특수 구성 목록
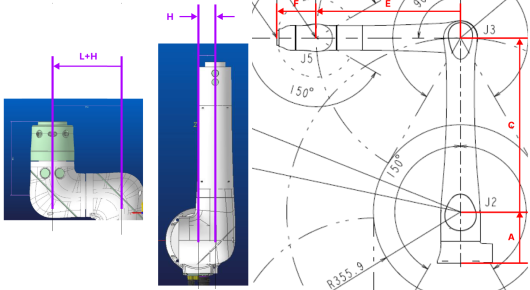
OffsetWrist_Y_SixAxis_FANUC_CRX_10IA_Like J5 -y 방향을 따라 옵셋(L)
축 수 |
6축 |
구성 명칭 |
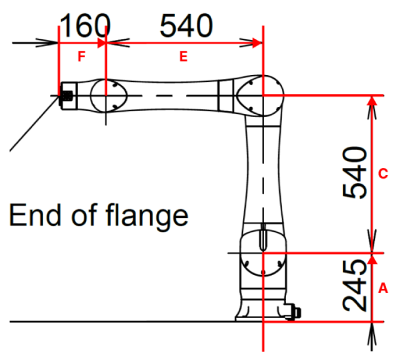
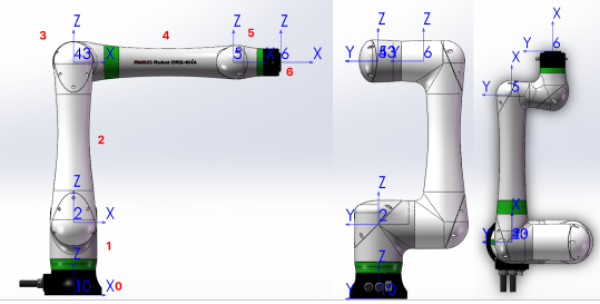
OffsetWrist_Y_SixAxis_FANUC_CRX_10IA_Like |
구성에 관한 설명 |
J5 -y 방향을 따라 옵셋(L) |
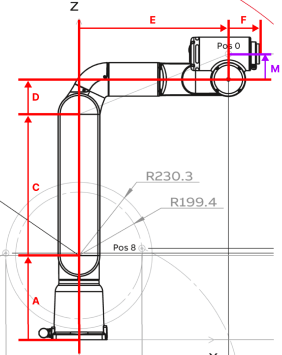
dh 파라미터 그림 |
|
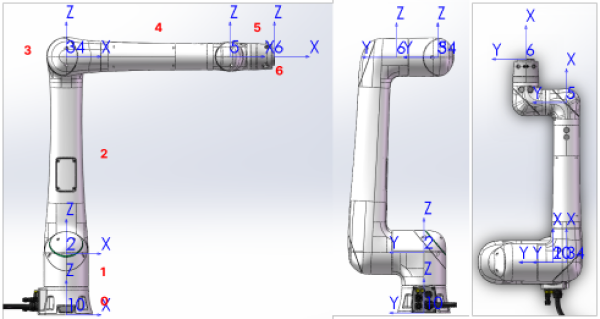
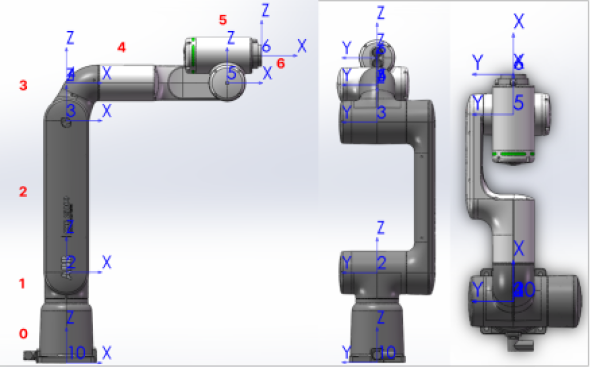
좌표계 각 축 이름 |
|
커넥팅 로드와 좌표계의 대응 관계 |
0: 좌표계 0, 1 |
1: 좌표계 0, 1 |
|
2: 좌표계 2 |
|
3: 좌표계 3, 4 |
|
4: 좌표계 3, 4 |
|
5: 좌표계 5 |
|
6: 좌표계 6 |
|
축 |
손목: 5, 6 |
아래팔: 3, 4 |
|
위팔: 2 |
|
베이스: 0, 1 |
|
모델 |
FANUC CRX-10iA, FANUC CRX-10iAL, YASKAWA HC10 |
[robot]_algo 예시
{
"algo_type": "OffsetWrist_Y_SixAxis_FANUC_CRX_10IA_Like",
#DH parameters [meter]
"dh": [ A, C, E, F, -L ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}OffsetWrist_Y_SixAxis_Rokae_SR4_LikeJ2 +x 방향을 따라 옵셋)G), J5 -y방향을 따라 옵셋(L)
축 수 |
6축 |
구성 명칭 |
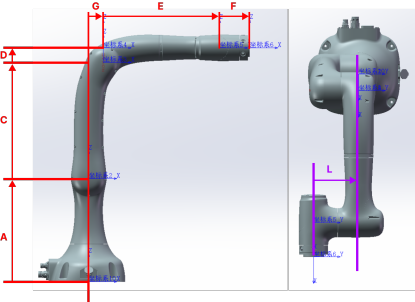
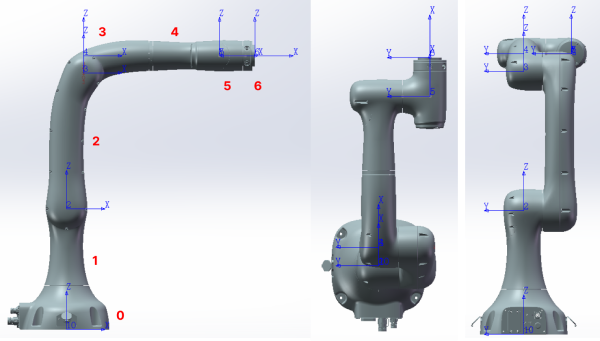
OffsetWrist_Y_SixAxis_Rokae_SR4_Like |
구성에 관한 설명 |
J2 +x 방향을 따라 옵셋)G), J5 -y방향을 따라 옵셋(L) |
dh 파라미터 그림 |
|
좌표계 각 축 이름 |
|
커넥팅 로드와 좌표계의 대응 관계 |
0: 좌표계 0, 1 |
1: 좌표계 0, 1 |
|
2: 좌표계 2 |
|
3: 좌표계 3 |
|
4: 좌표계 4 |
|
5: 좌표계 5 |
|
6: 좌표계 6 |
|
축 |
손목: 5, 6 |
아래팔: 3, 4 |
|
위팔: 2 |
|
베이스: 0, 1 |
|
모델 |
Rokae SR3, SR4 |
[robot]_algo 예시
{
"algo_type": "OffsetWrist_Y_SixAxis_ROKAE_SR4_Like",
#DH parameters [meter]
"dh": [ A, C, D, G, E, F, -L ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
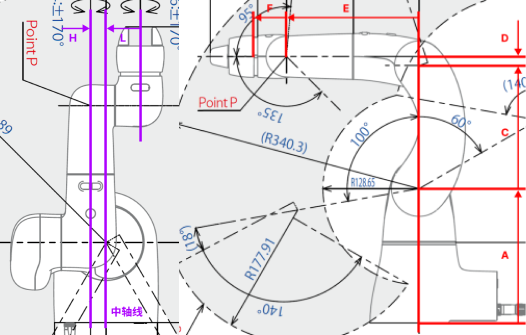
}OffsetWrist_Y_SixAxis_DENSO_COBOTTA_PRO_1300_Like J3 -y 방향을 따라 옵셋(H), J5 +y 방향을 따라 옵셋(L)
축 수 |
6축 |
구성 명칭 |
OffsetWrist_Y_SixAxis_DENSO_COBOTTA_PRO_1300_Like |
구성에 관한 설명 |
J3 -y 방향을 따라 옵셋(H), J5 +y 방향을 따라 옵셋(L) |
dh 파라미터 그림 |
|
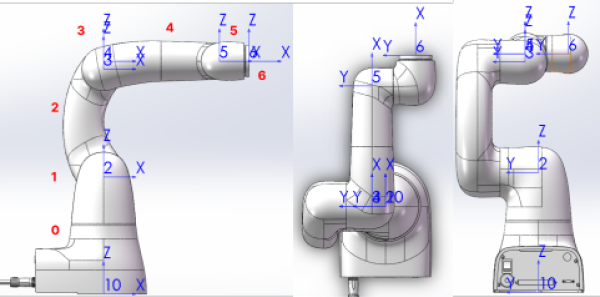
좌표계 각 축 이름 |
|
커넥팅 로드와 좌표계의 대응 관계 |
0: 좌표계 0, 1 |
1: 좌표계 0, 1 |
|
2: 좌표계 2 |
|
3: 좌표계 3, 4 |
|
4: 좌표계 3, 4 |
|
5: 좌표계 5 |
|
6: 좌표계 6 |
|
축 |
손목: 5, 6 |
아래팔: 3, 4 |
|
위팔: 2 |
|
베이스: 0, 1 |
|
모델 |
Denso COBOTTA PRO 900, COBOTTA PRO 1300 |
[robot]_algo 예시
{
"algo_type": "OffsetWrist_Y_SixAxis_DENSO_COBOTTA_PRO_1300_Like",
#DH parameters [meter]
"dh": [ A, C, E, F, -H, L ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}OffsetWrist_Y_SixAxis_DENSO_COBOTTA_Like J3+y, +z 방향을 따라 옵셋(H,D), J5 -y 방향을 따라 옵셋(L)
축 수 |
6축 |
구성 명칭 |
OffsetWrist_Y_SixAxis_DENSO_COBOTTA_Like |
구성에 관한 설명 |
J3+y, +z 방향을 따라 옵셋(H,D), J5 -y 방향을 따라 옵셋(L) |
dh 파라미터 그림 |
|
좌표계 각 축 이름 |
|
커넥팅 로드와 좌표계의 대응 관계 |
0: 좌표계 0, 1 |
1: 좌표계 0, 1 |
|
2: 좌표계 2 |
|
3: 좌표계 3, 4 |
|
4: 좌표계 3, 4 |
|
5: 좌표계 5 |
|
6: 좌표계 6 |
|
축 |
손목: 5, 6 |
아래팔: 3, 4 |
|
위팔: 2 |
|
베이스: 0, 1 |
|
모델 |
Denso COBOTTA |
[robot]_algo 예시
{
"algo_type": "OffsetWrist_Y_SixAxis_DENSO_COBOTTA_Like",
#DH parameters [meter]
"dh": [ A, C, D, E, F, H, -L ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}SOffsetWrist_Z_SixAxis_ABB_CRB15000_Like J5 +z 방향을 따라 옵셋(M)
축 수 |
6축 |
구성 명칭 |
OffsetWrist_Z_SixAxis_ABB_CRB15000_Like |
구성에 관한 설명 |
J5 +z 방향을 따라 옵셋(M) |
dh 파라미터 그림 |
|
좌표계 각 축 이름 |
|
커넥팅 로드와 좌표계의 대응 관계 |
0: 좌표계 0, 1 |
1: 좌표계 0, 1 |
|
2: 좌표계 2 |
|
3: 좌표계 3, 4 |
|
4: 좌표계 3, 4 |
|
5: 좌표계 5 |
|
6: 좌표계 6 |
|
축 |
손목: 5, 6 |
아래팔: 3, 4 |
|
위팔: 2 |
|
베이스: 0, 1 |
|
모델 |
ABB CRB15000-5/0.95 |
[robot]_algo 예시
{
"algo_type": "OffsetWrist_Z_SixAxis_ABB_CRB15000_5_0_95_Like",
#DH parameters [meter]
"dh": [ A, C, D, E, F, M ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}