Eye to Hand场景下的手动重新标定(四轴机器人-标定板多个随机位姿)
本操作指南介绍如何完成四轴机器人在Eye to hand(ETH)场景下的重新进行手动手眼标定(标定板多个随机位姿)。
标定前准备
在重新手眼标定前,你先需要完成如下准备工作:
-
找到项目提供的标定板。请确保标定板上圆清晰,没有明显刮花痕迹,标定板没有明显弯曲变形。
请按照如下要求准备标定板:
-
请确保标定板上圆清晰,没有明显刮花痕迹,标定板没有明显弯曲变形。
-
将标定板连接件安装到机器人末端法兰上,再将标定板安装到连接件上。确保标定板安装稳固,标定板与机器人末端的XY平面平行。
当机器人法兰装载不可拆卸夹具时,可将标定板直接固接在夹具上。
-
清理工位物料,保证标定区域无障碍物。
-
手动控制机器人,将标定板移动到标定起始位置。对于ETH场景下的自动标定,机器人的标定起始位置为视野最下方中间位置(机器人带动标定板由下往上层层标定)。






标定预配置
-
打开Mech-Vision软件,在工程列表中选择工程,然后在工具栏上单击相机标定(标准)按钮。标定预配置窗口将弹出。
-
在选择如何标定界面,选择加载已有标定参数单选按钮,并选择该工程之前标定的参数,然后点击下一步按钮。
-
在选择参数用途界面,选择标定当前加载的相机单选按钮,然后点击下一步按钮。
相机状态应显示为已连接。 -
在选择标定任务界面,选择从开始步骤重新标定单选按钮,然后点击开始标定按钮。标定(Eye to Hand)窗口将弹出。
至此,标定预配置已完成,将进入正式标定流程。
标定流程
连接相机
默认情况下,项目使用的相机为已连接状态。请点击下一步按钮继续标定流程。
如果相机未连接,参照如下操作指导完成相机连接:
-
在连接相机步骤,在相机列表中选中需要连接的相机,然后单击
 即可连接相机,或者直接双击需要连接的相机。
即可连接相机,或者直接双击需要连接的相机。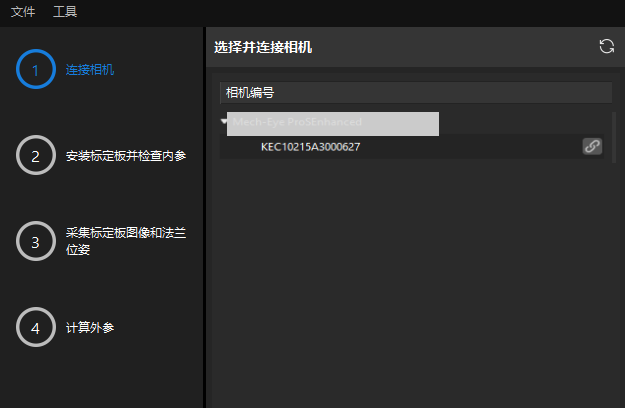
-
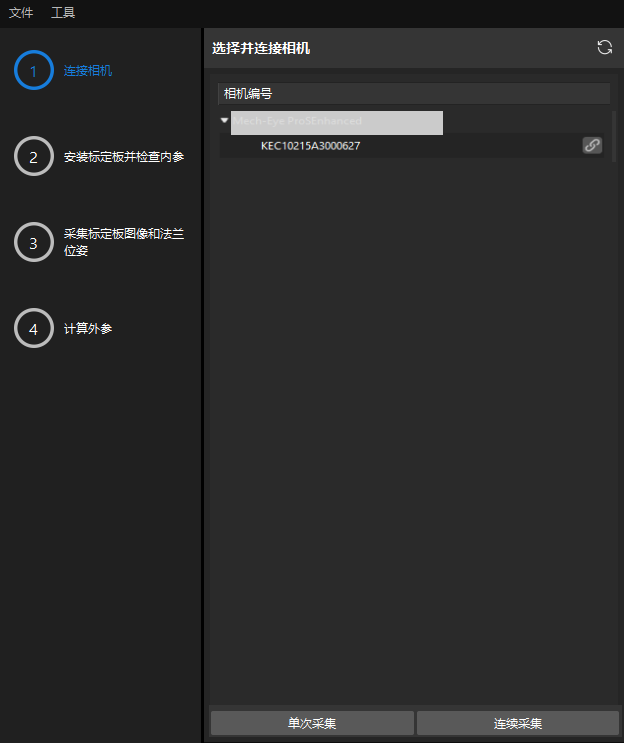
连接相机后,可以选择连续采集或者单次采集按钮。
-
在图像视图中,确定相机能够正常采集图像,然后在底部栏单击下一步按钮。
安装标定板并检查内参
-
在安装标定板并检查内参步骤,在1 选择标定板区域,根据标定板的型号标签设置标准标定板型号参数。

-
在2 检查标定板位置和点云质量区域,请仔细了解标定板位置和点云质量检查标准,然后单击连续采集按钮。连续采集按钮将会变为停止采集并检测位置按钮。
-
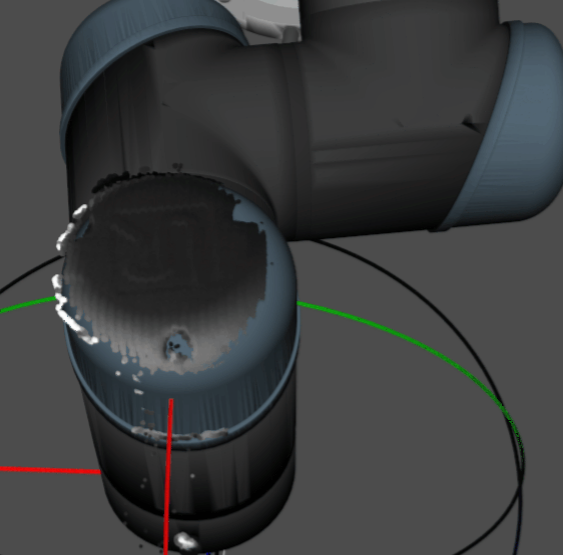
控制机器人携带标定板移动到合适的位置(标定板位于红色框内),并且确保标定板的2D图和深度图满足检查标准,然后单击停止采集并检测位置按钮。
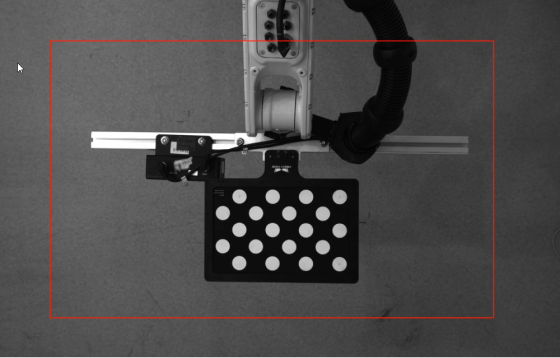
如果采集的图像不符合标准,单击打开Mech-Eye Viewer按钮打开Mech-Eye Viewer软件,调整相机的2D和3D曝光参数,并重新进行采集。注意先将参数组切换为“calib”后再调节参数。
-
在3 检查相机内参区域单击检查内参按钮。
-
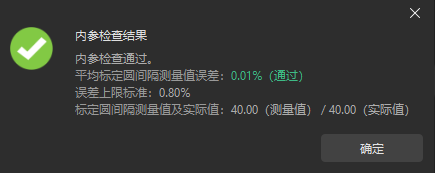
确认相机内参检查结果。
-
如果相机内参检查成功,在弹出的窗口单击确定按钮,然后在底部栏单击下一步按钮。
-
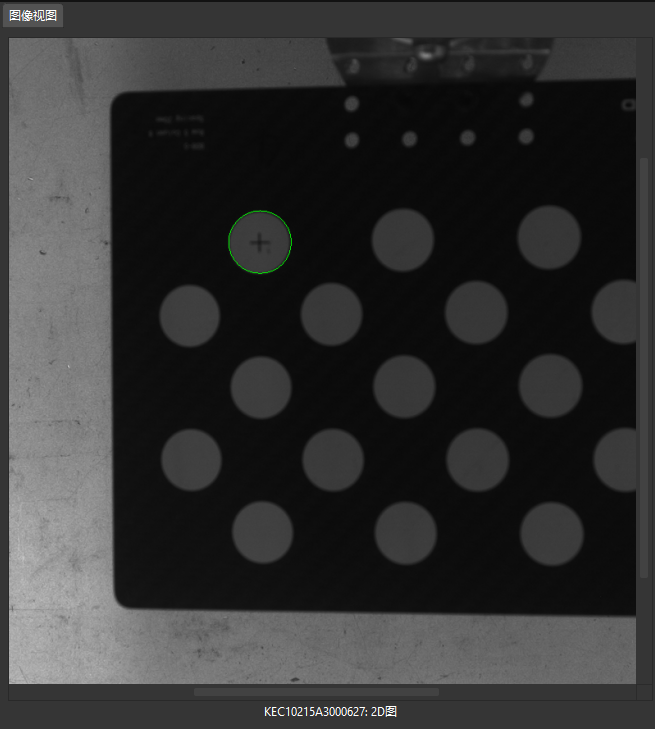
如果相机内参检查失败,通过画辅助圆或者手动编辑标定圆检测参数,然后单击重新检查内参按钮。如果内参检查仍然失败,请联系技术支持。
-
采集标定板图像和法兰位姿
-
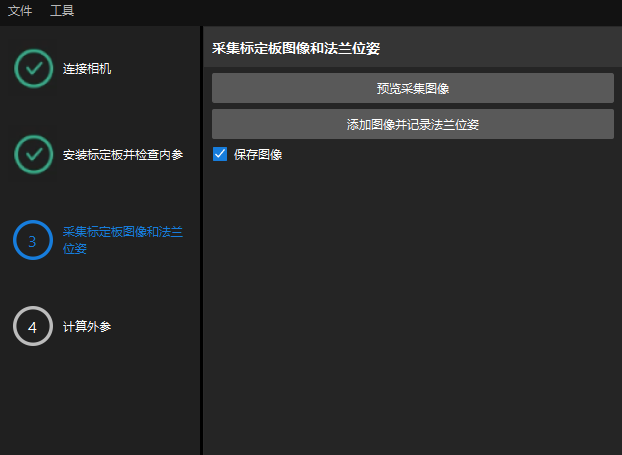
在采集标定板图像和法兰位姿步骤,保存图像复选框默认勾选(推荐勾选),如不需要保存图像可取消勾选。
-
控制机器人移动到不同的标定点,然后单击添加图像并记录法兰位姿按钮。
机器人移动的标定点位姿请参见请参考项目部署阶段留存的标定点位姿记录。 -
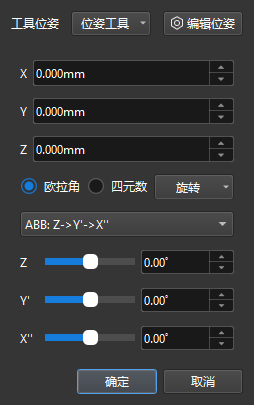
在弹出的窗口中输入机器人法兰位姿。
-
确认当前识别的标定点满足需求,然后在底部栏单击下一步按钮。
计算外参
-
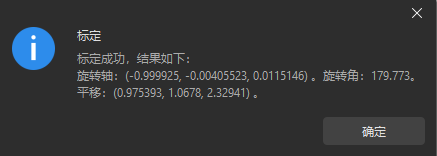
在计算外参步骤,单击计算外参按钮。

-
在弹出的标定成功对话框中单击确定按钮。
-
计算外参Z轴平移量。
因四轴机器人缺少旋转自由度,标定过程中采集图像缺少旋转量。在标定完成后,需要手动调整外参的Z轴值。 -
控制机器人移动到相机的视野下,然后在调整参数区域点击应用参数并预览点云按钮。
-
在Mech-Viz软件中,确认机器人实际点云与机器人模型是否重合。
-
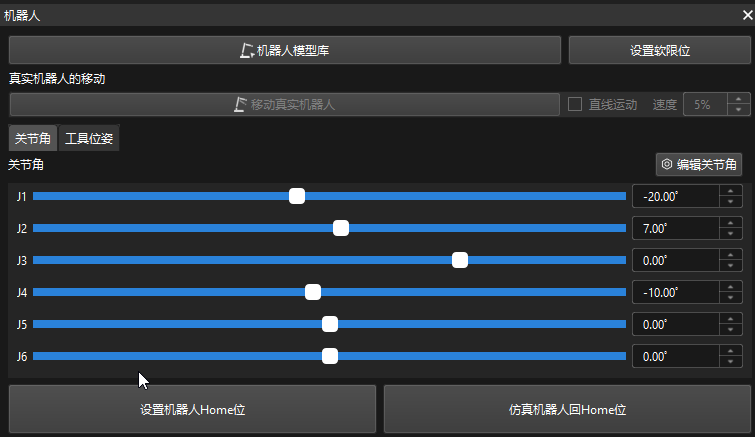
查看机器人示教器中机器人实时位姿,然后在Mech-Viz软件的机器人功能面板中输入当前机器人关节角。
-
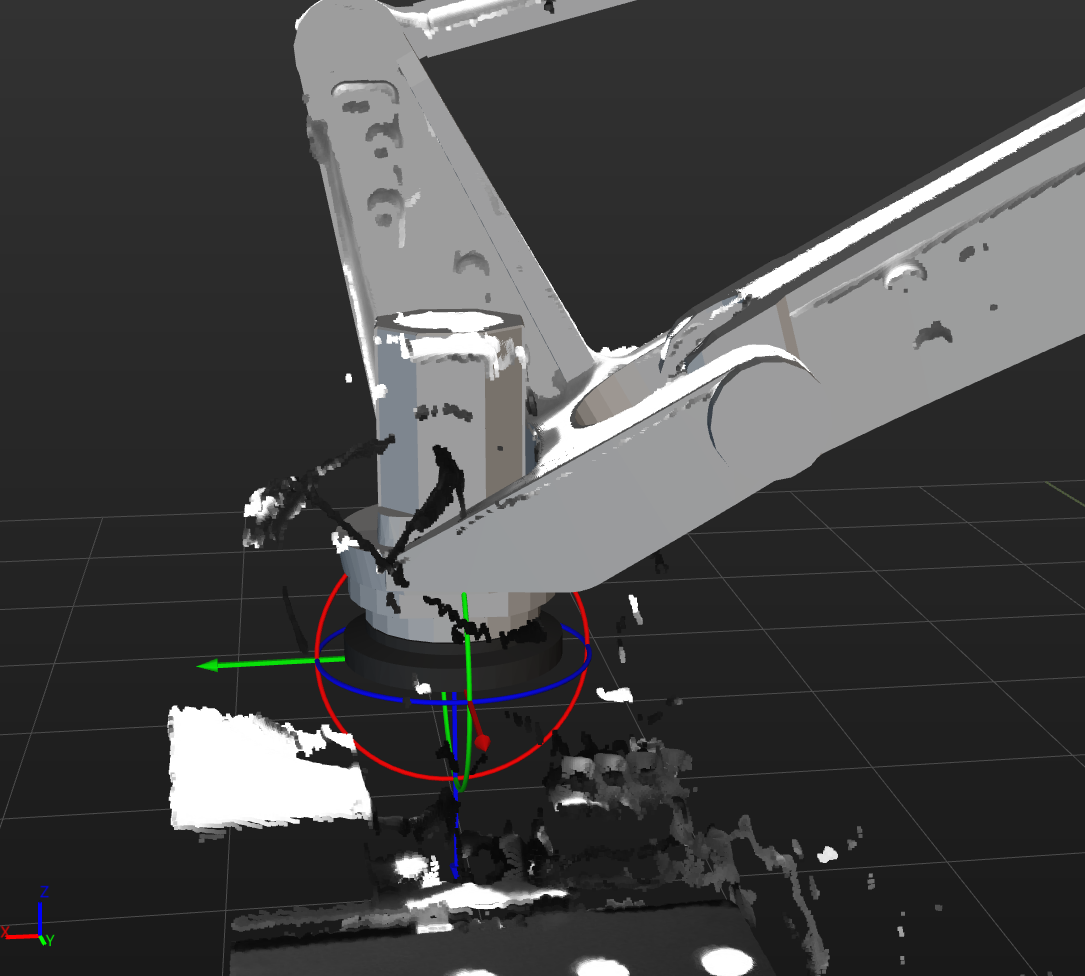
在Mech-Viz软件的三维仿真空间中确认机器人实际点云与机器人模型是否重合。如果重合,则执行下一步。否则在Mech-Vision软件重新修改Z轴平移参数值,并单击应用参数并预览点云按钮,直至确认机器人实际点云与机器人模型重合。
-
-
在底部栏单击保存按钮,在弹出的保存标定文件对话框,单击确定按钮。相机标定结果将自动保存到工程的“calibration”目录下。
至此,标定流程完成。