출력
입력 및 출력
프로젝트의 결과-출력 스텝으로서, 이 스텝에는 출력 포트가 없고 입력 포트만 있습니다. 세 가지 포트 유형이 있으며, 다른 포트 유형은 다른 데이터 입력 포트에 해당합니다.
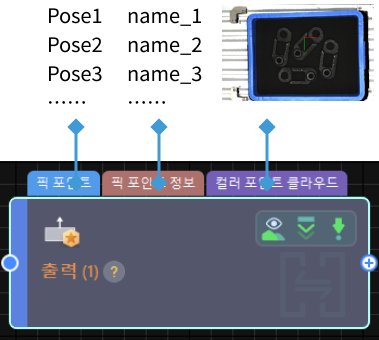
해당 스텝 중의 '사전 정의(비전 결과)' 포트 유형의 입력은 아래 그림과 같습니다.
파라미터 설명
포트 유형 설정
- 포트 유형
-
파라미터 설명: 이 파라미터는 스텝의 포트 유형을 선택하는 데 사용됩니다.
값 리스트: 사전 정의(비전 결과), 사전 정의(로봇 경로), 사용자 정의
-
사전 정의(비전 결과): Mech-Vision만 사용하여 비전 처리를 수행하고 비전 결과를 Mech-Viz 또는 외부 서비스로 보낼 경우에, 이 포트 유형을 선택하는 것이 좋습니다.
-
사전 정의(로봇 경로): Mech-Vision을 사용하여 비전 처리와 경로 계획을 수행하는 경우, 이 포트 유형을 선택하는 것이 좋습니다.
-
사용자 정의: Mech-Viz로 전송되는 데이터를 사용자 지정해야 하는 경우 이 포트 유형을 선택하는 것이 좋습니다.
기본값: 사전 정의(로봇 경로)
조정 설명: 실제 수요에 맞춰 적합한 포트 유형을 선택하십시오.
-
사전 정의(비전 결과)
이 포트 유형은 마스터 컨트롤, 표준 인터페이스 또는 Adapter 통신에 모두 적합합니다.
마스터 컨트롤 통신을 선택한 경우, 비전 시스템은 비전 결과를 로봇으로 전송합니다.
표준 인터페이스 또는 Adapter 통신을 선택한 경우, 비전 시스템은 외부 장치(예: 로봇, PLC 또는 마스터 컴퓨터 등)에서 보내 온 명령어를 수신하고 비전 결과를 외부 장치로 전송합니다.
응용 시나리오
- 시나리오 선택
-
파라미터 설명: 현재 솔루션의 응용 시나리오를 선택합니다.
값 리스트: 매칭, 디팔레타이징, 기타
-
매칭: 대상 물체 편집기에서 대상 물체를 생성하고 해당 포즈를 포인트 클라우드 모델 매칭을 통해 얻는 시나리오에 적합합니다.
-
디팔레타이징: 포인트 클라우드 모델 매칭 없이 딥 러닝이나 다른 방법을 통해 대상 물체의 포즈를 직접 얻을 수 있는 디팔레타이징 시나리오에 적합합니다.
-
기타: 위 두 시나리오 이외의 방법을 통해 대상 물체의 포즈를 얻는 시나리오에 적합합니다.
기본값: 매칭
-
- 데이터 변환 방법
-
파라미터 설명: 이 스텝은 결과의 변환 방법을 선택하여 인식 결과를 피킹에 필요한 데이터 유형으로 전환할 수 있습니다.
값 리스트: Generate picking strategy based on object center point, generate picking strategy based on pick points
기본값: Generate picking strategy based on object center point
충돌 감지 설정
- 포인트 클라우드를 외부 서비스로 보내기
-
파라미터 설명: 이 파라미터는 포인트 클라우드를 Mech-Viz로 전송할 수 있습니다. 일반적으로 프로젝트 디버깅 단계 또는 프로젝트 실행 결과를 확인하는 데 사용됩니다.
기본값: 선택되어 있음
- 포인트 클라우드 유형
-
설명: 이 파라미터는 Mech-Viz로 전송되는 포인트 클라우드의 유형을 선택하는 데 사용됩니다.
값 리스트: CloudXYZRGB(컬러 포인트 클라우드), CloudXYZ(포인트 클라우드), CloudXYZNormal(법선 방향을 갖춘 포인트 클라우드)
기본값: CloudXYZRGB
- 입력된 포인트 클라우드가 카메라 좌표계에 있는지 여부 판단
-
파라미터 설명: 포인트 클라우드가 카메라 좌표계에 있는 경우, 이 파라미터를 선택해야 합니다. 이 파라미터를 선택하면, 포인트 클라우드가 로봇 기준 좌표계로 전환하고 Mech-Viz에 전송됩니다. 이 파라미터를 선택하지 않으면, 카메라 좌표계에 있는 포인트 클라우드가 직접 Mech-Viz로 전송됩니다.
기본값: 선택되어 있음
- 대상 물체의 포인트 클라우드 제거
-
파라미터 설명: 이 파라미터는 대상 물체와 겹치는 부분의 포인트 클라우드를 제거하고 그리퍼와 이 부분 포인트 클라우드 간의 충돌을 최대한 방지하는 데 사용됩니다.
기본값: 선택하지 않음
- 대상 물체 포인트 클라우드의 검색 반경
-
파라미터 설명: 대상 물체의 포인트 클라우드에 있는 임의의 점을 중심으로 삼고, 검색 반경 내에 있는 포인트 클라우드가 제거됩니다. 대상 물체의 포인트 클라우드 제거 파라미터를 선택한 후, 이 파라미터를 설정해야 합니다.
기본값: 3 mm
기타 입력 설정
- 기타 입력
-
파라미터 설명: 이 파라미터를 선택하면, 스텝에 '픽 포인트 레이블', '대상 물체 치수’와 '픽 포인트 옵셋’이라는 세 가지 입력 포트가 새로 추가됩니다.
기본값: 선택하지 않음
파라미터 설명: 이 파라미터를 선택한 후에는 새 입력 포트에 데이터 입력이 있는지 확인하십시오. 그렇지 않으면 '출력' 스텝 실행에 실패할 수도 있습니다.
시나리오 물체 업데이트 설정
- 시나리오 물체 업데이트
-
파라미터 설명: 이 파라미터는 일반적으로 빈의 포즈를 동적으로 업데이트해야 하는 시나리오에 적용됩니다. 이 파라미터를 선택한 후, 스텝에 '시나리오 물체 이름', '시나리오 물체 치수’와 '시나리오 물체 포즈’라는 세 가지 포트가 새로 추가됩니다.
기본값: 선택하지 않음
정확도 드리프트 보정
- 비전 시스템의 정확도 드리프트 보정
-
파라미터 설명: 이 파라미터를 선택한 후, 비전 시스템의 정확도 드리프트를 자동으로 보정합니다. 이 파라미터는 오차 분석 도구의 EIH/ETH 비전 시스템의 정확도 드리프트 자동 보정 기능이 배포된 후에만 표시됩니다.
기본값: 선택되어 있음
조정 설명: EIH/ETH 비전 시스템의 정확도 드리프트 자동 보정 기능이 배포된 후, 이 파라미터를 선택하여 자동 보정을 시작할 수 있습니다.
사전 정의(로봇 경로)
이 포트 유형은 표준 인터페이스 또는 Adapter 통신 모드에 적합합니다. 외부 장치(예: 로봇, PLC 또는 마스터 컴퓨터 등)가 비전 시스템에 명령어를 보내고 비전 시스템은 계획된 웨이포인트를 외부 장치로 반환합니다.
이 포트 유형을 선택한 후, 파라미터를 조정할 필요가 없이 로봇 경로를 입력하는 포트만 연결하면 됩니다.
자체 정의
이 포트 유형은 표준 인터페이스 또는 Adapter 통신 모드에 적합합니다. 외부 장치(예: 로봇, PLC 또는 마스터 컴퓨터 등)가 비전 시스템에 명령어를 보내고 비전 시스템은 계획된 웨이포인트를 외부 장치로 반환합니다.
이 포트 유형을 선택한 후, 미리 정의된 통신 키와 사용자 정의한 통신 키를 사용할 수 있습니다. 일반적으로 미리 정의된 통신 키를 사용하는 것이 더 좋습니다. 미리 정의된 통신 키가 사용자가 정의한 통신 명령어의 요구 사항을 충족하지 못하는 경우, 사용자 정의한 통신 키를 사용할 수 있습니다.
- 사용자 정의한 포트 명칭
-
파라미터 설명: 이 파라미터는 입력 포트를 자체적으로 정의하는 데 사용됩니다.
조정 설명: 편집기를 열기 버튼을 클릭하여 '출력 설정 도우미' 창에서 추가하려는 입력 포트를 선택합니다.
입력 포트 설명 비고 poses
물체 포즈. 배열 형식.
필수
labels
물체 레이블. poses와 동일한 길이의 배열 형식.
선택사항
sizes
poses와 길이가 같거나 길이가 0인 물체의 3D 치수.
선택사항
offsets
물체 중심점을 기준으로 픽 포인트의 옵셋. poses와 길이가 같거나 길이가 0인 배열 형식.
선택사항
objectIndexes
물체의 인덱스. poses와 길이가 같거나 길이가 0인 배열 형식.
선택사항
scene_object_names
업데이트될 시나리오 물체의 이름 리스트.
선택사항
scene_object_sizes
업데이트될 시나리오 물체의 치수 리스트.
선택사항
scene_object_poses
업데이트될 시나리오 물체의 포즈 리스트.
선택사항
workobject_data
Mech-Viz로 전송되는 대상 물체 관련 정보. 예를 들어, 픽 포인트 정보( 픽 포인트 숫자 레이블, 물체 중심점을 기준으로 픽 포인트의 옵셋 등) 및 각 픽 포인트가 위치한 대상 물체에 대한 정보가 포함됩니다.
선택사항
|
'workobject_data' 입력 포트만 추가한 경우, 100, 102, 105 및 110 표준 인터페이스 명령어를 호출할 때 데이터를 가져올 수 없습니다. |