点检维护
现场设备需要参照点检标准,在规定的周期内使用正确方法对视觉系统的硬件和软件进行检查,以便早期发现设备故障隐患,及时加以维修调整。
| 类别 | 点检项 | 检查内容 | 点检周期 |
|---|---|---|---|
相机外壳 |
检查相机是否发生过碰撞 |
每天一次 |
|
相机线缆 |
检查相机线缆有无老化 |
每天一次 |
|
检查相机线缆两端连接是否稳固 |
每天一次 |
||
检查线缆是否存在弯折、扭转或磨损 |
每天一次 |
||
相机支架 |
观察相机支架是否存在形变或晃动,连接螺栓是否松动 |
两周一次 |
|
工控机 |
检查工控机是否放置在通风散热良好的环境 |
一周一次 |
|
重启工控机 |
一周一次 |
||
工控机周边设备 |
检查线缆接口处有无松动 |
一周一次 |
|
交换机 |
检查交换机是否正常工作 |
一周一次 |
|
机器人底座 |
检查机器人底座是否发生晃动 |
六个月一次 |
|
机器人零点 |
检查机器人零点是否偏移 |
两个月一次 |
|
相机内参 |
检查相机内参是否变差 |
两个月一次 |
|
相机外参 |
检查相机外参是否变差 |
两个月一次 |
相机及附件点检
相机外壳
相机外壳是保护相机内部精密元器件,同时保持相机的密封状态的重要结构,需要进行定期的日常维护保养,建议点检周期每天一次。
可以通过肉眼观察相机外观有无撞痕、形变和剐蹭来判定相机是否发生过碰撞。如果发生过碰撞,需要通过软件检查内外参精度是否变化。如变化,应停止使用以保证安全,并尽快更换相机或重新手眼标定。(内外参检查具体操作请参考“相机内外参点检”章节。)

相机线缆
相机线缆包括电源线和网线,电源线为3D相机提供所需的稳定电压,网线为3D相机和工控机通信提供稳定的数据传输环境,两者均需要进行定期的日常检查。 建议点检周期每天一次。
需要定期检查相机线缆有无老化,相机线缆两端连接是否稳固。如果通过机器人管线包走线的,除检查两端的连接情况外,还需根据管线包的磨损情况查看线缆是否存在弯折、扭转或磨损。如有问题需及时联系梅卡曼德更换线缆。

| 相机在长时间不使用时应断电处理。 |
相机支架
相机支架是3D相机安装的重要固定结构,相机支架的稳定性直接影响3D相机外参的准确性,因此需要进行定期的点检。建议点检周期两周一次。
可以肉眼观察相机支架是否存在形变或晃动,连接螺栓是否松动来判定相机安装是否稳固。如检查不合格,需要通过软件检查内外参精度是否变化。如变化,应停止使用以保证安全,并尽快重新手眼标定。(内外参检查具体操作请参考“相机内外参点检”章节。)

工控机及交换机点检
-
3D视觉软件均安装在工控机上,工控机的状态直接影响到视觉软件运行和计算时间。为保证工控机正常运行,需要进行定期的日常点检。建议点检周期为一周一次。
-
交换机和网线用于各硬件的网络连接,定期检查可减少网络通信故障。建议点检周期为一周一次。
-
工控机周边设备:关键部分包括工控机电源、网线及软件授权装置(加密狗);非关键部分包括键盘和鼠标连接线、HDMI视频线。为保证工控机运行稳定,需定期检查线缆接口处有无松动。建议点检周期为一周一次。

-
建议将工控机放置在通风散热良好的环境内,并定期重启工控机,使工控机运行更稳定。需注意不要将工控机放置在密闭狭小空间内,工控机表面不要放置无关物品;工控机冷却通风口不得有任何物体遮挡,工控机本体周围至少预留5厘米的间隙,以防止系统过热。建议点检周期一周一次。
机器人点检
机器人是工作流程的执行机构,机器人精度将直接影响到抓取准确性。
-
机器人底座:检查机器人底座是否发生晃动。如有晃动,需停止使用,重新固定机器人、标定外参。建议点检周期六个月1次。
-
机器人零点:机器人零点偏移会引起机器人精度变化。请参考当前机器人的操作手册进行零点检查。检查如果机器人零点偏移,需停止使用,重新标定零点、标定外参。建议点检周期两月一次。
相机内外参点检
针对相机软件,主要检查相机内外参。这两个参数会影响视觉识别准确性,建议点检周期两月一次。(检查相机内外参需要使用到视觉软件,请在技术人员指导下操作)。
|
在检查相机内外参前,请务必预热暖机。相机未达到热平衡前,无法有效保证点云重建的精度。请使用以下任一方法进行预热暖机:
|
内参检查方法
将标定板放到相机正下方,标定板与相机距离尽量等于相机焦距,标定板尽量平行于相机下表面,然后再进行软件操作。
-
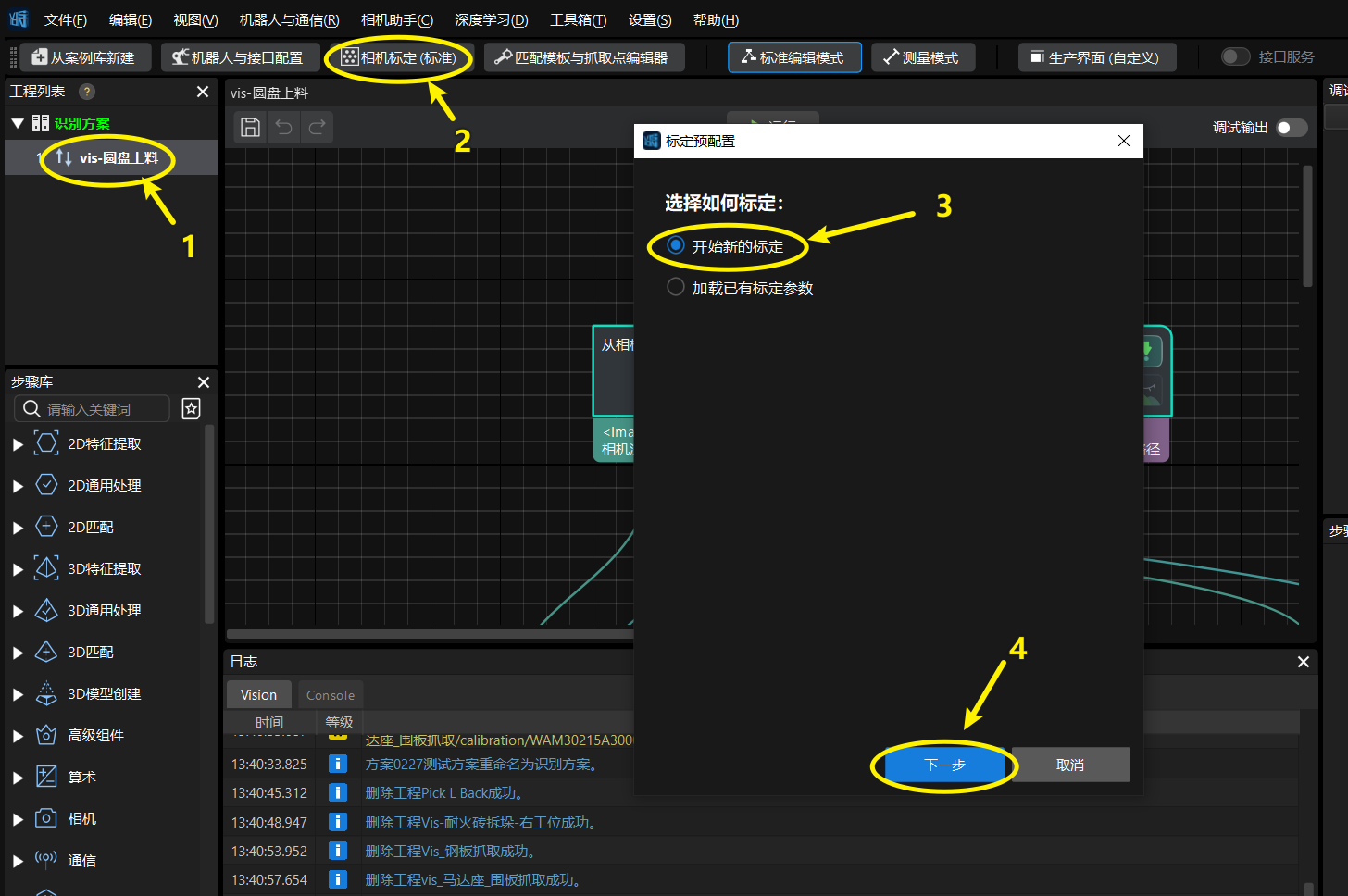
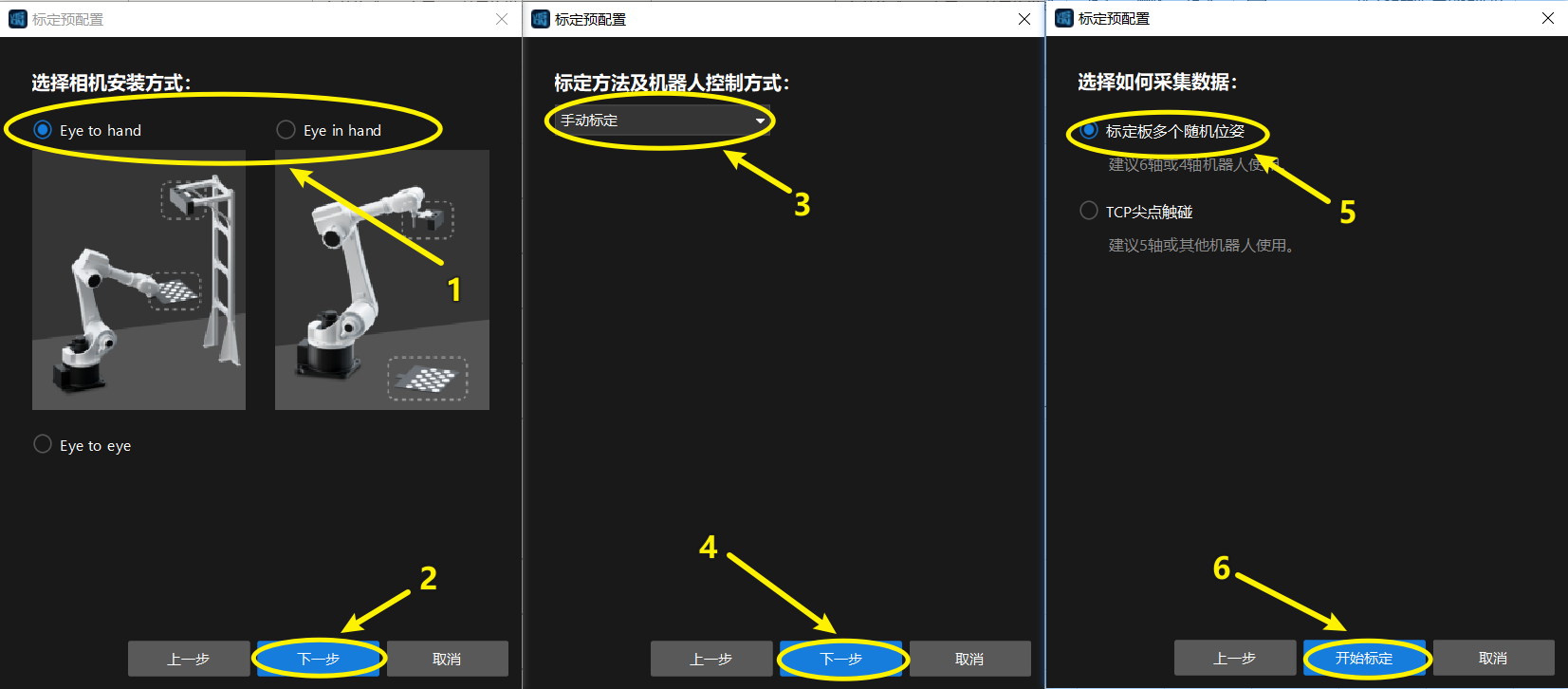
打开Mech-Vision软件,选中工程,单击相机标定按钮,选择开始新的标定,然后单击下一步按钮。
-
确定已完成标定前检查工作,单击确认检查按钮,然后单击下一步按钮。
-
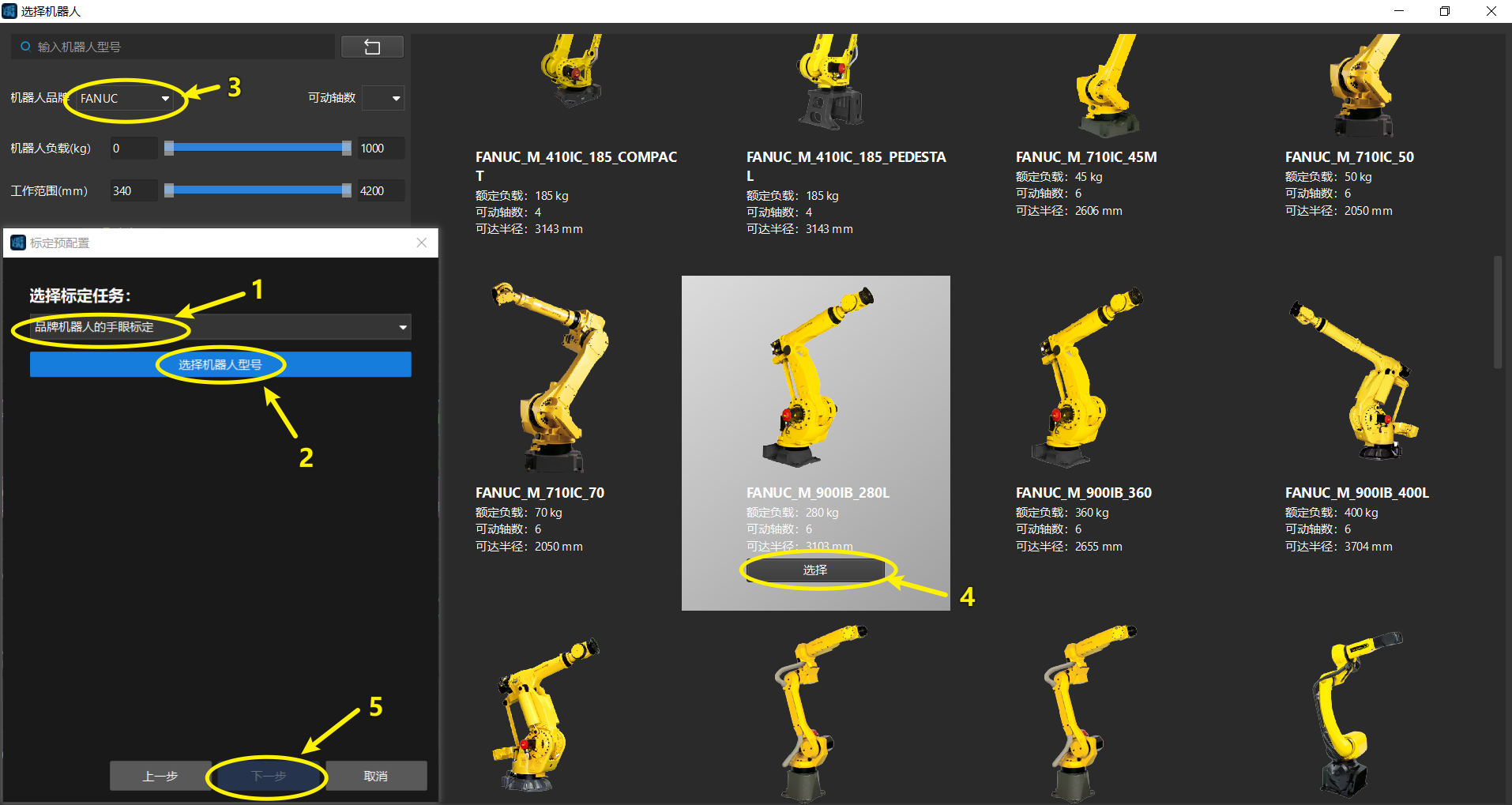
根据现场情况选择机器人型号,依次单击对应按钮。
-
根据相机的安装方式(安装在固定支架上选Eye to Hand,安装在机器人上选Eye in Hand),依次单击对应按钮。
-
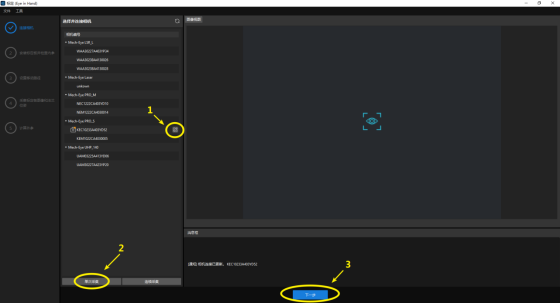
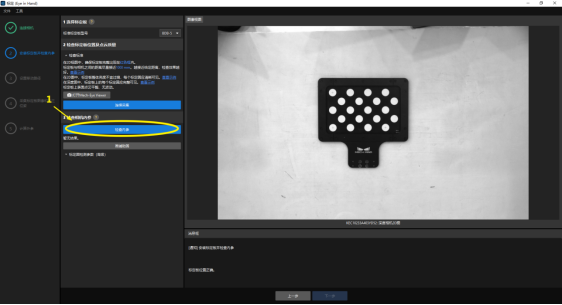
在连接相机步骤,连接相机,选择对应相机→单击连接按钮→单次采集,确认相机2D图与深度图正常后单击下一步按钮。
-
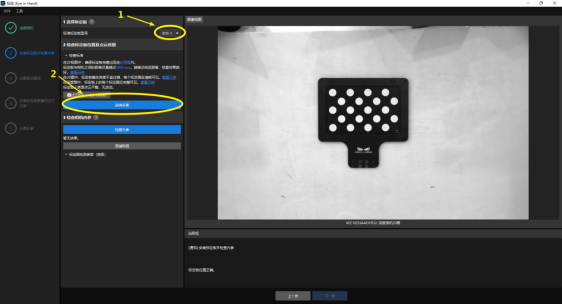
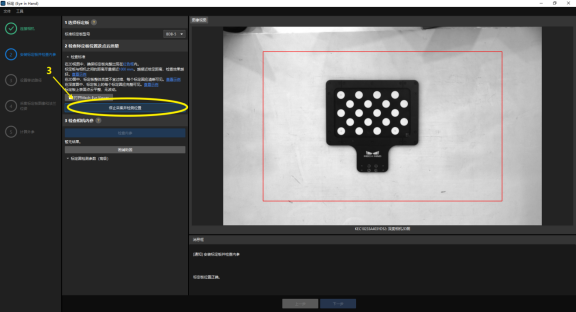
在安装标定板并检查内参步骤,选择对应的标定板型号(标定板上有标注),单击连续采集,保证标定板在右侧视图红框内部即可,然后单击停止采集并检测位置按钮。
-
单击检查内参。
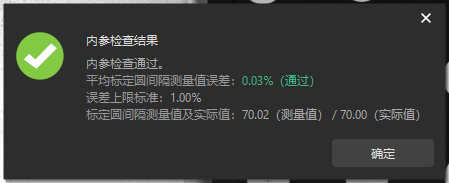
检测成功显示如下,如果内参误差超出正常范围,显示的信息会变为红色,此时需要检查问题所在,重新标定相机内参。
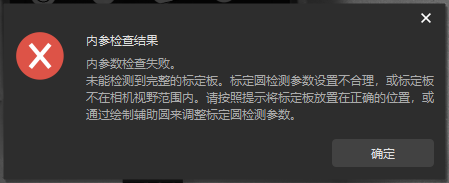
如出现如下检测失败情况,单击确定,然后进行画辅助圆操作。
-
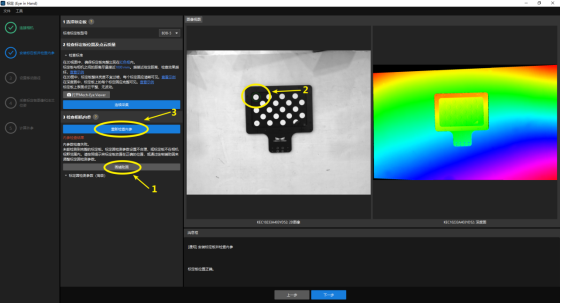
如果内参检查失败,画辅助圆:单击开始画辅助圆→用鼠标在右侧标定板上圈出一个白色圆点→单击重新检查。
外参检查方法(仅适用于机器人有模型的情况下)
可以通过查看机器人的点云与机器人模型的重合度,来检查外参。对于精度要求较高的场景(±2mm以内),需要使用外参精度验证工具验证外参。
查看机器人的点云与机器人模型的重合度(ETH)
-
将机器人本体(最好是五轴部分)移动到相机视野内。
-
打开Mech-Vision软件,单击工具栏上的相机标定按钮。
-
在标定预配置窗口,在选择如何标定步骤,选择加载已有标定参数,在选择参数用途步骤,选择标定当前加载的相机,在选择标定任务步骤,选择重新计算外参,然后单击开始标定按钮。
-
在标定窗口,在计算外参步骤中,单击2 辅助工具区域中的相机采集按钮。该操作将触发相机拍照。
-
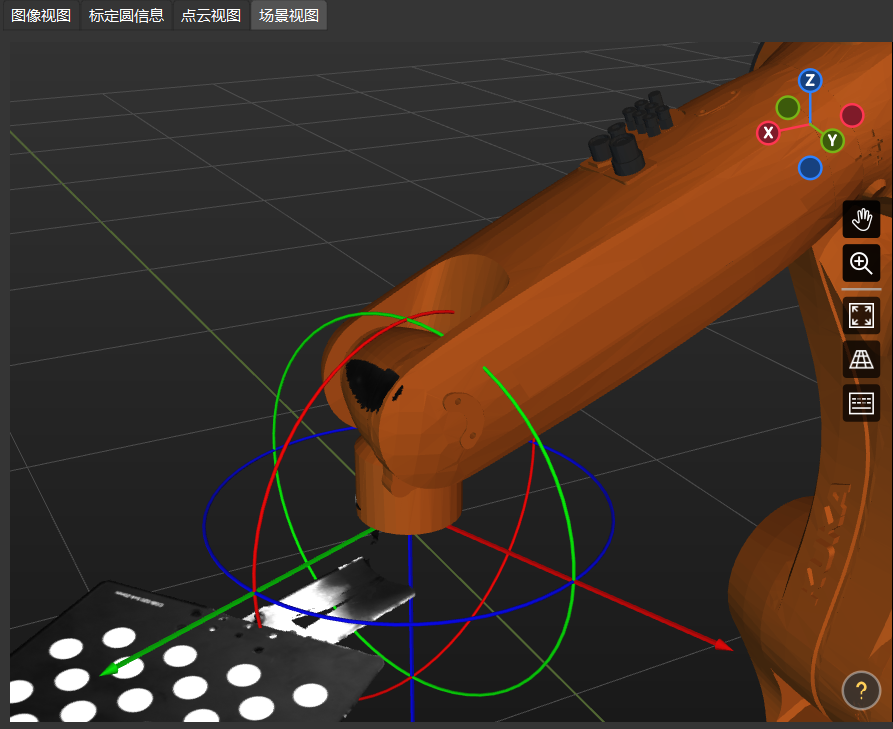
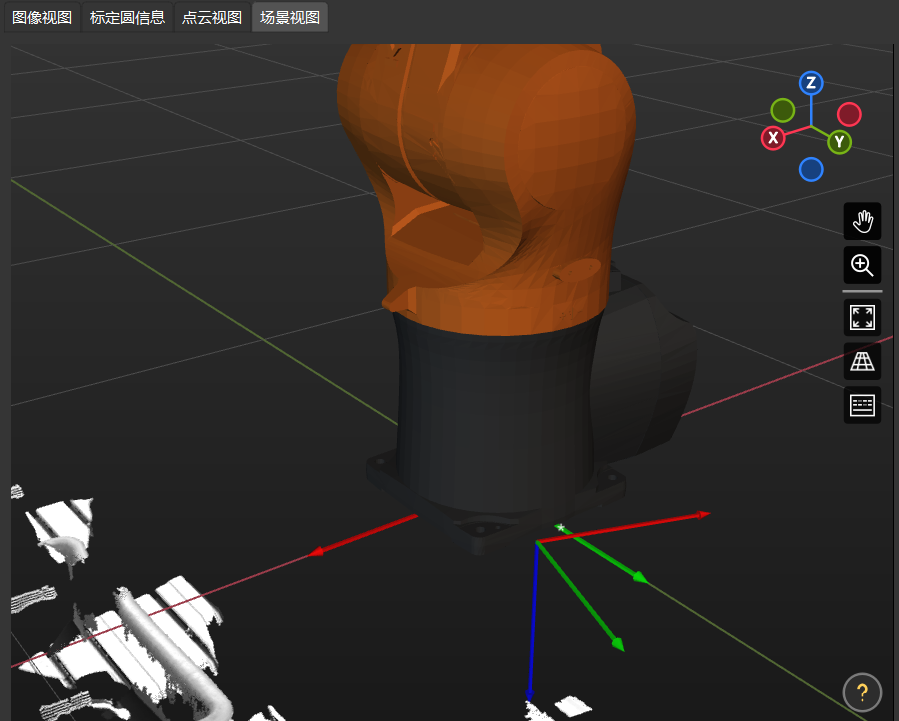
在右侧场景视图,通过目测检查真实机器人点云与机器人模型的重合程度。
如机器人的点云与机器人模型大致重合,则说明标定结果可用。