视觉系统未输出结果
本节介绍视觉系统未输出结果问题及解决方案。
视觉系统未输出结果问题通常会伴随其他问题出现,请根据相应的问题现象进行处理。
采图异常
| 问题现象 | 解决方案 |
|---|---|
Mech-Eye Viewer搜索不到相机。 |
请参考搜索不到相机进行故障排查。 |
Mech-Eye Viewer搜索到相机,但Mech-Vision无法获取图像。 |
请参考Mech-Eye Viewer搜索到相机,但Mech-Vision无法获取图像进行故障排查。 |
稳定生产中偶发相机连接断开。 |
请参考相机偶发连接断开进行故障排查。 |
采集的点云中有时会出现缺失。 |
请参考点云缺失进行故障排查。 |
图像采集时间过长。 |
请参考图像采集时间过长进行故障排查。 |
3D ROI中无点云
问题现象:
视觉系统未输出结果给机器人或PLC,且3D感兴趣区域(ROI)中无点云。
常见可以设置3D ROI的步骤有:“3D工件识别”、“提取3D ROI内点云”
可能原因:
3D ROI设置不合理。
解决方案:
深度学习推理无结果
问题现象:
Mech-Vision工程使用“深度学习模型包推理”步骤进行深度学习推理时,推理结果为空。
可能原因:
置信度阈值设置过高。
解决方案:
在“深度学习模型包推理”步骤的步骤参数选项卡,将实例分割置信度阈值参数值调低。
如果问题仍未解决,请联系技术支持。
3D匹配无结果
问题现象:
3D匹配类步骤或“3D工件识别”步骤无匹配结果输出。
可能原因:
-
步骤无点云输入。
-
“3D精匹配”或“3D工件识别”步骤的置信阈值设置过高导致所有匹配结果被过滤。
-
来料发生变化,工件点云模板与实际待匹配工件不一致。
解决方案:
请按照如下步骤处理:
-
在Mech-Vision软件中,双击3D匹配类步骤或“3D工件识别”步骤上方的数据流线,在调试输出窗口查看是否有点云。
-
如果有点云输入,执行下一步。
-
如果无点云输入,请排查3D ROI设置不合理、或者聚类和过滤参数设置不合理导致工件点云被过滤。
-
-
选中“3D精匹配”或“3D工件识别”步骤,调低置信度阈值并单步执行该步骤,然后在调试输出窗口确认是否有匹配结果。
-
如果有匹配结果,执行下一步。
-
如果无匹配结果,联系技术支持。
-
-
在调试输出窗口,查看待匹配物的点云与模版点云是否一致。
-
如果一致,故障处理结束。
-
如果不一致,请重新创建工件的点云模板,并修改步骤调用的点云模板。
-
Mech-Vision工程运行超时
问题现象:
视觉系统未输出结果给机器人或PLC,且Mech-Vision日志面板的控制台选项卡中打印日志“[1019]:Mech-Vision运行超时”。
解决方案:
请按照如下步骤处理:
-
请确认工控机磁盘是否爆满。
-
如果磁盘爆满,请及时清理磁盘,然后执行下一步。
-
如果磁盘未爆满,执行下一步。
-
-
参考1019错误码进行故障排查。
-
如果故障不能排查,请联系技术支持。
外参文件丢失或损坏
问题现象:
相机外参文件(Mech-Vision工程目录下的calibration/相机编号/extri_param.json文件)内容丢失。
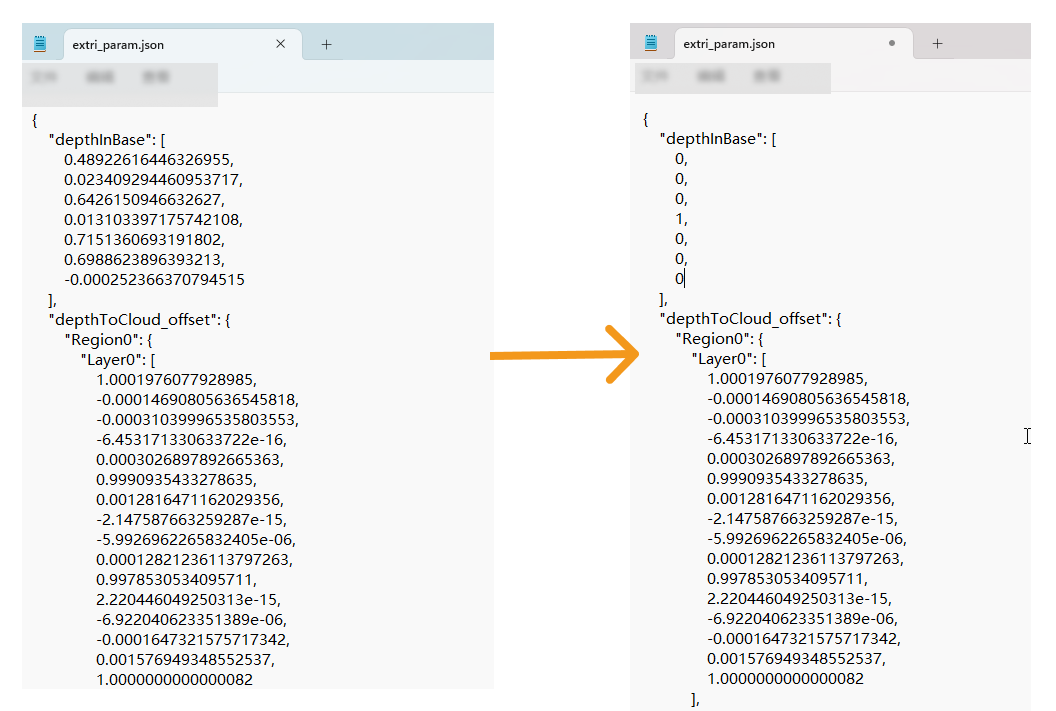
可能原因:
工控机异常断电导致外参文件内容丢失。
解决方案:
请使用备份的外参文件恢复,或者重新进行手眼标定。

Mech-Vision软件闪退或内存不足
问题现象:
由于工控机内存用尽,可能会出现如下问题:
-
Mech-Vision日志中打印错误提示:bad allocation。
-
Mech-Vision长时间未响应。
-
Mech-Vision软件闪退。
解决方案:
-
如果日志中有“bad allocation”报错,参考内存不足进行故障排查。
-
确认工件模型是否过大且未降采样。如果是,尝试重新制作点云模板并适当降采样,以减少计算量。
-
定期重启工控机。推荐一周一次。
机器人无法到达路径点
问题现象:
机器人无法到达路径点,且有错误日志。
-
如果项目使用Mech-Vision进行路径规划,则Mech-Vision日志面板的控制台选项卡中打印日志“[1030] Mech-Vision:机器人无法到达路径点”。
-
如果项目使用Mech-Viz进行路径规划,则Mech-Vision日志面板的控制台选项卡中打印日志“[2004] Mech-Vision:机器人无法到达路径点”。
解决方案:
请参考2004错误码进行故障排查。如果故障不能排查,请联系技术支持。
Mech-Viz工程运行超时
问题现象:
视觉系统未输出结果给机器人或PLC,且Mech-Vision日志面板的控制台选项卡中打印日志“[2025] Mech-Viz:运行超时”。
解决方案:
请按照如下步骤处理:
-
请确认工控机磁盘是否爆满。
-
如果磁盘爆满,请及时清理磁盘,然后执行下一步。
-
如果磁盘未爆满,执行下一步。
-
-
参考2025错误码进行故障排查。
-
如果故障不能排查,请联系技术支持。
Mech-Viz:视觉服务没有输出视觉结果
问题现象:
视觉系统未输出结果给机器人或PLC,且Mech-Vision日志面板的控制台选项卡中打印日志“[2037] Mech-Viz:视觉服务没有输出视觉结果”。
解决方案:
请参考2037错误码进行故障排查。如果故障不能排查,请联系技术支持。
Mech-Viz:检测到奇异点
问题现象:
视觉系统未输出结果给机器人或PLC,且Mech-Vision日志面板的控制台选项卡中打印日志“[2020] Mech-Viz:检测到奇异点”。
解决方案:
请参考2020错误码进行故障排查。如果故障不能排查,请联系技术支持。
Mech-Viz:检测到机器人碰撞
问题现象:
视觉系统未输出结果给机器人或PLC,且Mech-Vision日志面板的控制台选项卡中打印日志“[2031] Mech-Viz:检测到机器人碰撞”。
解决方案:
请参考2031错误码进行故障排查。如果故障不能排查,请联系技术支持。