内部パラメータツール
カメラ に内部パラメータが正確かをチェック・補正します。内部パラメータが正しくなければ、正確な点の座標を計算できません。
メニューバーのツールメニューをクリックして内部パラメータウィンドウを開きます。このウィンドウでは内部パラメータのチェックと修正を行います。
カメラの内部パラメータをチェック
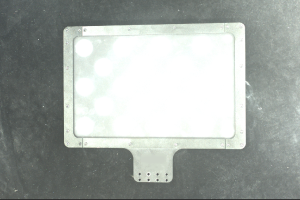
| まず、キャリブレーションボードの型番を選択を参考してお使いの カメラ 型番と現場の撮影距離に応じてキャリブレーションボードを選択します。 |
内部パラメータをチェックする手順
内部パラメータツールを使用してカメラ内部パラメータをチェックするとき、以下の手順を実行します。
-
1.キャリブレーションボードを配置して画像の品質をチェックするで 2D 画像と深度画像をが画像要件を満たしているか確認します。
-
キャリブレーションボードをカメラ視野に設置します。カメラの推奨ワーキングディスタンス以内に、かつカメラ光軸に垂直するように設置してください。

-
画像取得ボタンをクリックしてキャリブレーションボードの 2D 画像と深度画像を取得します。取得した 2D 画像と深度画像が以下の要件をを満たしていることを確認してください。
-
ボードの円はいずれも完全に写っています。
-
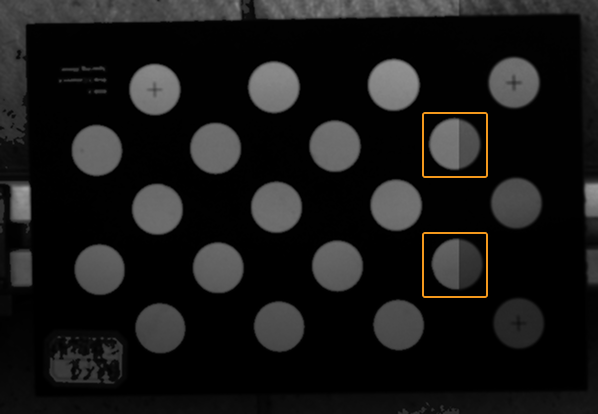
2D 画像では、ボードの輝度が均一で、過度に明るくても暗くてもなく、円はいずれも完全ではっきり見られます。
-
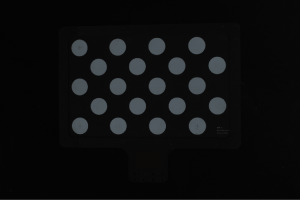
深度画像では、ボードの円はいずれも完全に写っています。
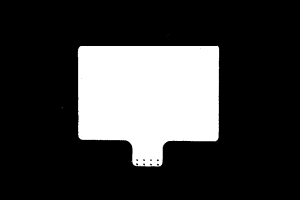
キャリブレーションボードの 2D 画像は下図のようです:
画像が暗くて、キャリブレーションボードの円ははっきり見えない 画像の輝度が均一ではなくボードの円ははっきり見えない キャリブレーションボードの円は完全でエッジもはっきり見える 画像が明るすぎてキャリブレーションボードの円ははっきり見えない 
取得した 2D 画像が画像要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整してください。
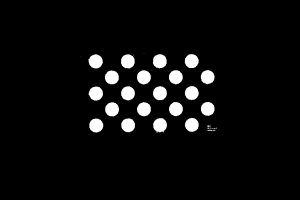
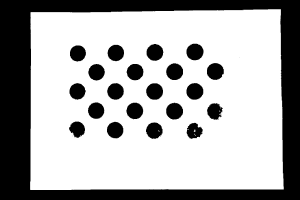
キャリブレーションボードの深度画像は下図のようです:
露出時間が短くて円は完全に撮れない 円/キャリブレーションボードは完全に撮れる 露出時間が長くて円は完全に撮れない 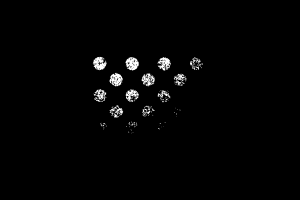
取得した深度画像が画像要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考して 3D パラメータを調整してください。
より詳細なパラメータ調整ガイドは、パラメータをお読みください。
-
-
-
2. キャリブレーションボードの型番を選択するでキャリブレーションボードの型番を設定します:
-
標準仕様のキャリブレーションボードを使用する場合、キャリブレーションボードの種類を標準に設定し、ボードのラベルに従って型番を選択してください。
-
オーダーメードのキャリブレーションボードを使用する場合、キャリブレーションボードの種類をオーダーメードに設定し、キャリブレーションボードのタイプを選択し、行数と列数、間隔の値を設定してください。
-
-
3.内部パラメータのチェック・処理 の 内部パラメータをチェック をクリックして、カメラ の内部パラメータをチェックします。チェックが完了するとチェックの結果が表示されます。
-
エラーメッセージが表示された場合、以下の内容に従って解決してください。
問題の解決
内部パラメータをチェックするとき、以下のような問題が発生することがあります:
内部パラメータチェックの結果が大きい
問題:
内部パラメータチェックの結果は赤色に表示され、カメラ 内部パラメータチェックの結果が大きいです。
解決法:
以下のように解決してください:
-
キャリブレーションボードの型番または種類を確認します。
-
キャリブレーションボードが間違っている場合、正しい型番または種類を入力してください。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
キャリブレーションボードが正確な場合、次のステップを実行します。
-
-
2D 画像または深度画像が要件を満たしているかをチェックします。2D 画像と深度画像の要件をお読みください。
-
2D 画像が要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整してください。深度画像が要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考して 3D パラメータを調整してください。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
画像が要件を満たしている場合、次のステップを実行します。
-
-
カメラ がその他のデバイスの衝突による故障や損傷があるか確認したうえ、テクニカルサポートにお問い合わせください。
キャリブレーションボードの円を検出できない
問題:
内部パラメータチェックの結果にキャリブレーションボードの白い円を検出できませんでしたが表示されます。
解決法:
以下のように解決してください:
-
キャリブレーションボードの型番または種類を確認します。
-
キャリブレーションボードが間違っている場合、正しい型番または種類を入力してください。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
キャリブレーションボードが正確な場合、次のステップを実行します。
-
-
2D 画像または深度画像が要件を満たしているかをチェックします。2D 画像と深度画像の要件をお読みください。
-
2D 画像が要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整してください。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
画像が要件を満たしている場合、次のステップを実行します。
-
-
補助円を描画するか、特徴検出パラメータを編集(詳細)します。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
内部パラメータをのチェックに成功したら問題解決が完了します。
-
それでも内部パラメータチェックの結果にキャリブレーションボードの白い円を検出できませんでしたが表示される場合、テクニカルサポートにお問い合わせください。
-
補助円を作成
キャリブレーションボードの円を検出できないという問題を解決できます。
補助円を作成機能を使用するには、以下の手順を実行してください:
-
3.内部パラメータのチェック・処理の補助円を作成ボタンをクリックします。
-
2D 画像で比較的に完全な円を選択します。
-
Ctrlを押したまま円心を左クリックします。
-
カーソルを移動してCtrlを押したままクリックして円を生成します。
-
-
3.内部パラメータのチェック・処理 の 内部パラメータをチェック をクリックして、カメラ の内部パラメータを再度チェックします。
|
特徴検出パラメータを編集(詳細)
キャリブレーションボードの円を検出できないという問題を解決できます。
特徴検出パラメータを編集(詳細)機能を使用したい場合、以下の手順を実行してください:
-
3.内部パラメータのチェック・処理の特徴検出パラメータを編集(詳細)をクリックします。
-
実際に応じて特徴検出パラメータを調整します。
-
キャリブレーションボードの円を完全に撮れない場合、一部に円の欠落を許可をチェックし、追加した特徴検出パラメータを調整します。
-
3.内部パラメータのチェック・処理 の 内部パラメータをチェックをクリックして、カメラ の内部パラメータを再度チェックします。
深度画像に有効な特徴点がない
問題:
内部パラメータチェックの結果に深度画像に有効な特徴点はありませんが表示されます。
解決法:
深度画像が要件を満たしているかをチェックします。2D 画像と深度画像の要件をお読みください。
-
取得した深度画像が画像要件を満たさない場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考して 3D パラメータを調整してください。それから、再度内部パラメータをチェックをクリックし、カメラ の内部パラメータをチェックします。
-
深度画像が要件を満たしている場合、テクニカルサポートにお問い合わせください。
2D 画像の露出が不適切
問題:
ソフトウェアのメッセージパネルに 2D 画像が過度に明るいまたは暗い、輝度にばらつきが発生した、画像の要件を満たしませんと表示されます。
| より正確なチェック結果を取得するために、以下の解決法を試してパラメータを調整してください。 |
解決法:
以下のように解決してください:
-
2D 画像が過度に明るいまたは暗い場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整します。
-
2D 画像輝度にばらつきが発生した場合、2D 画像の輝度ばらつきを参考して調整します。
キャリブレーションボードの円の面積が小さい
問題:
ソフトウェアのメッセージパネルにキャリブレーションボードの円がカメラ視野内に小さすぎると表示されます。
| より正確なチェック結果を取得するために、以下の解決法を試してパラメータを調整してください。 |
解決法:
-
解像度を改善する場合、画像の解像度を修正を参考して調整します。
-
使用しているキャリブレーションボードの寸法が小さい場合、より大きいものに交換します。
内部パラメータ修正
内部パラメータの誤差が大きいという問題を解決できます。以下のシーンに内部パラメータ修正機能を使用してください。
-
内部パラメータのチェック結果にスカラー差値が以下の値を超えた場合。
-
カメラ精度が要件を満たさない場合。
| 型番 | スカラー差 |
|---|---|
DEEP |
0.6% |
LSR L、LSR S、Laser L Enhanced |
0.5% |
LSR XL |
0.4% |
PRO M、PRO S、PRO XS、NANO、NANO ULTRA |
0.3% |
|
内部パラメータチェックに異常がなければ、修正を開始ボタンをクリックし、内部パラメータを修正ウィンドウを開いて修正を行います。
キャリブレーションボードを配置
内部パラメータ修正 機能を使用するとき、以下のようにキャリブレーションボードを配置してください。
-
キャリブレーションボードをカメラ光軸に垂直するようにします。
-
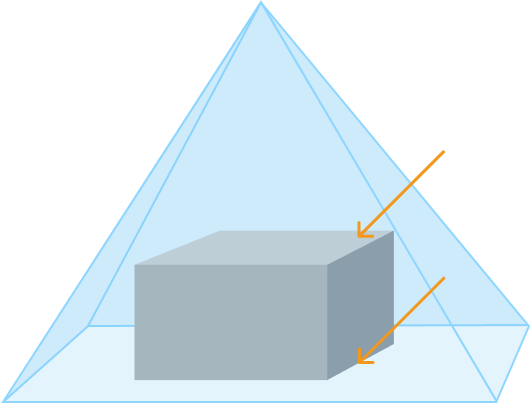
ボードを対象物の上面(平面1)と底面(平面2)に配置します。平面 1 と平面 2 の高さの差が 100mm 以上にします。
例:コンテナからのピッキングやデパレタイジング・パレタイジングの現場では、キャリブレーションボードをコンテナまたはパレットの上表面あるいは底面に配置します。
-
キャリブレーションボードがカメラ視野内に配置します。
このツールは、キャリブレーションボードがカメラ視野内にあることを確保する補助的機能が利用可能です。使用したい場合は、次の手順に従ってください。
-
画像収集を開始ボタンをクリックし、キャリブレーションボードをこの平面で移動します。2D 画像と深度画像が一定の頻度(約 5 秒)で更新されます。
-
2D 画像と深度画像が完全であれば、この位置はカメラ視野内にあります。2D 画像と深度画像が完全でなければ、この位置が視野内から外れている可能性があります。
-
カメラがこの平面の視野を確認できたら、画像収集を中止をクリックします。次の内容を参考して続けてこの平面のデータを追加します。
-
それから同じ手順で次の平面のデータを追加します。
-
画像収集のボタンをクリックしたら他のボタンが一時使用できなくなります。
-
データを収集・検証
平面 1 と平面 2 でキャリブレーションボードを移動し、データ収集をクリックして異なる位置のデータを収集します。検証に問題がないデータは、有効データとして使えます。検証の基準は以下のようです。
| 検証項目 | 値 |
|---|---|
最小面積カバー率 |
25% |
最小長さカバー率 |
50% |
最小幅カバー率 |
50% |
最小データセット数 |
3 |
収集している時に、以下のことに注意してください。
-
まず平面 1 にデータを収集し、それから平面 2 のデータを収集してください。
-
平面 2 にデータがある時に平面 1 のデータを修正できません。
-
2つの平面のデータを収集完了し、かつ検証に問題がなければ、内部パラメータチェックを修正をクリックして修正を開始します。
| 収集したデータの検証に問題がないように、収集済みデータのカバー範囲を利用してキャリブレーションボードの位置を調整できます。 |
平面 1 と平面 2 のデータを検証して問題がなければ、内部パラメータを修正ボタンをクリックして修正を開始します。エラーメッセージが表示された場合、以下の内容に従って解決してください。
正常に修正できた場合、内部パラメータ修正の結果ウィンドウの内部パラメータ更新をクリックして修正後のパラメータを適用します。
正常に修正できない場合、表示された指示に従ってください。
問題の解決
内部パラメータをチェックするとき、以下のような問題が発生することがあります。
キャリブレーションボードの円を検出できない
問題:
ソフトウェアのメッセージパネルにキャリブレーションボードの円を認識できませんでしたと表示されます。
解決法:
以下のように解決してください:
-
キャリブレーションボードがカメラ視野内にあるか確認します。
-
範囲外の場合にそれを移動します。それからデータ収集をクリックしてデータを収集します。
-
キャリブレーションボードが全てのカメラ視野内にある場合に次の手順に進んでください。
-
-
2D 画像または深度画像が要件を満たしているかをチェックします。2D 画像と深度画像の要件をお読みください。
-
2D 画像が過度に明るいまたは暗い場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整します。それからデータ収集をクリックしてデータを収集します。
-
2D 画像輝度にばらつきが発生した場合、2D 画像の輝度ばらつきを参考して調整します。それからデータ収集をクリックしてデータを収集します。
-
画像が要件を満たしている場合、次のステップを実行します。
-
-
それでも問題が解決しない場合は、テクニカルファイルを保存してテクニカルサポートにお問い合わせください。
キャリブレーションボードの円を全部検出できない
問題:
ソフトウェアのメッセージパネルにキャリブレーションボードのn個の円を認識する必要がありますがm個しか認識できませんと表示されます。
解決法:
-
キャリブレーションボードがカメラ視野とプロジェクター投光範囲内にあるか確認します。
-
カメラ視野とプロジェクター投光範囲内にない場合、ボードの位置を調整してから3Dパラメータをチェックします。それからデータ収集をクリックしてデータを収集します。
-
カメラ視野とプロジェクター投光範囲内にある場合、次の手順に進んでください。
-
-
それでも問題が解決しない場合は、テクニカルファイルを保存してテクニカルサポートにお問い合わせください。
収集したデータが平面にない
問題:
ソフトウェアのメッセージパネルに収集したデータはこの平面にありませんと表示されます。現在取得したデータの平面のカメラまでの距離は、平面とカメラの距離範囲の許容値から外れています。
解決法:
-
キャリブレーションボードの位置を調整します。それからデータ収集をクリックしてデータを収集します。
-
それでも問題が解決しない場合は、テクニカルファイルを保存してテクニカルサポートにお問い合わせください。
現在のデータ誤差が大きすぎる
問題:
ソフトウェアのメッセージパネルに現在のデータ誤差が大きすぎますと表示されます。
解決法:
以下のように解決してください:
-
カメラ視野内には複数枚のキャリブレーションボードがあるかチェックします。
-
複数枚ある場合、余計のものを取り除いてください。それからデータ収集をクリックしてデータを収集します。
-
使用するボードだけがある場合、次の手順に進んでください。
-
-
2D 画像または深度画像が要件を満たしているかをチェックします。2D 画像と深度画像の要件をお読みください。
-
2D 画像が過度に明るいまたは暗い場合、キャリブレーション時に 2D と 3D 露出パラメータを調整を参考してパラメータを調整します。それからデータ収集をクリックしてデータを収集します。
-
2D 画像輝度にばらつきが発生した場合、2D 画像の輝度ばらつきを参考して調整します。それからデータ収集をクリックしてデータを収集します。
-
画像が要件を満たしている場合、次のステップを実行します。
-
-
キャリブレーションボードがカメラ視野とプロジェクター投光範囲内にあるか確認します。
-
カメラ視野とプロジェクター投光範囲内にない場合、ボードの位置を調整してから3Dパラメータをチェックします。それからデータ収集をクリックしてデータを収集します。
-
カメラ視野とプロジェクター投光範囲内にある場合、次の手順に進んでください。
-
-
それでも問題が解決しない場合は、テクニカルファイルを保存してテクニカルサポートにお問い合わせください。