置姿勢のZ軸は、世界座標系のZ軸とは鈍角となります。物体を把持する際、物体の位置姿勢のZ軸はツール位置姿勢のZ軸は方向が逆です。
ロボット運動学は、順運動学と逆運動学に分けられます。
順運動学
ロボットの各関節の変数を指定し、ロボットエンドの位置姿勢を計算します。ロボットの関節位置を指定したら、TCP位置姿勢は一つしかありません。逆運動学
ロボットエンドの位置姿勢を指定し、ロボットの対応する位置のすべての関節変数を計算します。指定したツール位置姿勢が対応する関節位置は解が複数あり、または解がないことがあります。
自由度
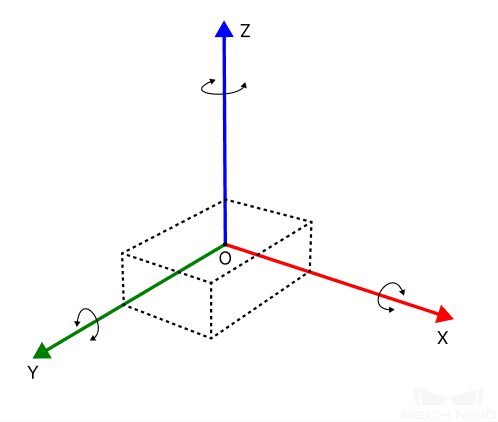
大雑把に言えば、自由度とは物体の運動の柔軟性を表すものです。制限を受けていない物体は、6の運動自由度があります。
断線の直方体を例に挙げます。直交座標系OXYZでは、3つの並進運動(X、Y、Z軸に沿う)と3つの回転運動(X、Y、Zを中心に)があります。
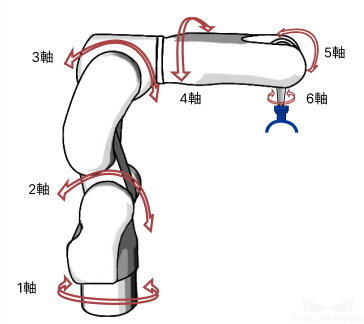
下図に示すように、一般的な6軸ロボットは、6の自由度があります。
把持-配置
把持-配置とは、ロボットが対象物に作用を及ぼす方式です。
把持
ロボットが把持位置姿勢に到達し、外部インターフェイスを介してエンドツールに送信する信号を変えてツールを駆動し対象物を把持します。「把持」が実行されたら、対象物とロボットTCPの相対位置はバインドされます。
保持
対象物の把持と放置の間の状態が「保持」と呼ばれます。この状態で、対象物がロボットとの固定関係が依然として存在します。この状態は、対象物が把持された後に自動的に有効になり、Mech-Vizで選択できなくなります。
配置
ロボットが配置位置姿勢に到達し、外部インターフェイスを介してエンドツールに送信する信号を変えてツールを駆動し対象物を配置します。「配置」が実行されたら、対象物とロボットTCPの相対位置はアンバインドされます。
対称性
対象物は位置姿勢があります。現場では、よく対称性のあるものを扱います。それに対して、ロボットが物体の 対称角度 によって把持・配置すれば、複数の方式があります。
対称角度
物体または把持位置姿勢がX/Y/Z軸を中心にα°回転すれば回転前と一致します。例えば、下図に示すように、長方形は180°回転対称、正方形は90°回転対称、正六角形は60°回転対称です。円またはリングは0°回転対称で、対称性のないものは360°回転対称です。 Z軸に関する対称性を強軸対称性と、X/Y軸に関する対称性を 弱軸対称性 といいます。
Z軸に関する対称性を強軸対称性と、X/Y軸に関する対称性を 弱軸対称性 といいます。弱軸対称性
対称性がより強い軸に関する対称性を弱軸対称性計算のために使用します。もう一つの軸に関する対称性を無視します。例えば、X軸に関して90°回転対称で、Y軸に関して0°回転対称であれば、弱軸はY軸で、対称角度は0°となります。ユーザーは物体対称性を設定してから、Mech-Vizによって最適な把持・配置経路が決定されます。到達率を向上させてロボットエンドの回転を減少することが可能です。物体対称性
下図に示すように、物体対称性は物体位置姿勢に使用されます。180°回転対称の物体に対して、ロボットが把持/配置する際に、「正方向」も、「負方向」も選択できます。これによってロボットエンドの回転を減少します。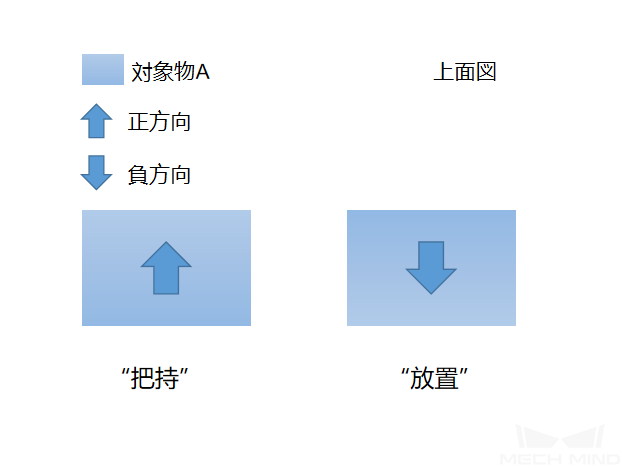 物体を正方向に処理しても負方向に処理しても結果は同じなので、ロボットはそれを正方向に把持して負方向に配置することができます。
物体を正方向に処理しても負方向に処理しても結果は同じなので、ロボットはそれを正方向に把持して負方向に配置することができます。把持位置姿勢対称性
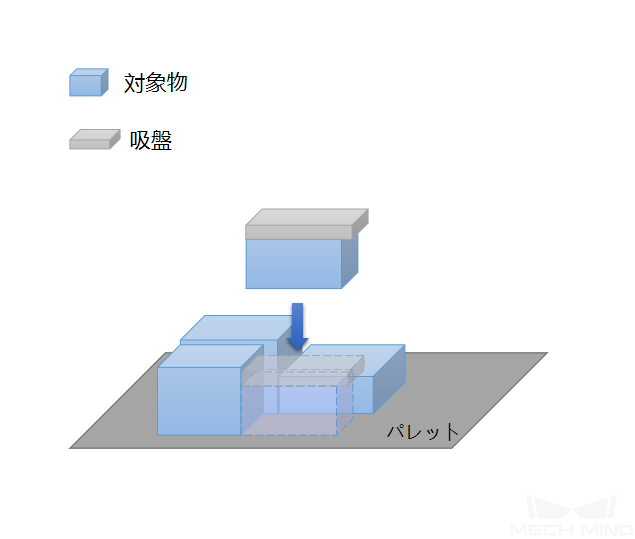
把持位置姿勢対称性はツールによる物体を把持する方式にかかわっており、最適な把持位置姿勢を選択することに使用されます。例えば、物体の寸法が吸盤より小さいとき、周りの物体と衝突しないように、オフセットを使用して把持を実行します。この場合、物体の対称性を使用しません。代わりに、把持位置姿勢は180°回転対称なので最初の把持位置姿勢でツールを回転します。下図に示すように「正方向」も「負方向」も把持できます。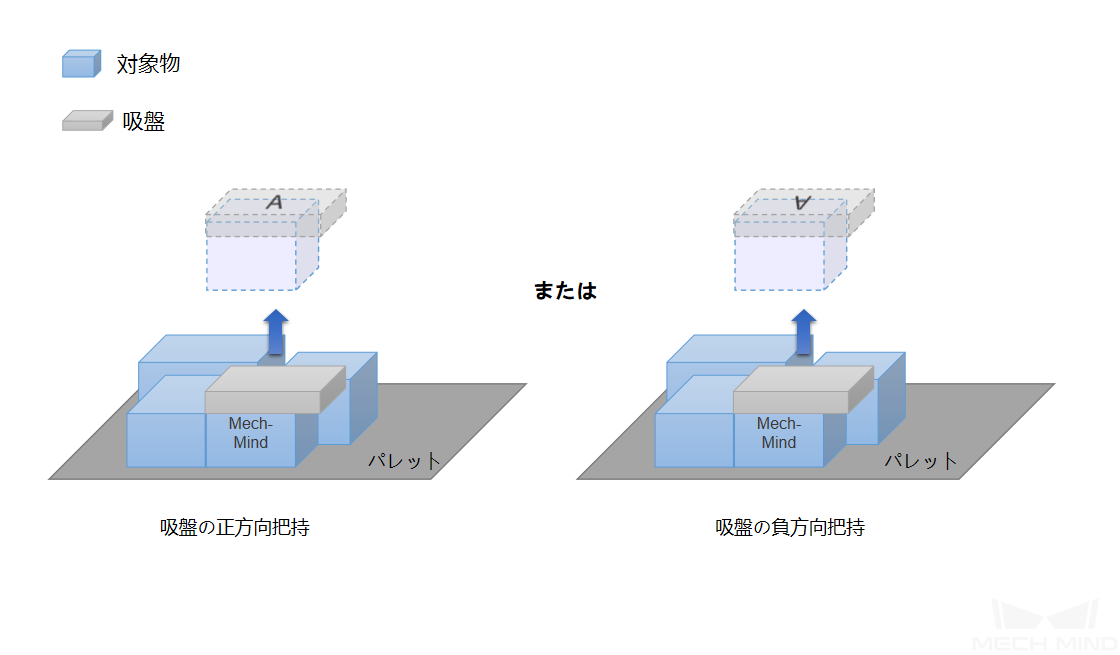 最適な経路を計画するために、把持する過程に、Mech-Vizでは把持位置姿勢と物体の位置姿勢を両方考慮し、「保持」と「配置」の時に物体対称性によって位置姿勢を選択します。例えば、コネクティングロッドを扱うプロジェクトでは、下図に示すようにグリッパーで内部把持します。
最適な経路を計画するために、把持する過程に、Mech-Vizでは把持位置姿勢と物体の位置姿勢を両方考慮し、「保持」と「配置」の時に物体対称性によって位置姿勢を選択します。例えば、コネクティングロッドを扱うプロジェクトでは、下図に示すようにグリッパーで内部把持します。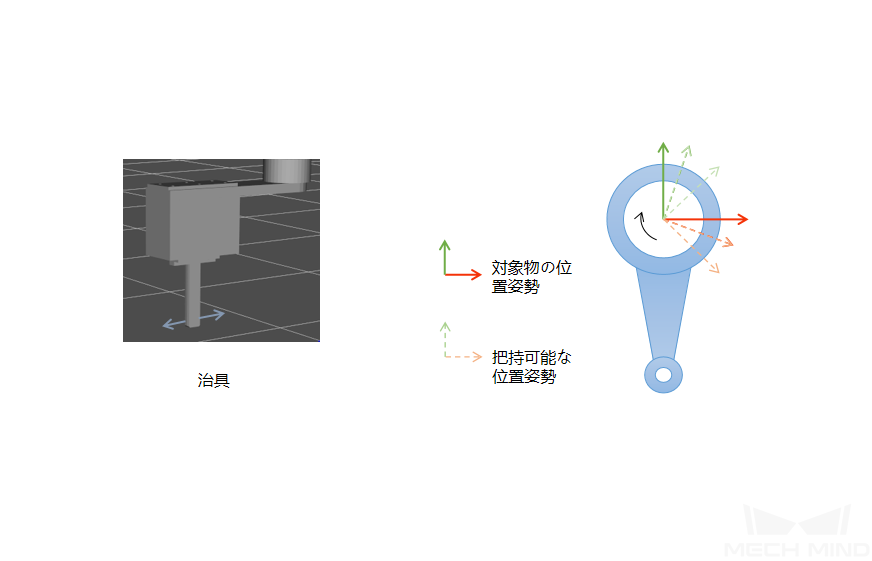 この場合、把持位置姿勢は0°回転対称でいかなる角度でも把持できます。ステップサイズ(例えば1°、10°など)を適切に設定してください。
この場合、把持位置姿勢は0°回転対称でいかなる角度でも把持できます。ステップサイズ(例えば1°、10°など)を適切に設定してください。
ツールのオフセット
下図に示すように、寸法が小さい、または形状が複雑な物体に対して、周りの物体と衝突が発生しないようにツールの中心を物体のある点にオフセットしてから把持を実行します。ツールのタイプとオフセット戦略を確認したら、Mech-Vizでオフセットの値を計算し、点群衝突検出と合わせて把持が実行できるかどうかを判断します。
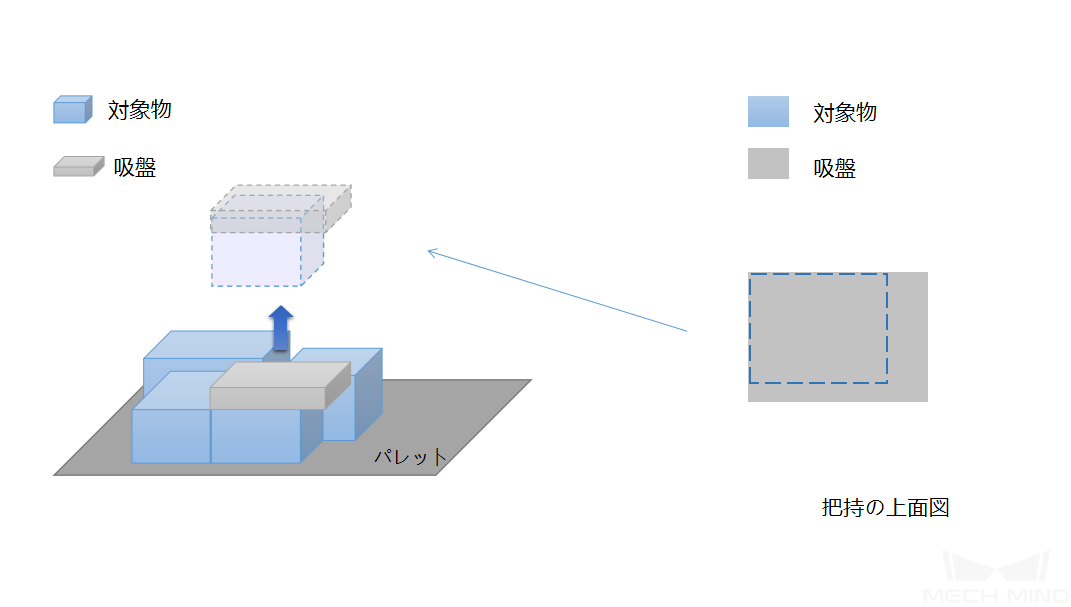
また、混載パレタイジングプロジェクトでも、ロボットが対象物を配置するとき、すでに配置されたものとの衝突を回避するために、ツールのオフセットを使用します。