로봇 구성¶
축의 수 |
6축 |
6축 |
|||
구성 |
구성 명칭 |
UR_UR5_Like |
SphericalWrist_SixAxis |
||
구성 설명 |
6축 협동로봇 |
일반 산업용 6축 구형 손목 로봇 |
|||
로봇 구성도 |
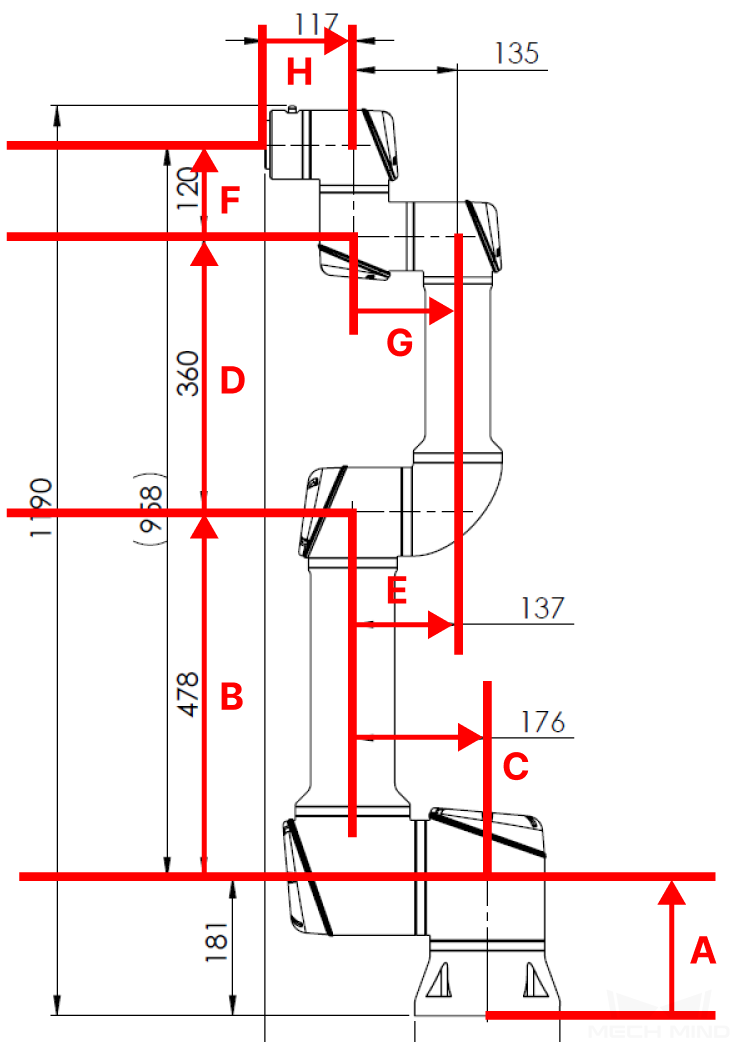
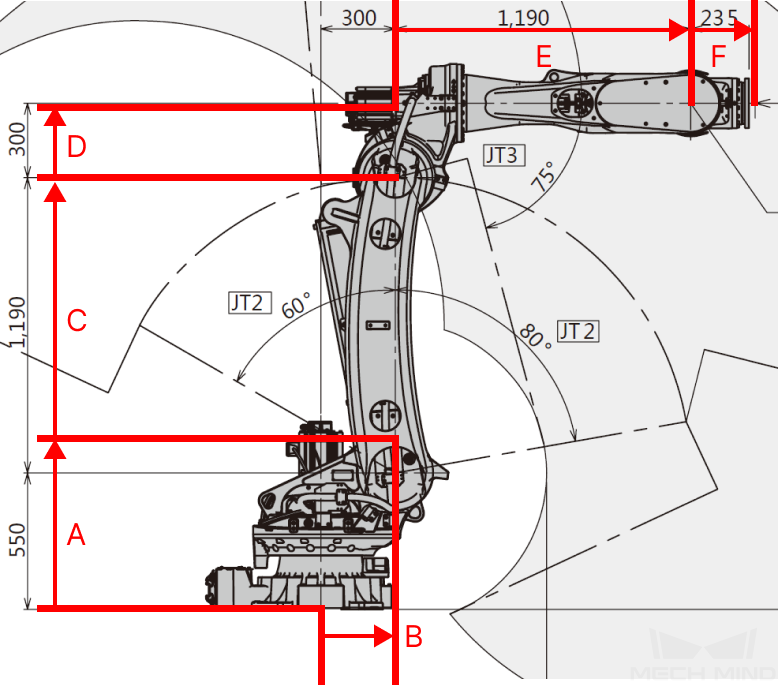
DH 파라미터 이미지 |
|
|
||
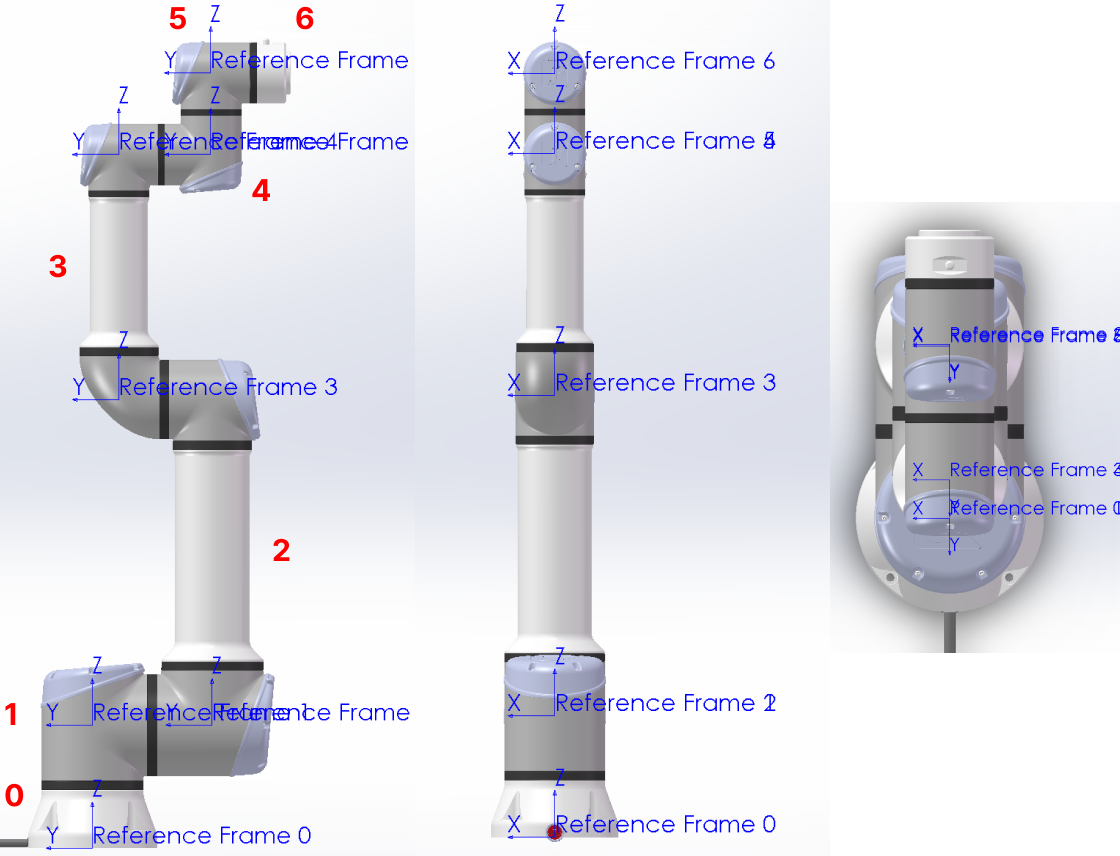
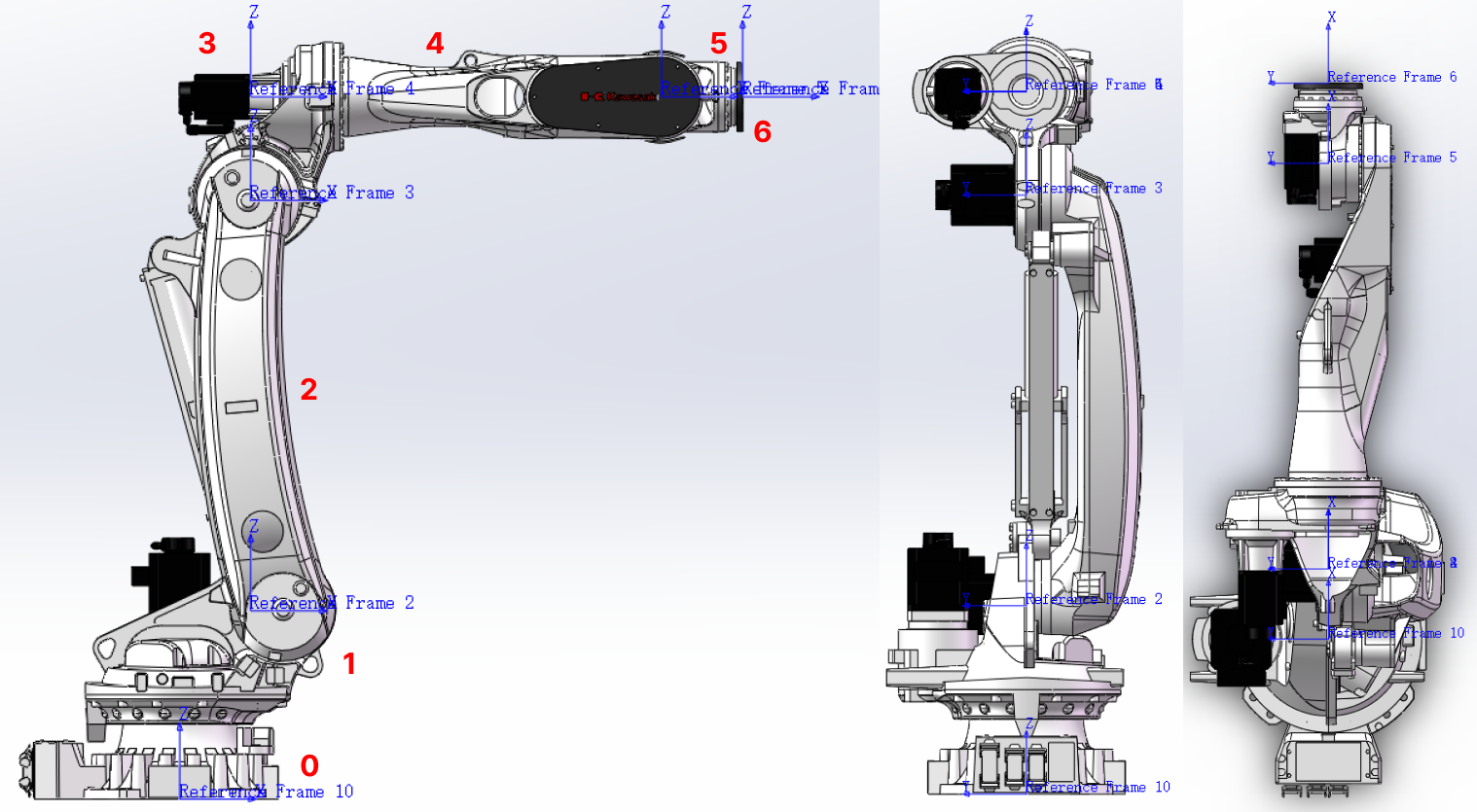
좌표계 각 축 이름 |
|
|
|||
커넥팅 로드와 좌표계의 대응 관계 |
0:좌표계10; 1:좌표계10; 2:좌표계2; 3:좌표계3; |
4:좌표계4; 5:좌표계5; 6:좌표계6; |
0:좌표계10; 1:좌표계10; 2:좌표계2; 3:좌표계3; |
4:좌표계4; 5:좌표계5; 6:좌표계6; |
|
[robot]_algo 예시 |
{
"algo_type": "UR_UR5_Like",
"robot_type": "UR_16E",
"dh": [ A, B, D, G, F, H ],
"shoulder_offset": C,
"elbow_offset": E,
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
{
"algo_type": "SphericalWrist_SixAxis",
"robot_type": "KAWASAKI_CX110L",
"dh": [ A, B, C, D, E, F ],
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
|||