3. 场景配置¶
添加场景模型用于还原真实现场场景,以此来辅助用户规划机器人运动路径。
本章主要包含以下内容:
3.1. 添加场景模型¶
软件中可以 新建 或 加载 场景模型,此例中使用 加载模型 的方式,如下图所示。
示例中的场景模型位于示例工程的 sampleviz_zh\models 文件下。
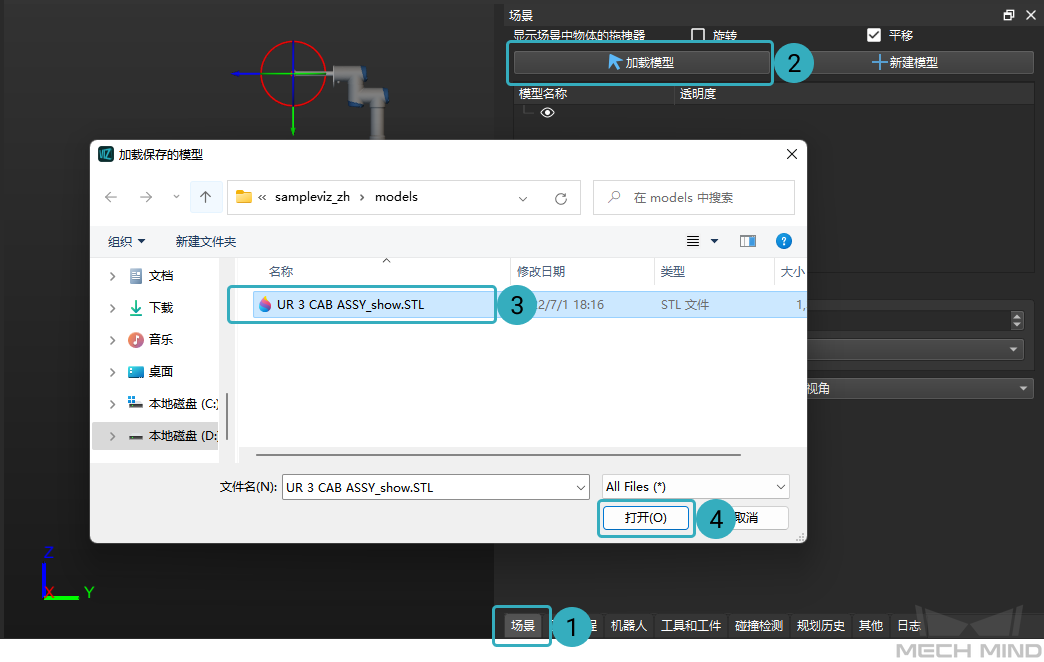
操作流程:
单击 场景 。
单击 加载模型 。
选中用户准备的模型。
单击 打开 。
按步骤操作完成后,模型名称将显示在场景模型列表中,并且在三维仿真空间中场景模型将高亮显示。
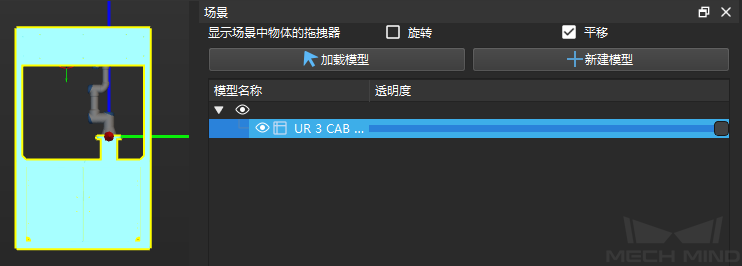
提示
添加后的模型若位置错误,用户可单击场景中的物体模型,勾选 旋转 或 平移 后会显示物体的拖拽器。按住 ctrl 键,同时使用鼠标左键选中拖拽器的某个平移轴或旋转轴进行拖拽,来调整模型位姿。