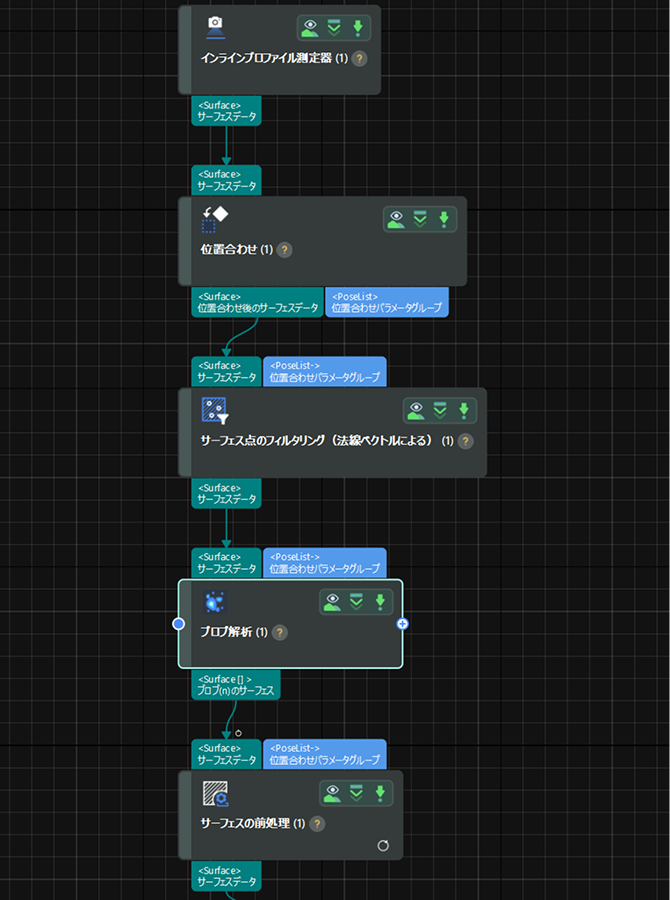
データ処理
取得したサーフェスデータの位置に誤差があり、無用なデータやノイズが存在する可能性があります。従って、測定する前にサーフェスデータに対して、位置合わせ・フィルタリング及びノイズ除去を行うことにより、データの品質を向上させます。
前処理の流れ:位置合わせ ➡ フィルタリング ➡ 大まかな位置決め ➡ 再度フィルタリング
(一)位置合わせ
異なるワークをスキャンする際、画像データにおけるワークの位置に微小な変動が生じる可能性があります。対処法として、共通の特徴を抽出し異なる画像を位置合わせすることで、後続の測定の一貫性を確保できます。
位置合わせステップの使用フローは以下の通りです。
-
マッチングモデルを作成:モデルを編集ボタンをクリックして「2D モデルエディタ」ウィンドウを開きます。画像から代表的かつ共通の特徴を選択してモデルを作成します。
詳しい説明は、2Dモデルエディタ をご参照ください。 -
ステップのパラメータを設定:モデルを選択後、そのステップのパラメータパネルでその他のパラメータを調整できます(通常はデフォルト設定のままにしておけば問題ありません)。出力パネルのサーフェスデータ項目にチェックが入っていることを確認してください。
-
位置合わせ済みのデータを出力:ステップを実行すると、位置合わせ済みのデータが出力されます。
- デバック経験:
-
-
2D マッチングモデルは、画像の位置合わせに非常に重要です。モデルを作成する際、点群の品質が安定しており、特徴の類似性が低く、かつ画像のX/Y方向を効果的に制約可能のエッジを特徴として選択してください。
-
画像処理のサイクルタイムを短縮するには、2D モデルエディタウィンドウの右側にある「特徴パラメータ」欄で、角度とスケールの範囲を適切に縮小することをお勧めします。例えば、ワークの供給角度偏差が 5°以内の場合、「角度範囲」を ±5° に設定することで、特徴マッチングの高速化が可能です。より詳しいパラメータ説明については、特徴パラメータ説明をご参照ください。
-
特徴の選定が困難な場合、画像右側の深度範囲設定スライダをドラッグし、エッジ特徴を強調表示することで、特徴の選択を容易に行えます。
-
(二)フィルタリング
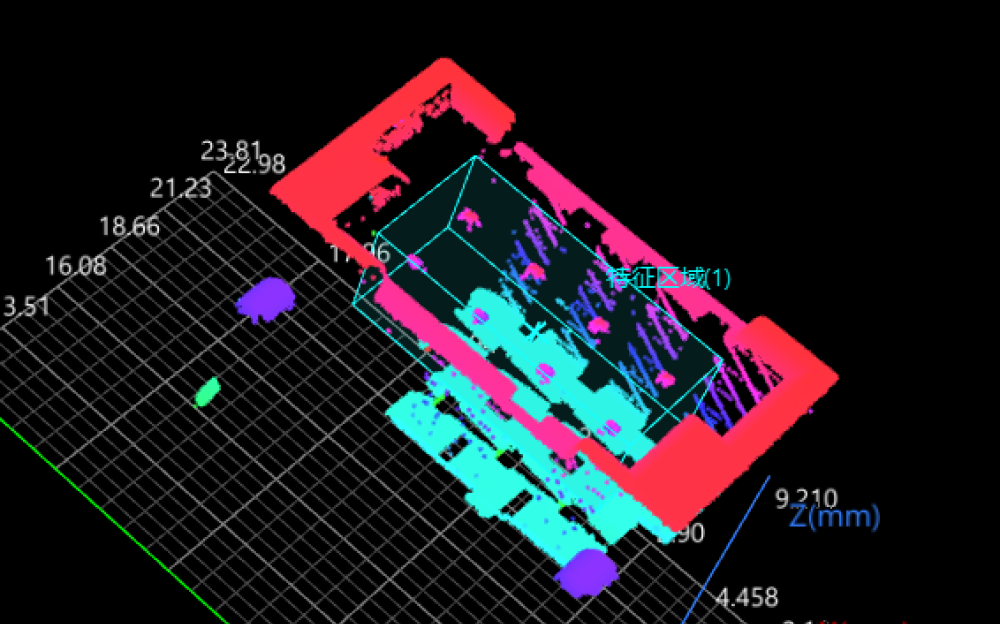
位置合わせ後のサーフェスデータに対しサーフェス点のフィルタリング(法線ベクトルによる)ステップを適用し、ピン先端データを抽出し、予備ノイズ除去を行います。
-
特徴領域を使用してピンのデータを指定します。
-
このステップでパラメータを調整して予備ノイズ除去を行います。
このステップを実行した後、フィルタリング処理したサーフェスデータを出力されます。
- デバック経験:
-
-
サーフェス点のフィルタリング(法線ベクトルによる)ステップは効果的にノイズを除去できます。特に平坦なサーフェスデータを取得する場合は効果的です。ノイズが傾いていたり、不規則に分散している場合、このステップを行うことで、より良いノイズ除去結果を得ることができます。

-
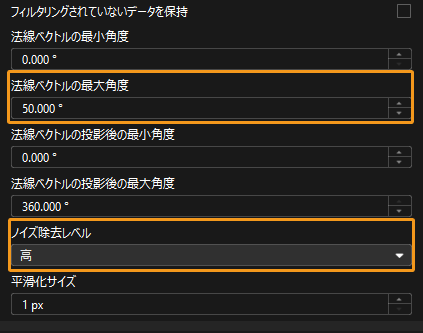
パラメータの法線ベクトルの最大角度を調整(60°程度を推奨)することで、異なる傾斜度のノイズを除去できます。ノイズ除去レベルを調整することで、ランダムに分散しているノイズを除去できます。この2つのパラメータを合わせて使用すると、良好な除去効果が得られます。より詳しいパラメータ説明については、角度フィルタリング関連パラメータをご参照ください。
-
(三)大まかな位置決め
ブロブ解析ステップを実行して、フィルタリングされた初期データからピン先端の大まかな位置を認識します。
-
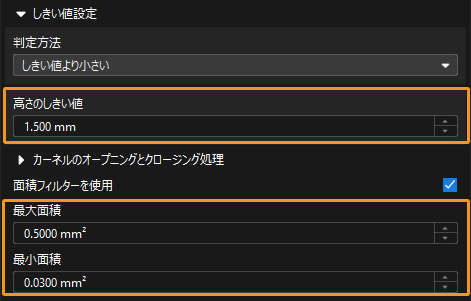
このステップのパラメータパネルで、適切な高さ・面積のしきい値を設定し、サーフェスデータからピン先端のデータ(複数のブロブ)を検出します。
-
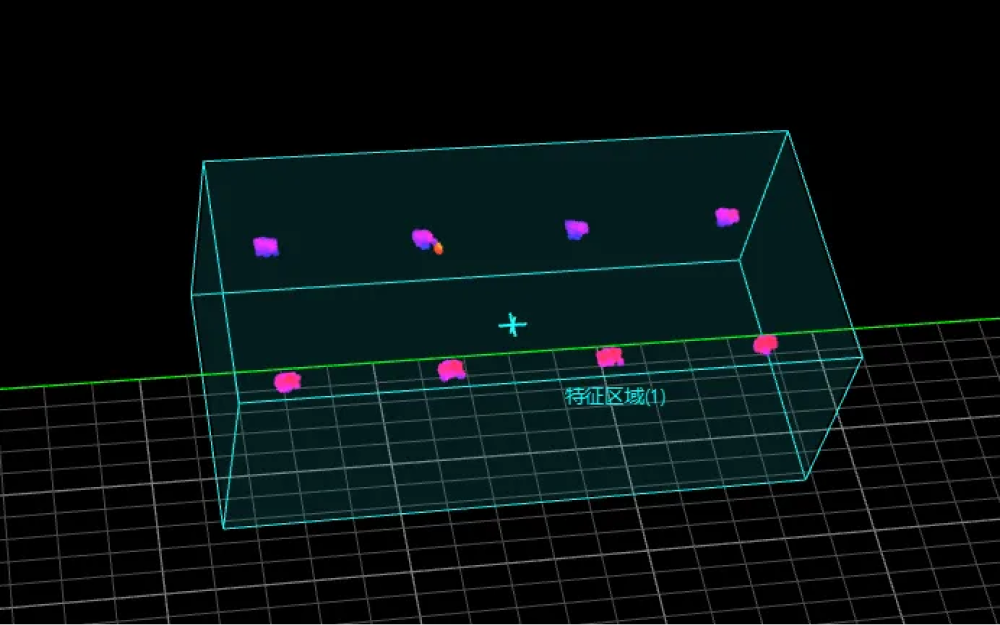
ソート方法を指定し、検出したブロブに番号を付けます。これで各ブロブを精確に位置決めできます。
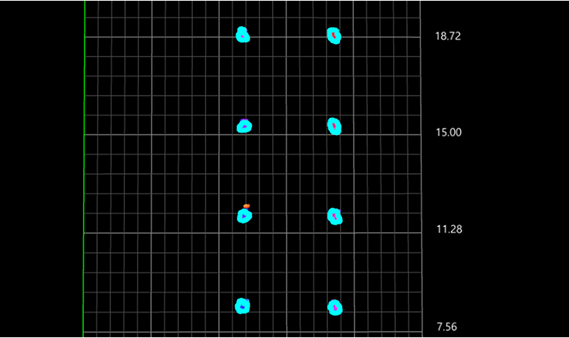
図に示すように、「位置X(大きいから小さいへ)」でソート。ブロブ番号(インデックス)はご参考のみ。
実際の状況に応じてソート方法を設定してください。 - デバック経験:
-
-
ブロブ解析は、ピン先端ごとに位置決めし、そのデータを出力するための重要なステップです。通常、適切な高さ・面積のしきい値を設定すれば、高品質なピン先端データが得られます。
-
ブロブデータの付着現象が発生した際、前処理段階のフィルタリングでこの課題に対処可能です。
-
(四)再度フィルタリング
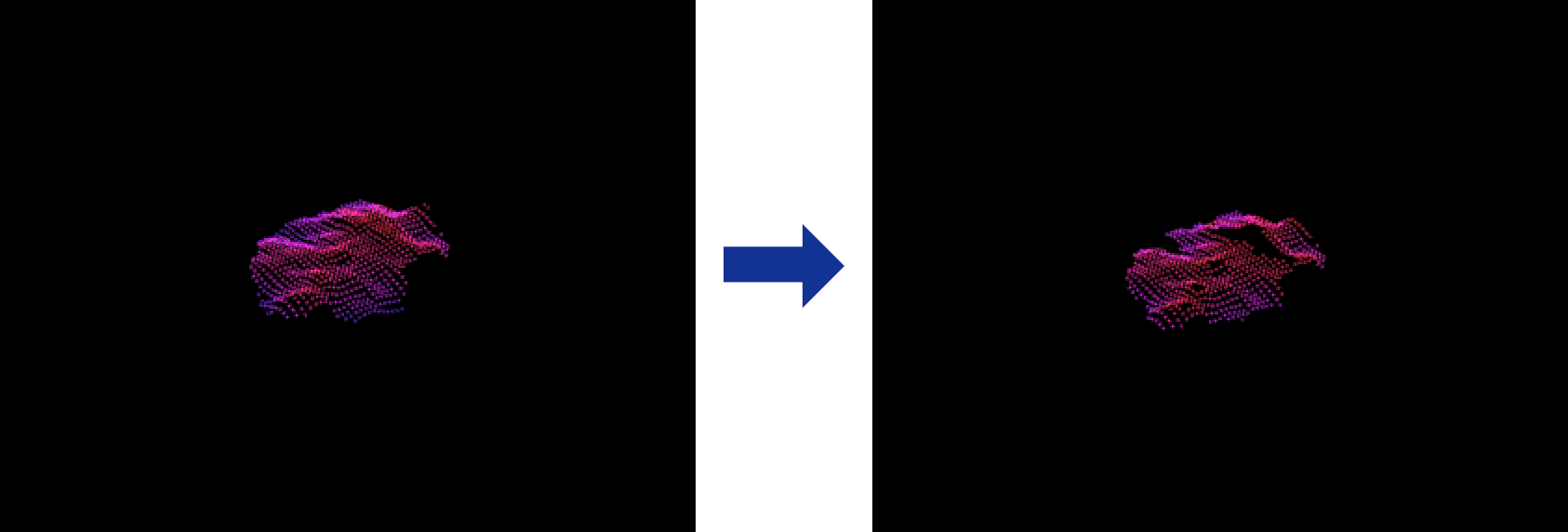
サーフェスの前処理ステップを実行して、大まかな位置決めから得られたピン先端のデータに対してフィルタリングを行います。データ中の極大点と極小点を除去することで、データ変動を効果的に低減できます。
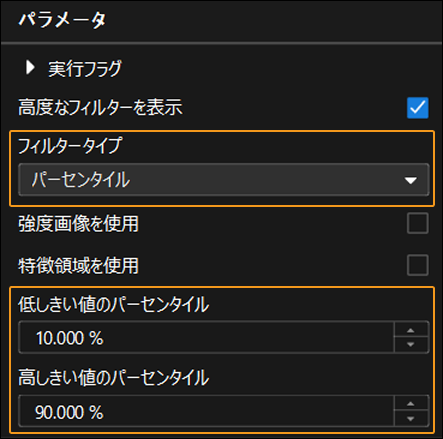
フィルタータイプをパーセンタイルに設定し、パーセンタイルの下限しきい値と上限しきい値をそれぞれ10%と90%に設定します。
このステップを実行すると、フィルタリング処理されたサーフェスデータを取得できます。
続いては、ピンの高さ測定を始めます。