TCP ASCIIによる外部機器とMech-MSRとの通信実装
通信フロー(コマンドに基づく)
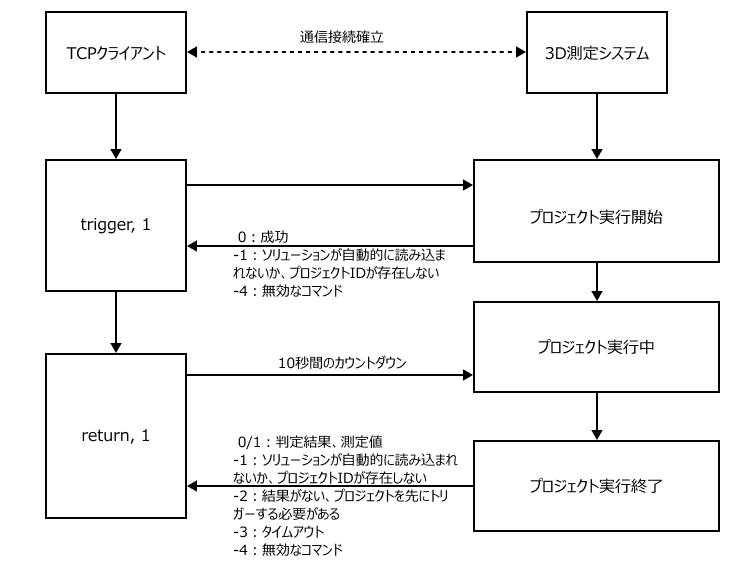
TCP ASCII通信(コマンドに基づく)は、下図のようなフローで行います。
|
通信フローは以下の通りです。
-
TCPクライアント(例:PLC)が、3D測定システム(Mech-MSR)とTCP通信接続を確立します。
-
TCPクライアントが
triggerコマンドを送信して、プロジェクトの実行をトリガーします。 -
Mech-MSRは、コマンドのステータスコードを返します。例えば、プロジェクトの実行が正常にトリガーされた場合、Mech-MSRは
0を返します。 -
TCPクライアントが
returnコマンドを送信して測定結果を取得します。Mech-MSRはコマンドを受信すると、10秒間のカウントダウンを開始します。 -
Mech-MSRが結果を返します。例えば、プロジェクトの実行が正常に完了すると、Mech-MSRは測定結果を返します。10秒内にプロジェクトの実行が終了しなかった場合、Mech-MSRはエラーコード
-3を返します。
通信フロー(コマンドなし)
TCP ASCII通信では、毎回のプロジェクト実行後に、3D測定システム(Mech-MSR)が結果を自動でクライアント(例:PLC)に送信することも可能です。この方式では、クライアントからのリクエストコマンドは不要で、結果が自動で受信されます。プロファイル測定器が 連続キャプチャモード で動作している場合、または I/O端子からプロジェクトをトリガーする 場合に適しています。
通信フローは以下の通りです。
-
TCP ASCII通信設定 時に、結果自動送信 にチェックを入れます。
-
returnコマンドのデータ形式 を設定します。Mech-MSRはその形式に従って結果を自動送信します。
-
(オプション)プロジェクトの実行条件を設定します。例えば、プロジェクトツールバー で 画像更新時に実行 を有効にします。
-
TCPクライアントが3D測定システムと通信接続を確立します。
-
毎回プロジェクトが実行完了すると、Mech-MSRは結果を自動でクライアントに送信します。
TCP ASCIIがサポートするコマンドと返される結果の詳細な説明については、TCP ASCIIコマンド説明 をお読みください。