로봇 모델 생성 및 도입하기¶
로봇 모델을 새로 만들고 도입하는 기본 단계는 다음과 같습니다.
이 부분에서는 FANUC M-900iB/400L을 예로 들어 Mech-Viz V1.6.0에서 새로운 로봇 모델의 제작 및 도입하기 단계를 자세히 소개할 것입니다.
로봇 CAD 파일 및 사용 설명서 준비¶
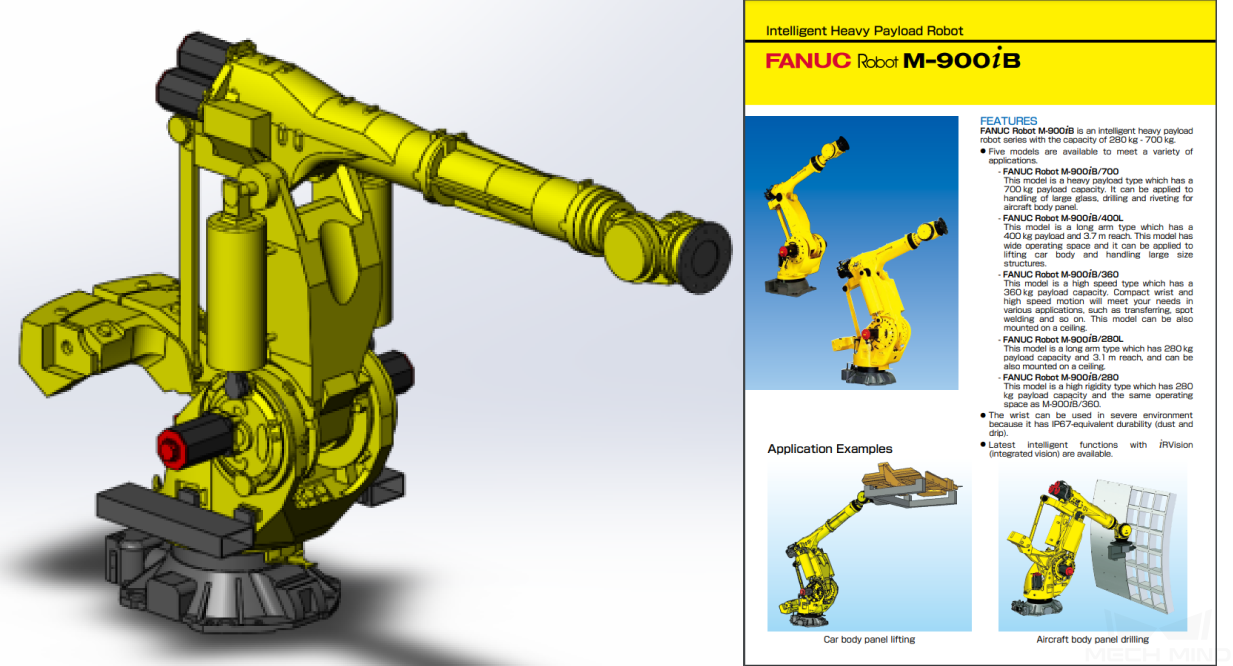
로봇 모델을 만들기 전에 로봇의 CAD 모델과 로봇의 DH 파라미터와 각 관절의 한계를 표시하는 설명서 파일을 준비해야 합니다. 사용자는 특정 로봇의 공식 웹사이트를 조회하고 해당 모델 로봇의 관련 파일을 다운로드할 수 있습니다. 아래 그림은 FANUC M-900iB/400L CAD 모델 및 사용설명서 입니다 .
힌트
일부 로봇 웹사이트에서는 x_t 형식의 모델을 제공하는데 STEP 형식에 비해 x_t 형식의 모델은 재구성 시 성공률이 높고 속도가 빠르므로 x_t 형식의 모델을 먼저 사용하는 것이 좋습니다.
[robot]_algo.json 파라미터 파일 작성¶
[robot]_algo.json 파일 템플릿¶
[robot]_algo.json의 템플릿 파일은 Mech-Viz 설치 경로의 resource/robot/algo_example.json 에 저장되어 있으며, 사용자는 이를 기반으로 새로운 로봇의 [robot]_algo.json 파일을 생성할 수 있습니다.
힌트
[robot]_algo.json 파일의 각 파라미터의 의미는 [robot]_algo.json 파일 속성 정의 를 참조하십시오.
로봇 구성 확인(algo_type)¶
로봇은 다양한 구성으로 나뉩니다. Mech-Viz에 따라 로봇 구성마다 좌표계와 DH 파라미터 정의가 다릅니다. 로봇 구성 구분에 대한 자세한 내용은 로봇 구성 을 참조하십시오.
FANUC M-900iB/400L 로봇은 UR과 같은 협동 로봇이 아니라 SphericalWrist_SixAxis 구성에 속하는 기존의 6축 구형 손목 산업용 로봇입니다.
DH 파라미터 확인(dh, dhPassive)¶
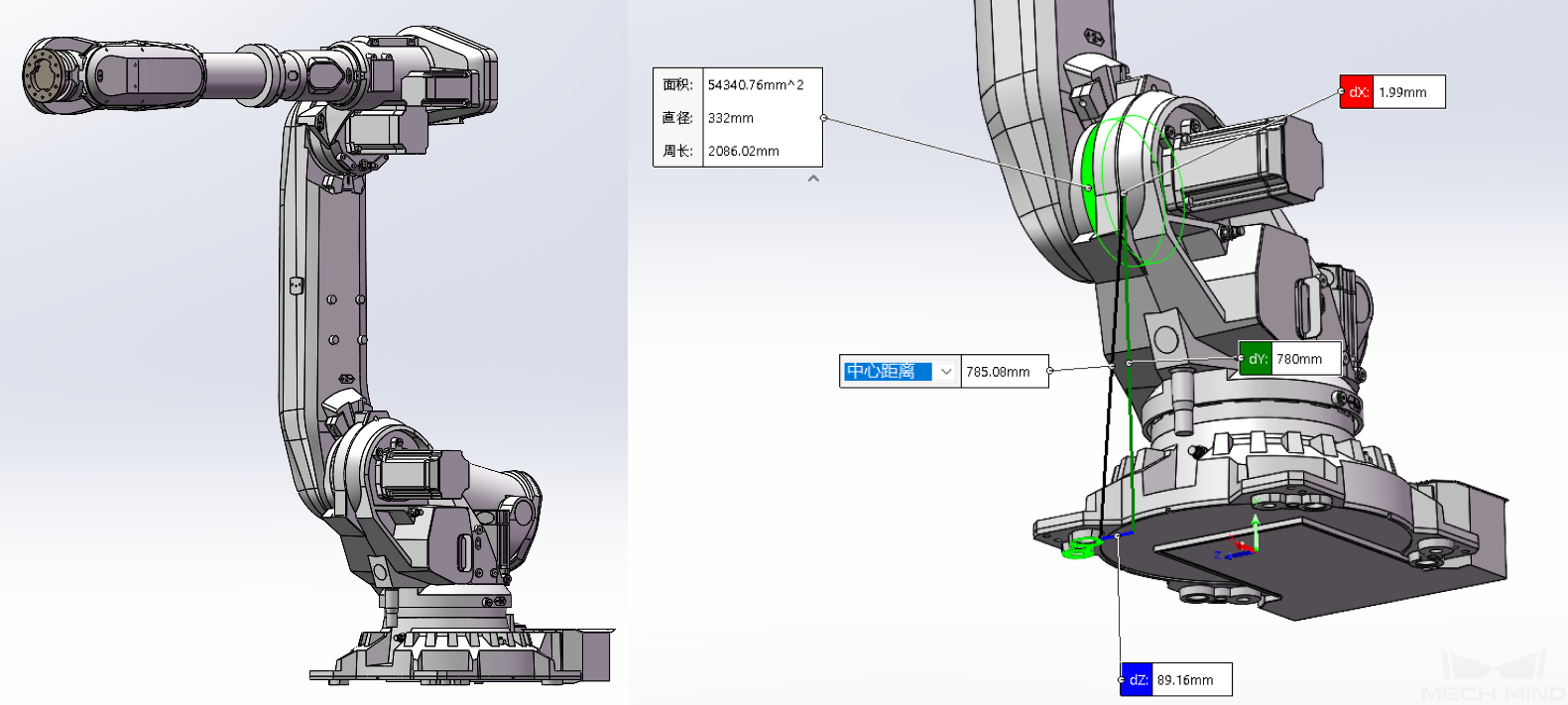
로봇 구성 페이지에서 로봇 분류를 참조하고 해당 로봇 구성도를 찾아 로봇 사용 설명서에 따라 [robot]_algo.json 에서 dh 값을 확인합니다.
확인 후 FANUC M-900iB/400L의 dh 파라미터는 각각 a=0.940, b=0.410, c=1.120, d=0.250, e=2.180, f=0.300입니다.
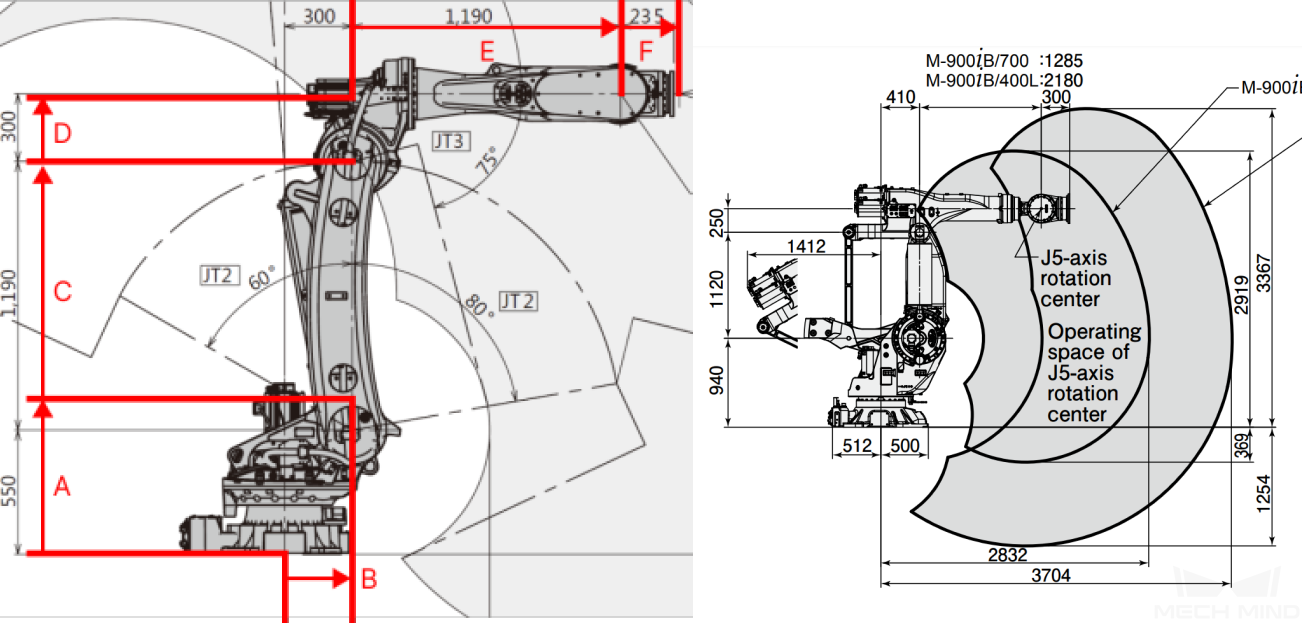
위 그림에서 왼쪽은 SphericalWrist_SixAxis 로봇 구성도이고 오른쪽은 FANUC M-900iB/400L 로봇 사이즈 그림입니다.
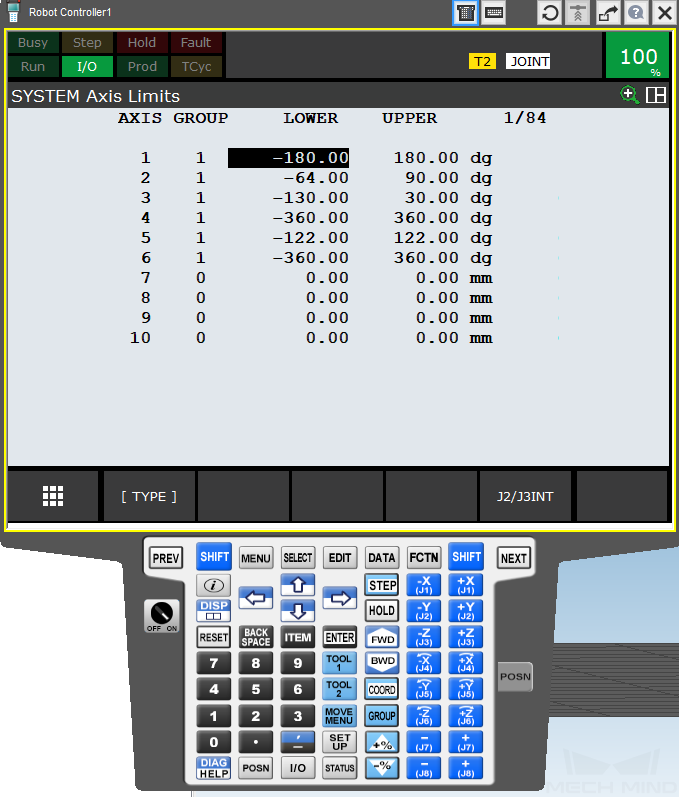
로봇 축 제한(minlimits, maxlimits) 확인¶
일반적으로 로봇의 각 축의 동작 범위는 로봇 사용 설명서에서 알 수 있지만 FANUC 로봇은 특수하므로 해당 내용을 찾으려면 FANUC 로봇 시뮬레이션 소프트웨어 RoboGuide를 열어야 합니다.
다른 파라미터의 확인¶
일반적인 로봇 브랜드의 경우 추가된 다른 로봇의 과거 데이터를 참조할 수 있습니다. 참조 데이터가 없는 경우 현장 엔지니어는 실제 로봇에 대해 나머지 파라미터를 확인해야 합니다.
주의
json 파라미터 파일의 문장부호는 반드시 영어여야 합니다(예를 들면 쉼표).
mastering_joints、axis_flip、base_z_offset 속성은 로봇을 만든 후 로봇 시뮬레이션 소프트웨어 와 대조하여 올바른지 확인해야 합니다.
axis_flip 속성은 minlimits 및 maxlimits와 결합되며, 필요한 경우 관절의 상한 및 하한 부호를 반대로 하고 위치를 반대로 해야 합니다.
mastering_joints 속성의 마지막 비트 J6은 종종 무시됩니다. 이 속성은 오일러 각 에 영향을 미치며 정확한지 확인해야 합니다.
[robot]_profile.json 파라미터 파일 작성¶
[robot]_profile.json 파일 템플릿은 Mech-Viz 설치 경로의 resource/robot/profile_example.json 에 저장되며 사용자는 이를 기반으로 새로운 로봇의 [robot]_profile.json 파일을 생성할 수 있습니다.
힌트
[robot]_profile.json 파일에서 각 파라미터의 의미는 [robot]_profile.json 파일 속성 정의 를 참조하십시오.
이 파일은 꼭 필요한 것이 아닙니다.
Solidworks를 사용하여 완전한 로봇 STL 모델 구축¶
모든 DH 파라미터를 얻은 후 사용자는 로봇 모델에서 각 축의 좌표계 설정을 시작할 수 있습니다.
SolidWorks 모델 도입하기¶
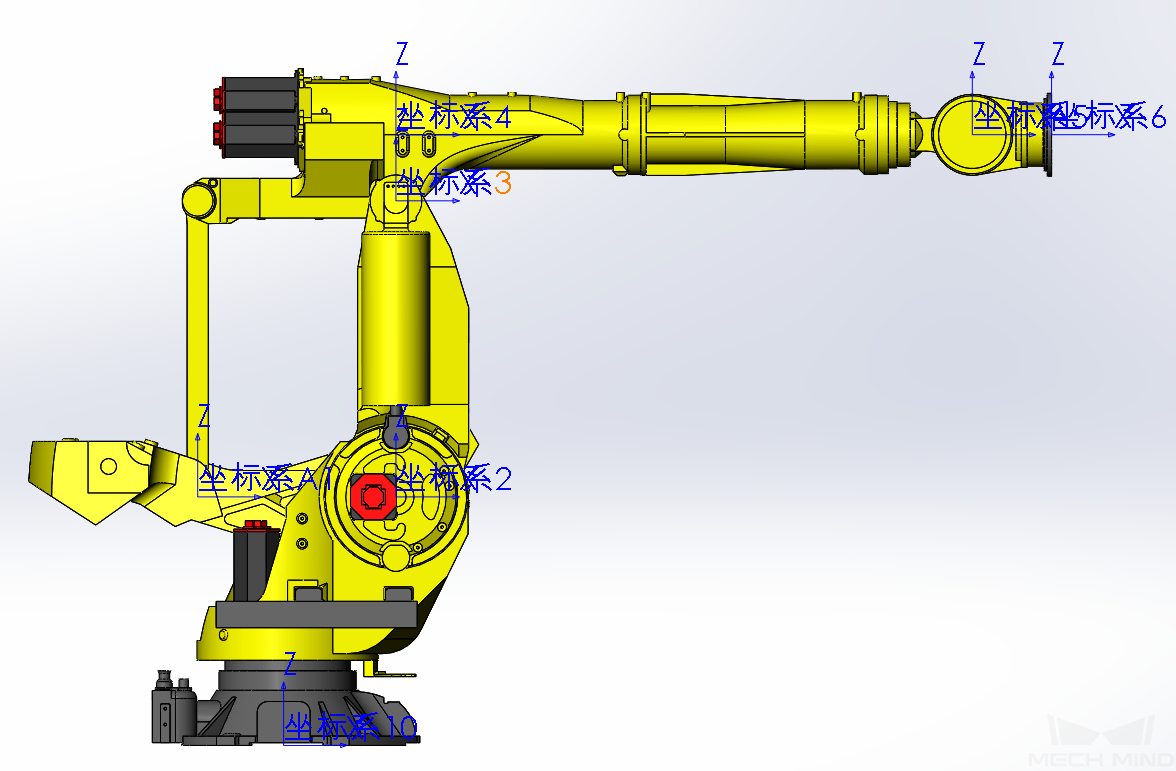
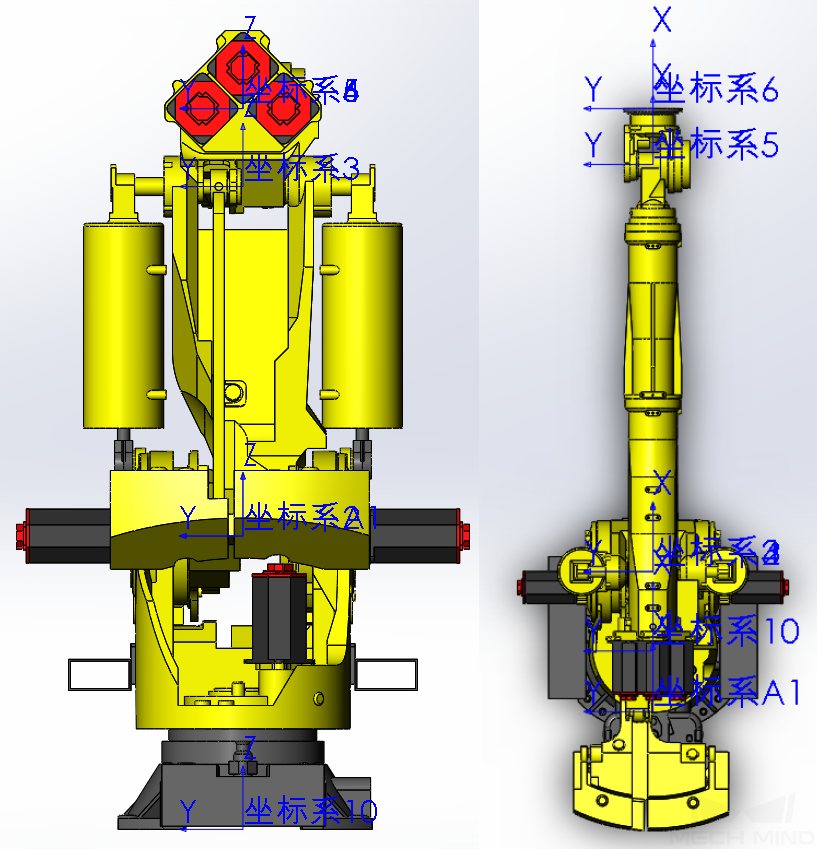
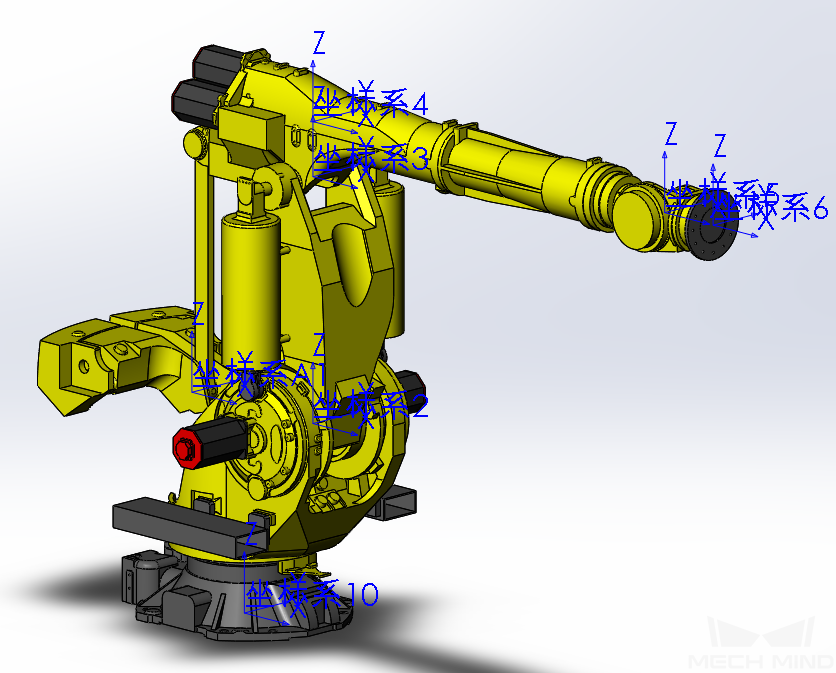
SolidWorks를 사용하여 미리 준비된 로봇 CAD 모델을 엽니다. 아래 이미지와 같습니다.
위 이미지에서 왼쪽은 3D 소프트웨어로 로봇 모델을 표시한 것이고 오른쪽은 조립 참조도입니다.
힌트
로봇 모델 다운로드 시 최대한 미리 조립된 전체 모델을 공식 홈페이지에서 다운로드 받으십시오.
부품으로만 다운로드가 가능한 경우 직접 조립하고 dh 파라미터를 참조하여 관절을 하나씩 확인해야 합니다.
모델 로딩 속도를 향상시키기 위해 모델 세부 정보를 적절하게 삭제하고 충돌 감지에 영향을 줄 수 있는 모델 구조만 보류합니다.
모델 파일을 Mech-Viz 소프트웨어에 넣기¶
Mech-Viz 소프트웨어가 로봇 라이브러리를 저장하는 경로는 설치 경로 아래의 resource/robot 폴더입니다. 동일한 브랜드의 로봇은 로봇 브랜드 이름을 딴 동일한 폴더에 저장됩니다. 각 로봇의 모든 파일은 브랜드 폴더 아래 로봇 모델의 이름을 딴 폴더에 위치합니다.
FANUC M900iB/400L 로봇을 예로 들어 해당 모델 폴더는 resource/robot/fanuc_m900ib_400l 이며 폴더 구조는 아래 그림과 같습니다.
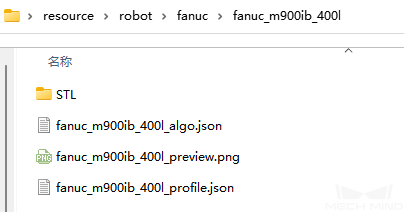
위 그림의 파일은 다음 설명에 해당합니다.
STL은 모델 파일입니다.fanuc_m900ib_400l_algo.json은 로봇 운동학 파라미터 파일입니다.fanuc_m900ib_400l_preview.png는 로봇 이미지입니다.fanuc_m900ib_400l_profile.json은 로봇의 파라미터 설명 파일입니다.
주의
로봇 폴더 이름은 모두 소문자여야 합니다.
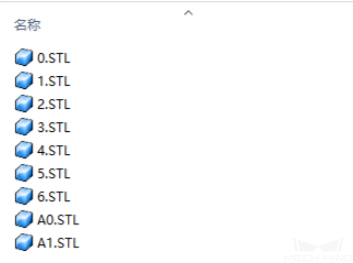
로봇 모델 파일은 STL, DAE, OBJ일 수 있으며 자체 폴더에 배치됩니다.
STL 모델은 디스플레이 및 충돌 모델로 사용할 수 있습니다.
DAE 모델은 디스플레이 모델로만 사용할 수 있습니다.
OBJ 모델은 충돌 모델로만 사용할 수 있습니다.
완전한 로봇 모델의 경우 표시할 수 있는 모델과 충돌할 수 있는 모델이 하나 이상 있어야 합니다.
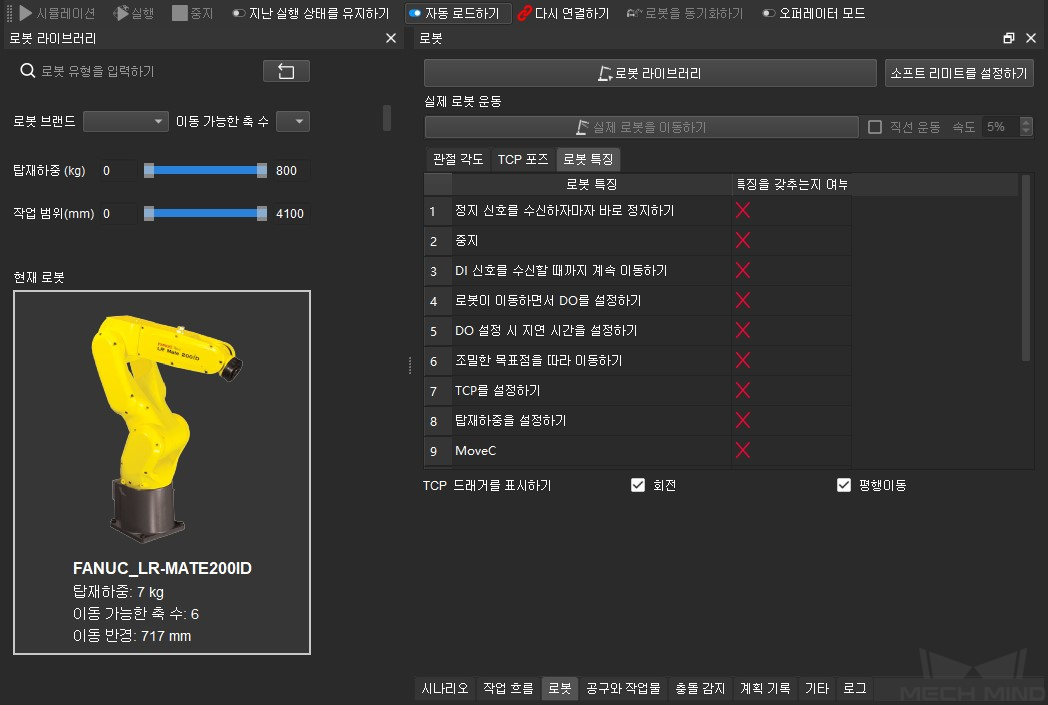
모든 파일을 해당 경로에 넣어 로봇 모델 도입하기를 완료합니다. 새로 도입한 로봇은 Mech-Viz 소프트웨어 로봇 라이브러리에서 선택할 수 있습니다.