特定场景下的工件识别
本文介绍在特定场景下如何进行工件识别。
工件上下料等场景下的工件识别
操作指南
-
使用工件库配置工件。
根据工件类型,在工件库首页选择除“无需点云模板”以外的其他工件配置流程,制作工件点云模板。
-
配置视觉工程。
-
运行工程,输出工件位姿。
工件上下料(带隔板或料筐)场景下的工件识别
适用场景
既需使用3D匹配方法识别工件,又需通过计算平面点云的位姿和尺寸方法识别隔板、料筐等。
操作指南
-
使用工件库配置工件。
-
配置视觉工程。
-
多工程
如果方案中包含工件识别、隔板识别两个工程,需对隔板识别工程进行如下配置。
步骤 参数 参数值 输出
选择场景
其他
无需制作点云模板的工件
隔板对应的工件名称
-
单工程
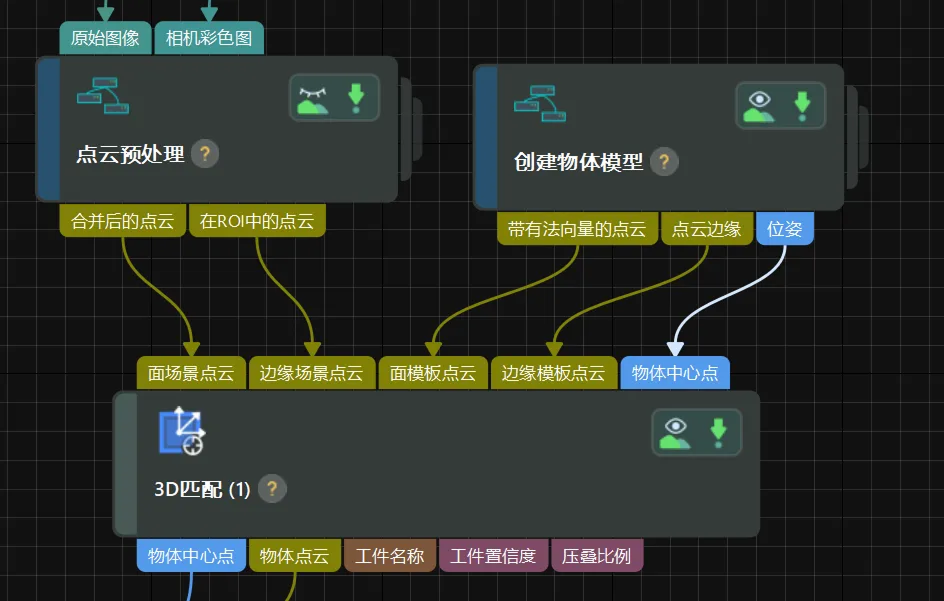
如果在一个工程中同时进行工件识别、隔板识别,需按如下图所示流程搭建工程。
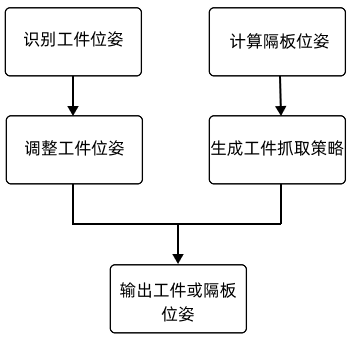
搭建完成的工程如下图所示。
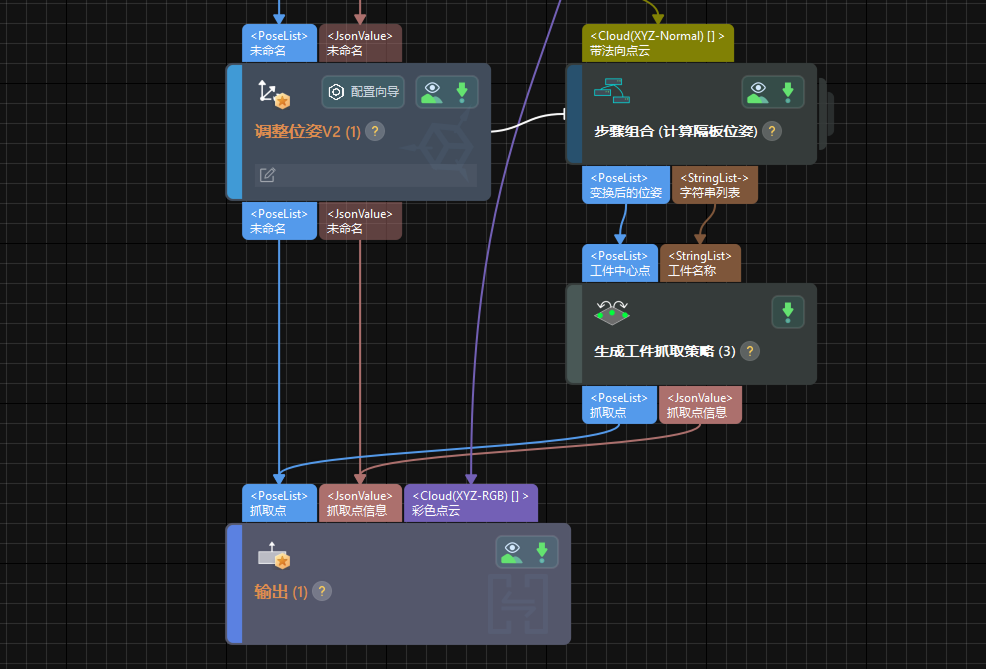
由于“生成工件抓取策略”步骤输入的是用工件库“无需点云模板”流程保存的工件的名称,所以应直接向该步骤输入抓取点,且步骤输出的抓取点与输入的抓取点一致。
工程搭建完成后,需对工程进行如下配置。
步骤 参数 调节说明 “3D匹配”步骤或3D工件识别工具
置信度阈值
为了避免误识别和漏识别,需设置合适的“置信度阈值”。
建议先将该参数设置为默认值并查看运行结果。若出现误识别的情况,建议适当调高该参数;若出现漏识别的情况,建议适当调低该参数。
调整位姿V2
无输出时触发控制流
勾选
无输出时继续执行
取消勾选
输出
端口类型
预定义(视觉结果)
选择场景
匹配
-
-
运行工程,输出工件位姿。
拆垛场景下的工件识别
适用场景
在拆垛场景下,使用计算平面点云的位姿和尺寸方法识别工件,未使用3D匹配方法。
使用外部点云模板识别工件
操作指南
在该场景下,需使用“3D匹配”步骤的“外部模板”功能读取“创建物体模型”步骤生成的点云模板,然后通过工件库生成除点云模板外的其他工件信息。具体操作步骤如下。
-
配置视觉工程。
-
使用工件库生成其他工件信息。
根据工件类型,在工件库首页选择“无需点云模板”工件配置流程,配置工件,获取除点云模板外的其他工件信息。
-
运行工程,输出工件位姿。