2. 工具和工件配置¶
用户在本章中可完成工具和工件配置。
配置末端工具目的是在三维仿真空间中能够显示末端工具的模型,并使末端工具能够参与碰撞检测。
配置工件用于抓取工件时的机器人运动轨迹规划。
本章主要包含以下内容:
2.1. 添加并调整碰撞模型¶
2.1.1. 添加模型¶
提示
Mech-Viz 中 .STL 模型以“米”为单位。用户在使用其他软件制作 .STL 模型时,需以“米”为单位导出。
此示例中的模型位于 Mech-Viz 示例工程的 sampleviz\end_effectors\collision_models 文件下。
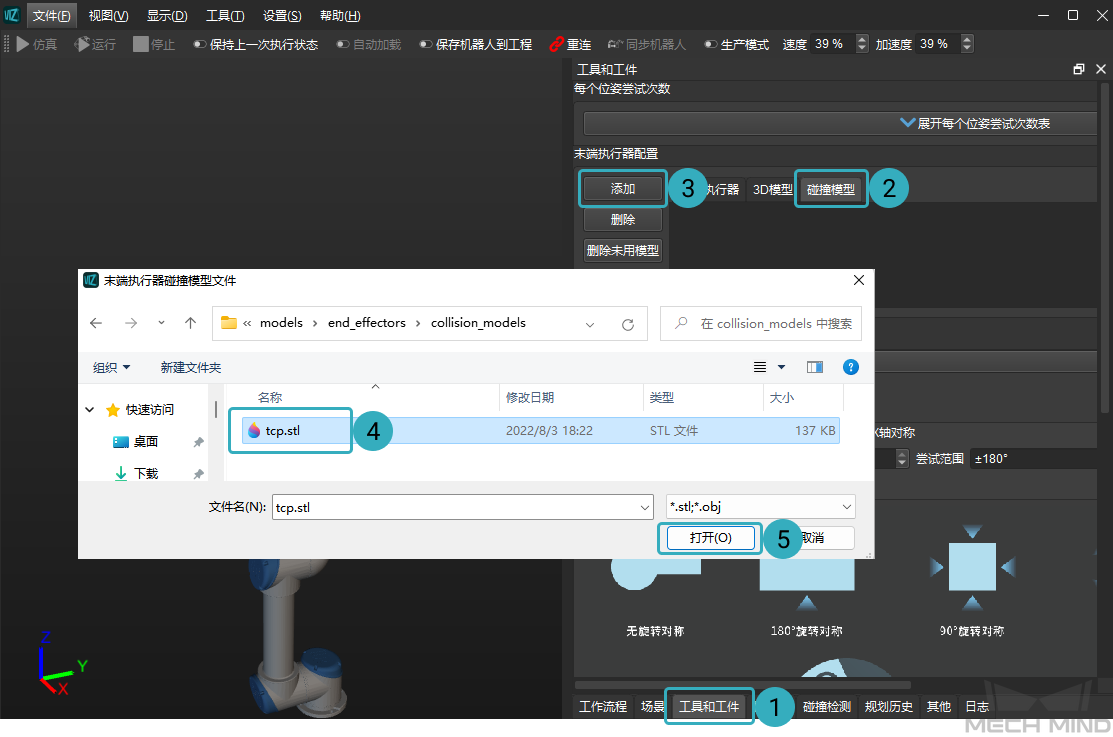
操作流程:
单击 工具和工件 。
单击 碰撞模型 。
单击 添加 。
选中用户准备的模型。
单击 打开 。
按步骤操作完成后,模型名称将显示在碰撞模型列表中。
此时三维仿真空间中未显示该模型,单击模型名称后即可显示。
2.1.2. 调整模型¶
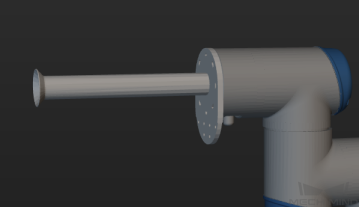
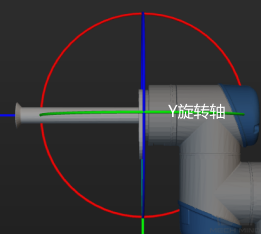
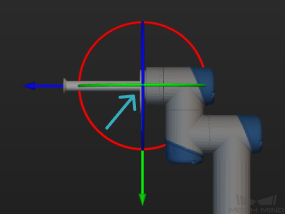
三维仿真空间中模型的位置应与实际末端工具安装在机器人上的位置一致。
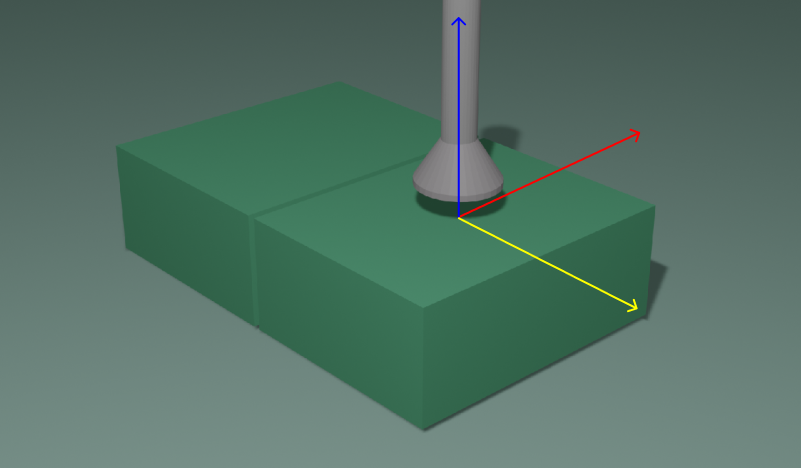
此示例中,末端工具模型正确位置如下图所示。
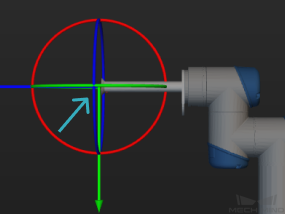
在实际操作过程中,导入的末端工具模型位置会出现错误,此时需要用户进行调整。
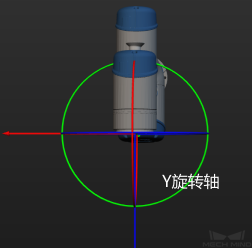
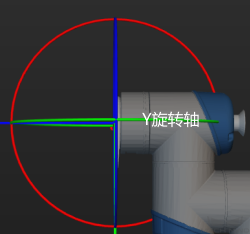
以下图所示错误位置为例。

通过以下操作,用户可调整模型到正确的位置。
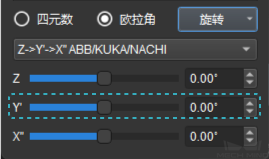
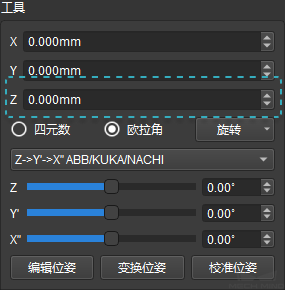
双击碰撞模型名称,打开 编辑模型变换 窗口。
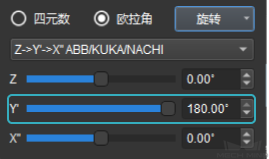
调整 Y` 参数,使模型旋转 180° 回到正确位置。
修改前参数
修改后参数
参数修改
错误位置
正确位置
俯视图
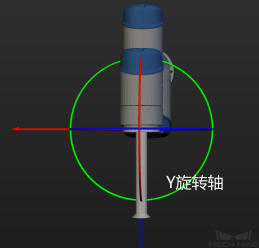
侧视图
提示
在 编辑模型变换 弹窗中,可调节模型的比例及位置。用户可依据实际遇到的情况来调节各项参数。
2.2. 添加末端工具¶
操作说明 |
图示 |
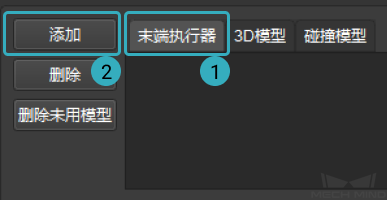
①-② 单击 末端工具 后单击 添加 。 |
|
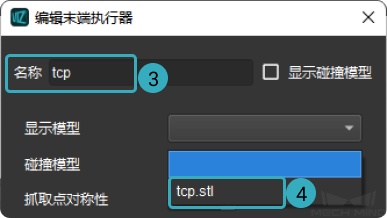
③-④ 自定义末端工具名称(此例中命名为 tcp),选择添加的碰撞模型。 |
|
⑤ 单击 OK 保存设置。 |
|
设置完成后,末端执行器列表中将显示添加后的模型名称。 |

|
2.3. 调整末端工具中心点¶
工具中心点由拖拽器(机器人模型末端的坐标球)中心点表示,在工程中工具中心点应位于末端工具的末端。
双击末端工具的名称,进入 编辑末端工具 窗口,通过修改对应参数,来调整工具中心点位置。此示例中只需将工具中心点沿 Z 轴正向移动一段距离即可。
修改前 |
修改后 |
|
参数修改 |
|

|
图示 |
|
|
修改完成后,单击 OK 完成设置。
2.4. 工件配置¶
完成以上末端工具相关设置后,接下来完成工件相关的配置。
旋转对称:通常纸箱可以视为一个顶面 180° 对称的长方体,绕 Z 轴成 180° 旋转对称,所以选择 无X/Y对称 、 Z轴步长180° 、 尝试范围±180° 。
抓取裕度:通常纸箱抓取场景中纸箱顶部与吸盘表面平行,需严格按照抓取点进行抓取,因此不需要设置。
最优抓取选解策略:对于纸箱抓取,可选择默认或全局转动最小,可以避免机器人在抓取箱子后无意义地转动,避免箱子掉落。
工具和工件配置完成后,请继续查看下一章完成场景配置。