スキャンモード
本節ではスキャンモードのパラメータを紹介します。
1. トリガー設定
トリガーソースを選択して関連するパラメータを設定します。
| スキャンモードでインラインプロファイル測定器によるデータ収集をトリガーする方法については、データ収集をトリガーする方法とデータ収集をトリガーするプロセスをお読みください。 |
1.1. データ収集トリガー信号ソース
パラメータ説明 |
データ収集をトリガーする信号ソースを選択する。一回スキャンする時に複数本のデータを取得して複数本のプロファイルを生成し、プロファイルによって 1 枚の強度画像と深度画像を生成する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
外部入力信号を使用してデータ収集をトリガーする場合、外部トリガーを選択してください。それ以外の場合、ソフトトリガーを選択してください
|
1.2. ラインスキャントリガーソース
パラメータ説明 |
一本のラインのスキャンをトリガーする信号ソースを選択する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
すると、トリガー設定には異なるパラメータが表示される: |
1.3. エンコーダー設定
ラインスキャントリガーソースをエンコーダーに設定した場合、このクラスのパラメータを調整する必要があります。
編集ボタンをクリックするとエンコーダー設定ウィンドウが表示されます。エンコーダー値と運動方向を確認し、エンコーダーの解像度を計算します。
スキャンデータの Y 軸の解像度と X 軸を一致させたい場合、このツールを使用して推奨トリガー間隔を取得することもできます。
1.3.1. トリガー方向
パラメータ説明 |
スキャンをトリガーするエンコーダーの動作方向を選択する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
エンコーダー動作方向と対象物がインラインプロファイル測定器に対する移動方向に基づいて調整してください
|
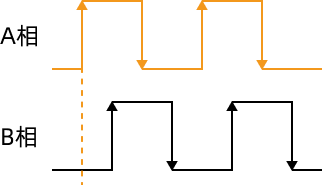

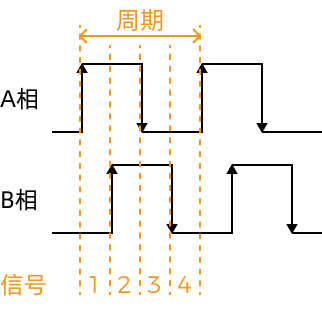
1.3.2. トリガー信号カウントモード
パラメータ説明 |
各エンコーダー信号周期にカウントする信号の数を設定する。カウントの信号はスキャンをトリガーするために使用する(トリガー信号として) 下図に示すように、エンコーダーの信号周期には、4つの信号がある
|
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
このパラメータはトリガー頻度と共同でスキャンをトリガーする頻度を決定する。
|
1.3.3. トリガー間隔
パラメータ説明 |
一回スキャンする時にトリガー信号の数を設定する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
トリガー信号カウントモードと共同でスキャンをトリガーする頻度を決定する。
|
1.4. 固定頻度:トリガー頻度
パラメータ説明 |
ラインスキャントリガーソースが固定頻度に設定されている場合、スキャンをトリガーする固定頻度を設定する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
|
1.5. トリガー遅延
パラメータ説明 |
インラインプロファイル測定器がトリガー信号を受信してからレーザー光を照射するまでの遅延時間を設定する |
|---|---|
可視性 |
グル |
オプション |
|
調整説明 |
インラインプロファイル測定器を一台だけ使用する場合はこのパラメータを使用しないでください。
|
1.5.1. トリガー遅延を調整する
以下のシーンにトリガー遅延パラメータを使用します。
-
複数台のインラインプロファイル測定器を使用します。
-
複数台の測定器は、同じトリガーソースによりトリガーされます。
-
測定器の視野は重なる部分があり、同時にレーザー光を照射すると互いに干渉します。
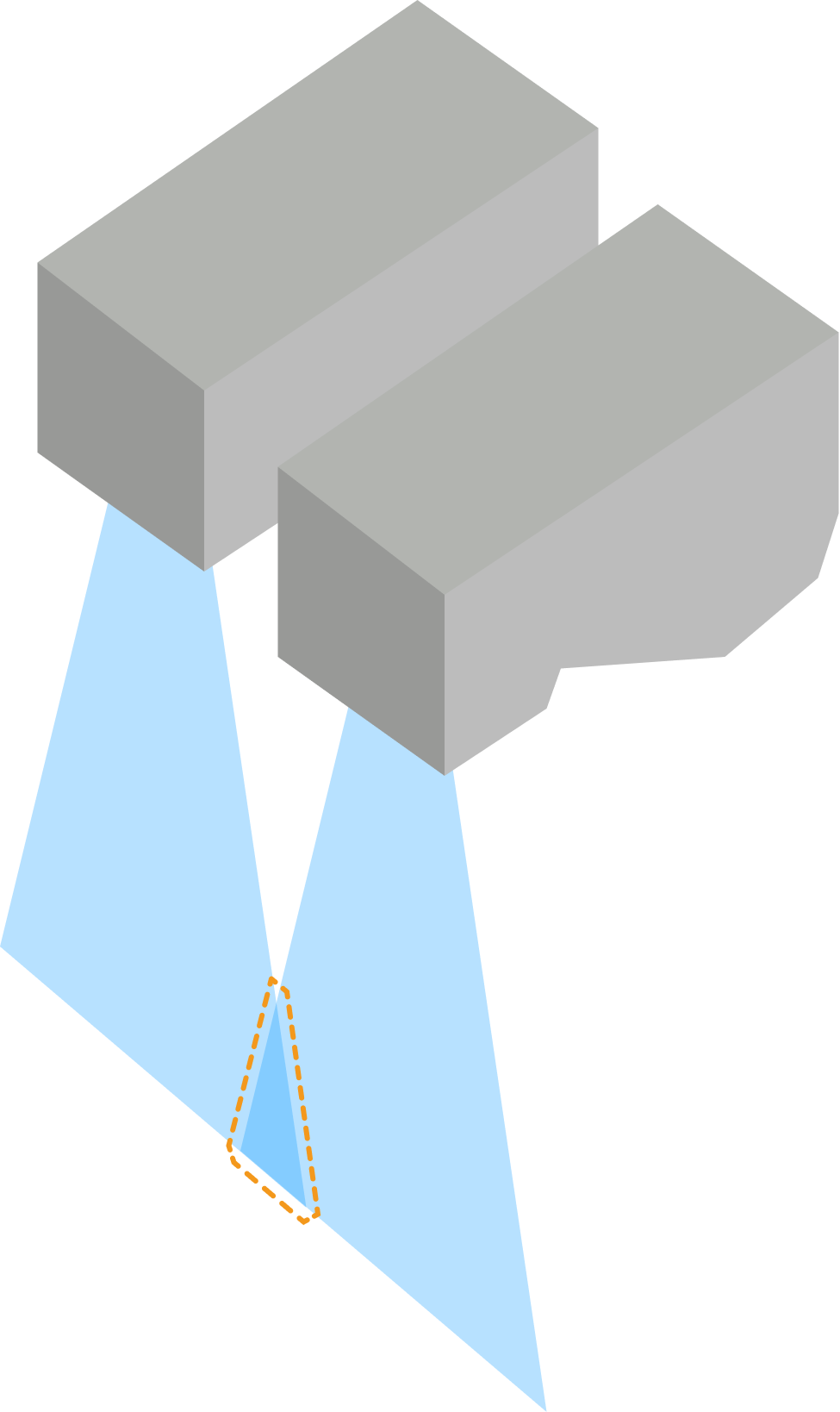
トリガー遅延を適切に設定すると、測定器はそれぞれ異なる時間にレーザー光を照射してデータを収集するので干渉は発生しません。
|
トリガー遅延を調整すると、以下のことにご注意下さい。
|
トリガー遅延の調整は、以下の手順を実行します。
-
プロファイルモードとスキャンモードを参考してインラインプロファイル測定器のパラメータを調整し、高品質のデータを取得できるようにします。
-
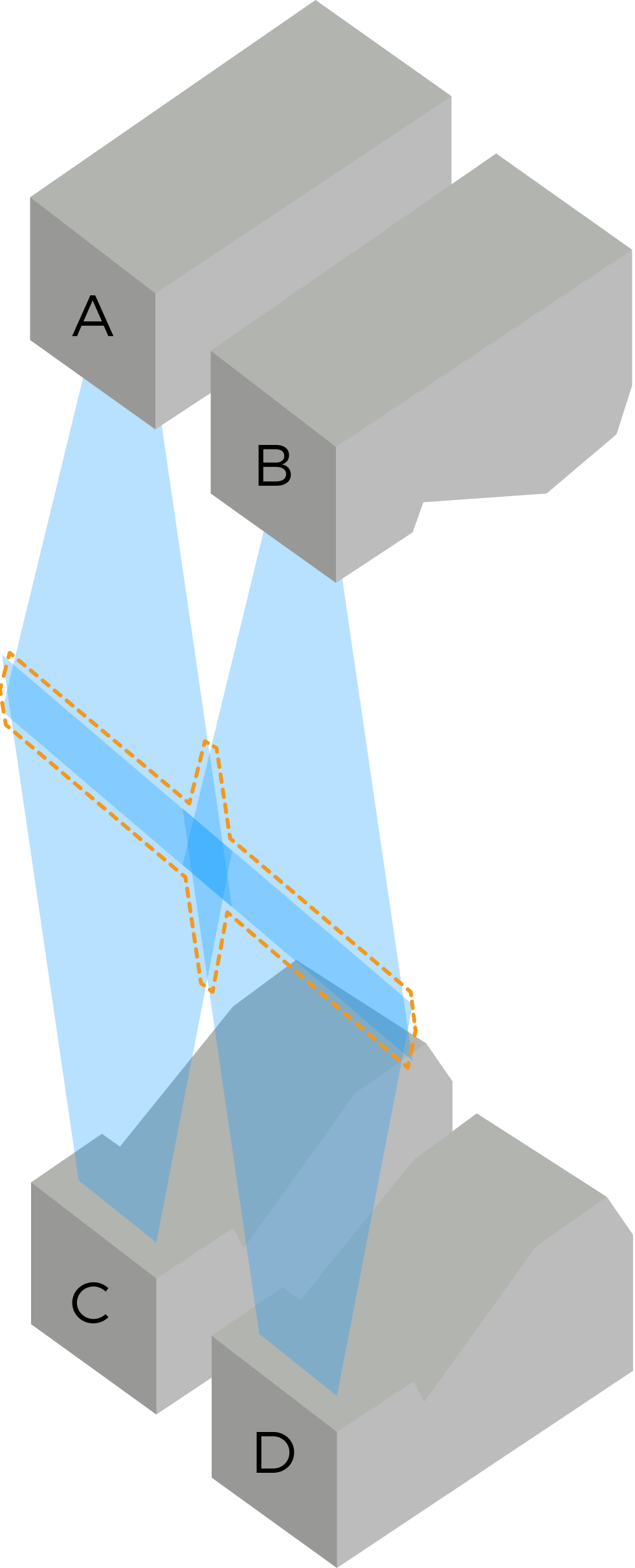
2 以上の測定器を使用する場合、視野の重なりを確認してください。
視野の重なりを確認
測定器はいずれも重なる
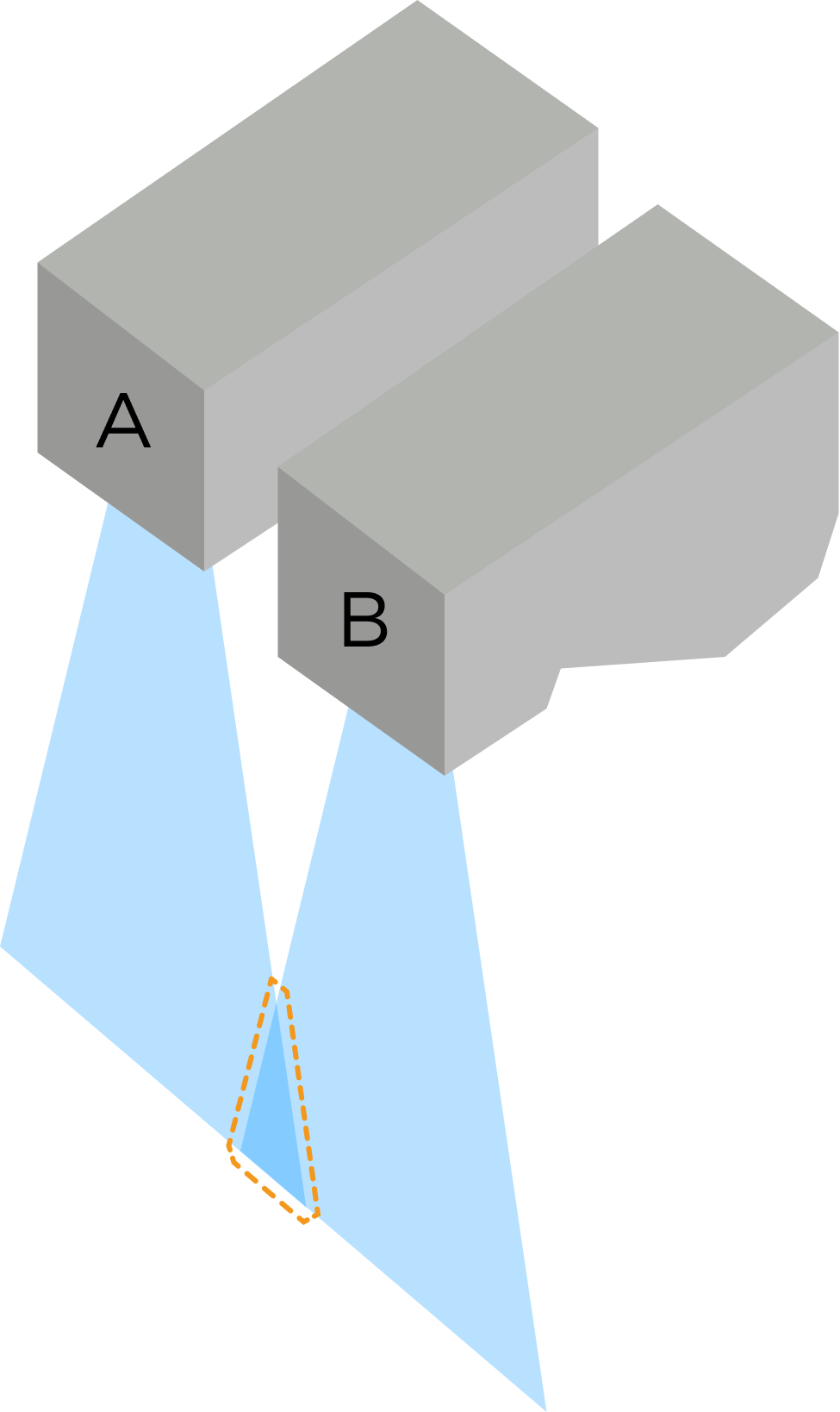
一部の測定器は重なる
相対位置の説明図
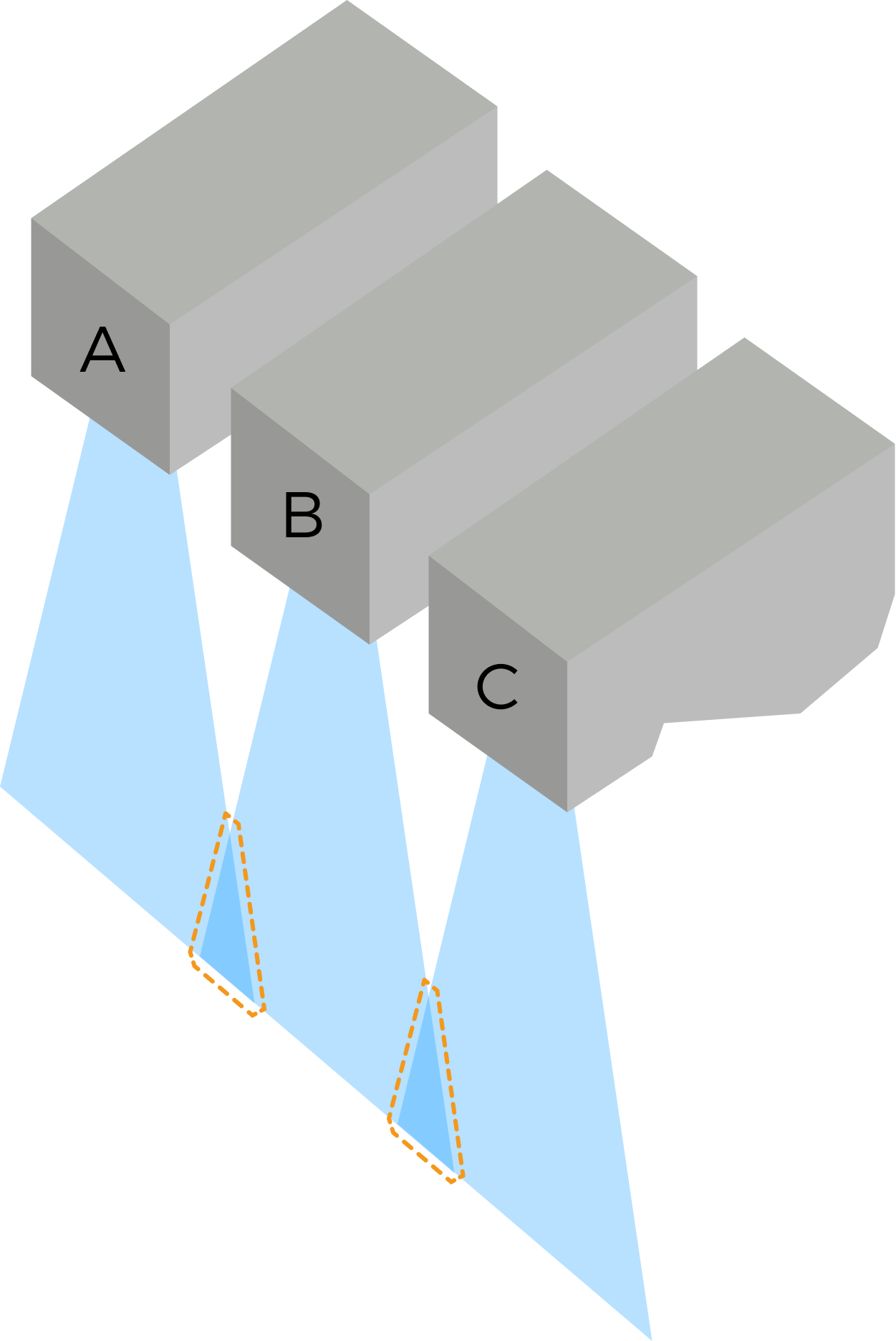
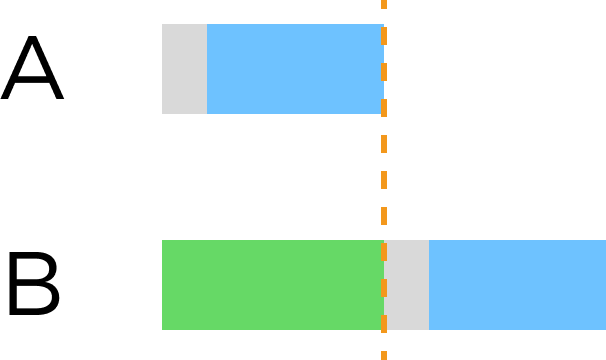
トリガー遅延パラメータを調整するには、視野が重なる測定器間に干渉が発生しないことが目的なので右図では、視野が重ならない A と B は同時にレーザー光を照射してもいいです。この時、B が A と C の後でレーザー光を照射するよう、そのトリガー遅延パラメータを調整すればいいです。
-
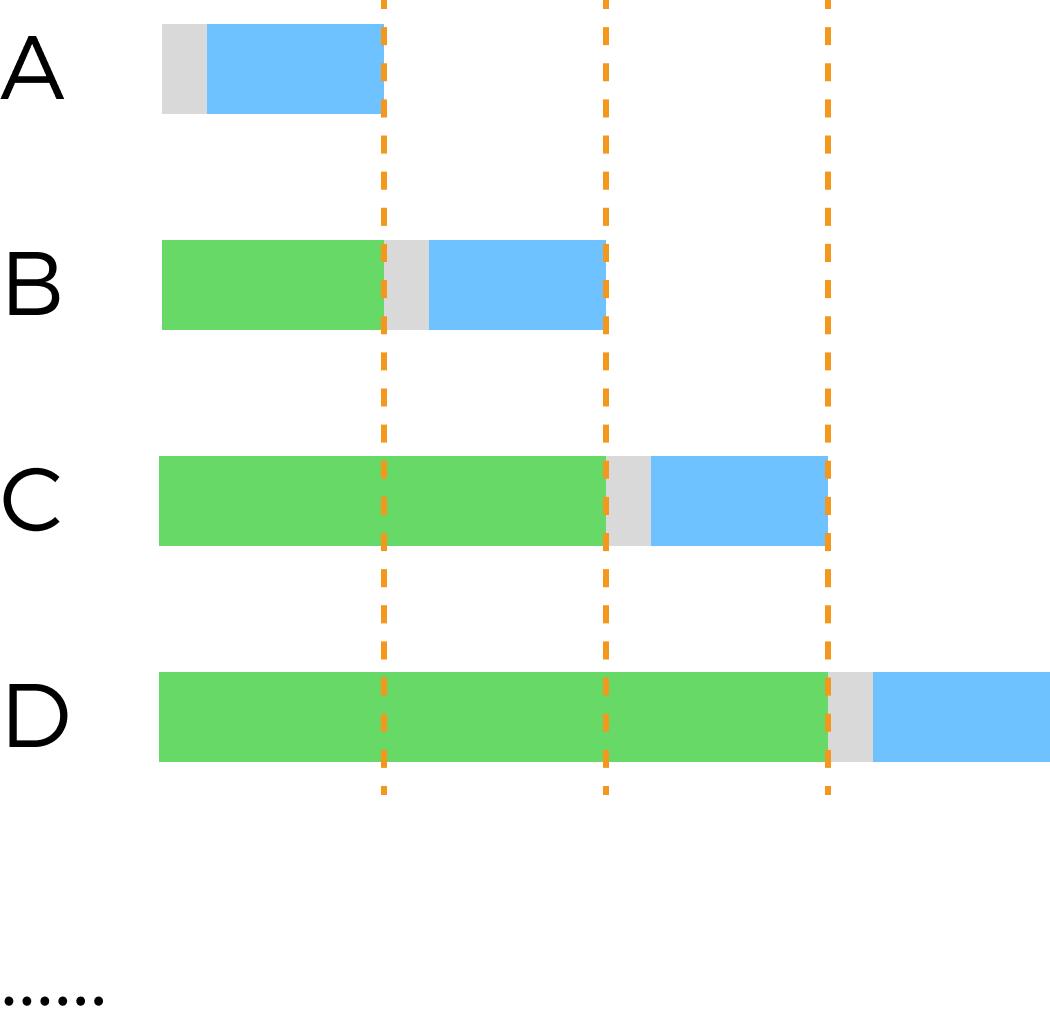
以下の表の相対位置のパラメータ調整の例を参考して、以下の手順で測定器のトリガー遅延パラメータを調整します。
-
最初に照射する測定器のトリガー遅延を「0」のままにします。
-
二番目に照射する測定器に対しては、以下の公式に基づいてトリガー遅延を調整します。
測定器がレーザー光を照射してから 10μs したら露出します。 -
三番目に照射する測定器に対しては、以下の公式に基づいてトリガー遅延を調整します。
-
このように、全ての測定器のトリガー遅延パラメータ設定を完了します。
相対位置の説明図
パラメータ設定

 :露出遅延時間(10μs)
:露出遅延時間(10μs) :露出時間/総露出時間
:露出時間/総露出時間 :トリガー遅延
:トリガー遅延
-
2. スキャン設定
ほかのスキャンに影響するパラメータを設定します。
2.1. プロファイル数
パラメータ説明 |
1 枚の強度画像/深度画像を生成するために使用するプロファイルの数を設定する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
|
調整説明 |
3. 解像度
スキャンデータの X 軸解像度と点群の Y 軸解像度を設定します。
3.1. X 方向解像度
パラメータ説明 |
スキャンデータの X 方向の解像度を設定する。これは、レーザーラインの方向に沿った隣接する 2 点間の距離 |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
設定可能範囲 |
|
||
調整説明 |
スキャンデータの X 軸解像度と Y 軸解像度を一致させたい場合、トリガー信号カウントモードなどのパラメータで Y 軸解像度を調整できなければ、X 軸解像度を調整してください |
3.2. 点群の Y 方向解像度
パラメータ説明 |
点群の Y 方向の解像度を設定する。これは、対象物移動方向に沿った隣接する 2 点間の距離 |
|---|---|
可視性 |
初級、専門、グル |
設定範囲 |
|
調整説明 |
このパラメータは点群の Y 方向解像度にだけ影響する。2 点が Y 軸に沿う距離が実際より短い場合にパラメータ値を高くしてください。長い場合に低くしてください |
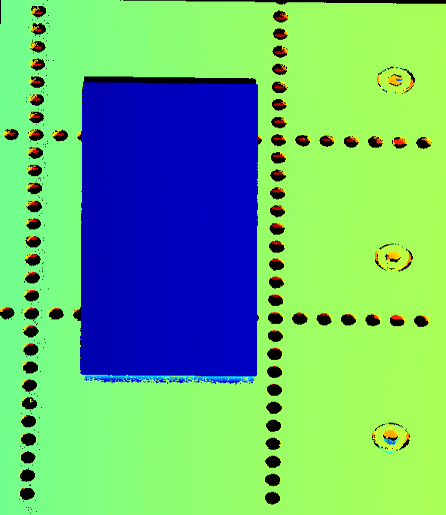
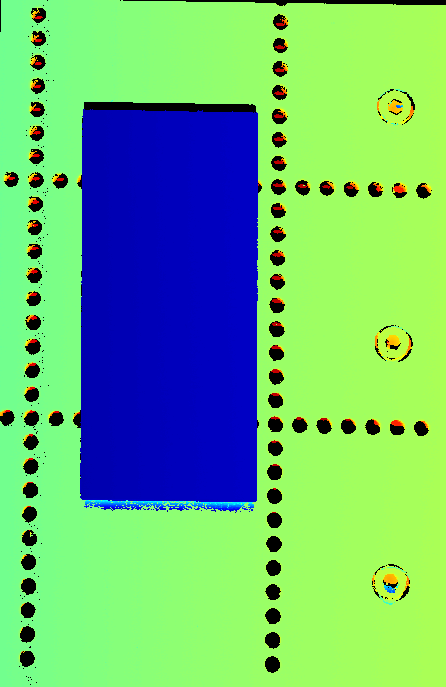
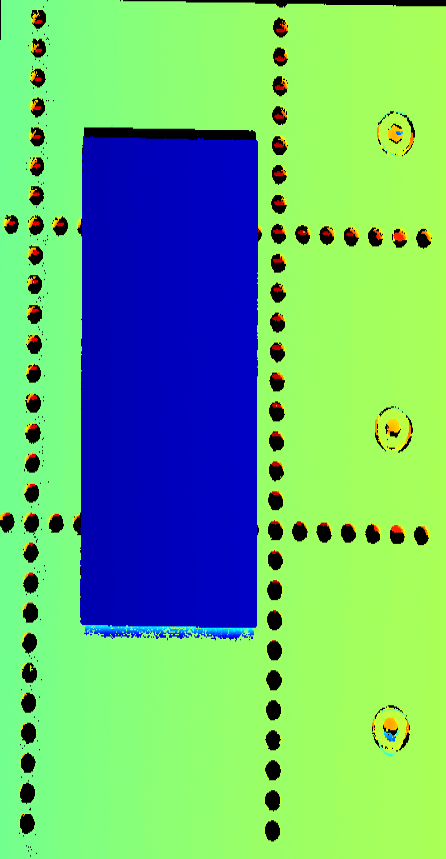
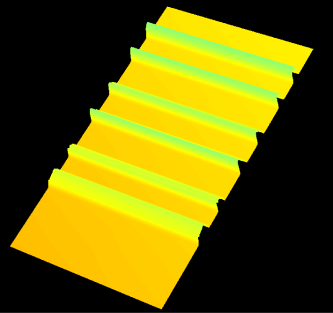
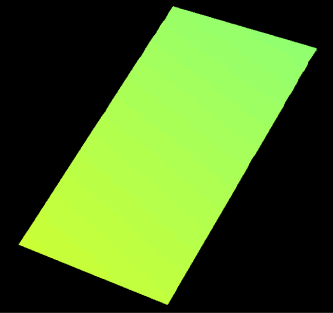
他のパラメータを同じ値に設定した場合、Y 方向解像度設定値によって取得した点群は以下のように異なります。
| Y 方向解像度:12μm | Y 方向解像度:23.5μm | Y 方向解像度:35μm |
|---|---|---|
|
|
|
4. マスク
パラメータ説明 |
マスクを使用して不要なデータ(ノイズ、多重反射によって生成されるレーザーライン)を排除する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
マスクを使用:
|
調整説明 |
編集をクリックしてマスクツールウィンドウを開く。詳しい調整手順は以下のマスクツールをお読みください |
4.1. マスクツール
マスクを追加、編集、削除します。
4.1.1. マスクを追加する
以下の手順を実行します:
-
左側のツールバーに使用するツールを選択します。
-
 :長方形マスクを作成する。
:長方形マスクを作成する。 -
 :ポリゴンマスクを作成する。
:ポリゴンマスクを作成する。
-
-
元画像で遮蔽する部分を確認してからマスクを作成します:
-
必要なマスクを全部追加したら、適用をクリックしてウィンドウを閉じます。
注記: 適用ボタンをクリックするとマスクを使用機能は自動的にオンになります。マスクを使用しない場合は、オフにしてください。

4.1.2. マスクを編集
マスクの位置や形状、サイズを調整したい場合、以下のようにマスクを編集してください:
-
左側のツールバーの
 をクリックします。
をクリックします。 -
編集したいマスクを選択して調整します。
-
マスクの位置を移動:マスクを選択してからドラッグする。
-
長方形マスクのサイズを調整:マスクの頂点をドラッグする。
-
ポリゴンマスクの形状を変更:
-
頂点を移動:頂点をドラッグする。
-
頂点を追加:辺をクリックする。
-
頂点を削除:頂点を右クリックする。
再度取得をクリックしてマスクを編集した元画像を再度収集して遮蔽の効果を確認します。
-
-
-
編集を完了したら、適用をクリックしてウィンドウを閉じます。
注記: 適用ボタンをクリックするとマスクを使用機能は自動的にオンになります。マスクを使用しない場合は、オフにしてください。
5. プロファイルアライメント
プロファイルの X、Z 方向のズレを補正します。
5.1. X 方向アライメント
パラメータ説明 |
プロファイルの X 方向のズレを補正する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
X 方向のアライメントを有効にする
|
調整説明 |
データを取得してから編集ボタンをクリックしてツールを開く。詳細は X 方向アライメントからご参照ください |
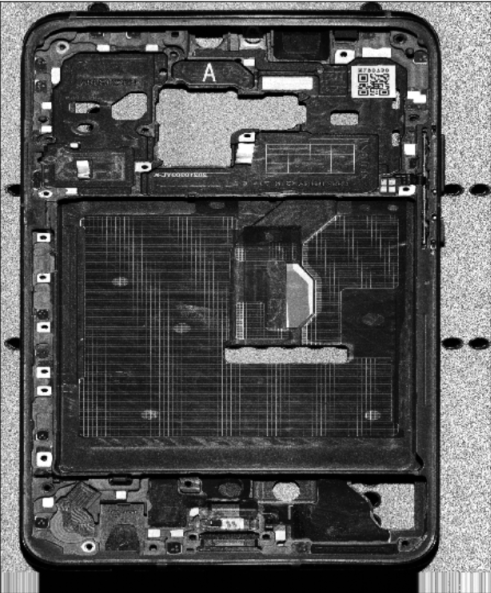
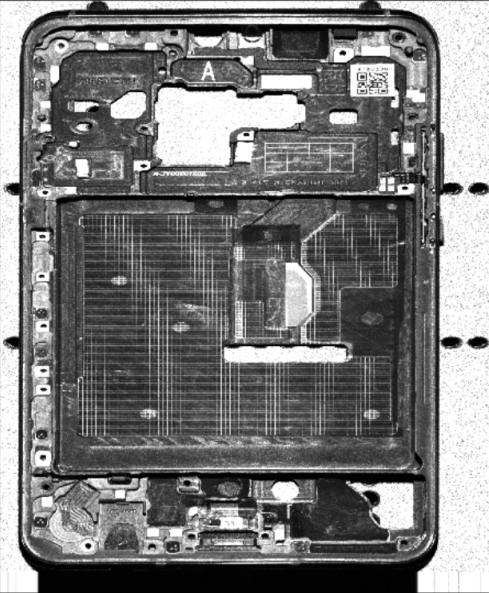
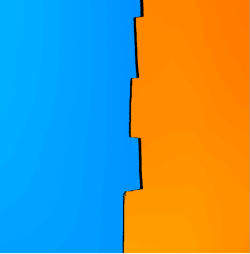
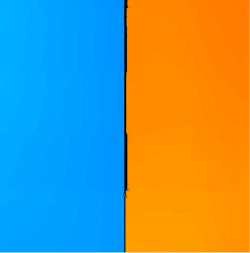
他のパラメータを同じ値に設定した場合、X 方向アライメント使用・不使用の深度画像は以下のように異なります。
| 対象物 | 不使用 | 使用 |
|---|---|---|
|
|
|
5.2. Z 方向アライメント
パラメータ説明 |
プロファイルの Z 方向のズレを補正する |
|---|---|
可視性 |
初級、専門、グル |
設定範囲 |
Z 方向のアライメントを有効にする
|
調整説明 |
データを取得してから編集ボタンをクリックしてツールを開く。詳細は Z 方向アライメントからご参照ください |
他のパラメータを同じ値に設定した場合、Z 方向アライメント使用・不使用の場合に取得した点群は以下のように異なります。
| 対象物 | 不使用 | 使用 |
|---|---|---|
|
|
|
6. 補正
このクラスのパラメータはプロファイルの傾きと高さの誤差を補正します。
6.1. 傾き補正
パラメータ説明 |
プロファイルの傾きを補正する。この傾きは、Y 軸を中心としたインラインプロファイル測定器の回転によって引き起こされる |
|---|---|
可視性 |
初級、専門、グル |
オプション |
傾き補正を使用:
傾き補正角度:
|
調整説明 |
詳細は傾き補正からご参照ください |
6.2. 高さ補正
パラメータ説明 |
プロファイルの高さの誤差を補正する。X 軸を中心としたインラインプロファイル測定器の回転によって引き起こされる |
|---|---|
可視性 |
初級、専門、グル |
オプション |
高さ補正を使用:
高さ補正率:
|
調整説明 |
詳細は高さ補正からご参照ください |
7. フィルター
深度画像と点群に対して死角フィルタリングとノイズ除去を実行します。
7.1. 死角フィルター
対象物表面から反射されるレーザー光は遮られ、死角が出てきます。
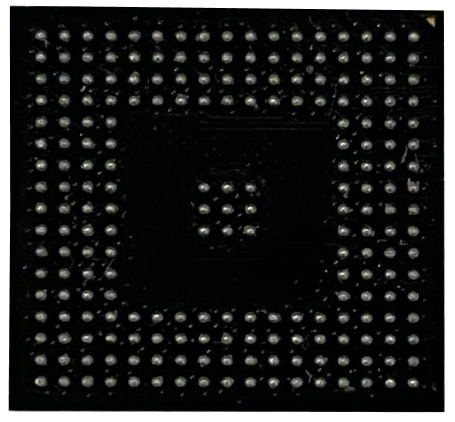
プリント基板(PCB)など、表面に密集した凸凹がある対象物を処理する場合には、多重反射が発生する可能性があります。多重反射により、死角付近に間違ったデータが発生する恐れがあります。死角フィルター機能を使用することで間違ったデータを除去することができます。
パラメータ説明 |
後続の処理に影響が出ないように死角によって生じた間違ったデータを除去する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
死角フィルターを有効にするボタン
|
調整説明 |
データを取得してから編集ボタンをクリックしてツールを開く詳細死角フィルターからご参照ください |
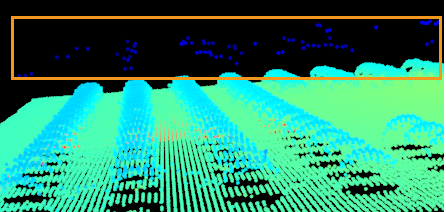
他のパラメータを同じ値に設定した場合、死角フィルターツール使用・不使用の場合に取得した点群は以下のように異なります。
| 対象物 | 不使用 | 使用 |
|---|---|---|
|
|
|
7.2. ノイズ除去
パラメータ説明 |
深度画像と点群のノイズを除去する。ノイズとは、表面付近の外れ値のこと |
|---|---|
可視性 |
初級、専門、グル |
オプション |
ノイズ除去を有効にする
ノイズ除去強度
|
調整説明 |
|
他のパラメータを同じ値に設定した場合、ノイズ除去使用・不使用の場合に取得した点群は以下のように異なります。
| 対象物 | 不使用 | 使用 |
|---|---|---|
|
|
|