visual_move¶
Function
This Task guides the robot to move according to the poses received from vision services.
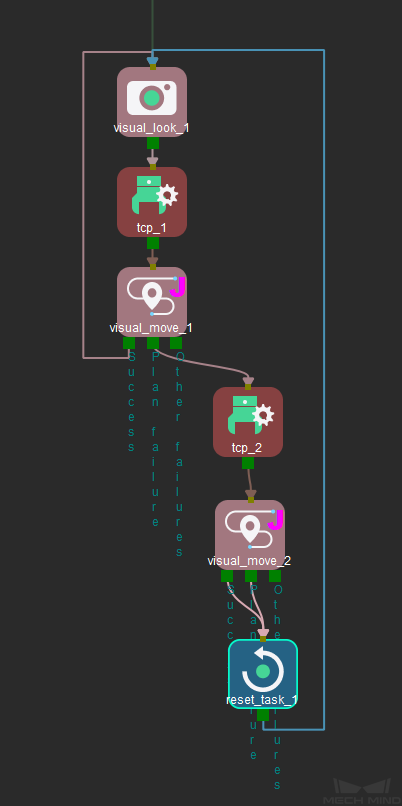
Exit Port |
Description |
Success |
The path was planned successfully. |
Plan failure |
The path planning failed. |
Other failures |
There are no available poses for planning. Possible reasons: Mech-Vision did not output poses. The poses output by Mech-Vision cannot meet the requirement. |
Sample Scenario
This Task is usually used when the robot picks objects.
Parameters
General Parameters
Please refer to General Parameters of Move-Type Tasks for detailed descriptions.
Critical
- All Targets in One Move
- Reuse Vision Result
- Share Vision Result
Operational Mode
There are three types of operational modes as shown below, and each of them has different parameters.
Other Settings
Parameter |
Description |
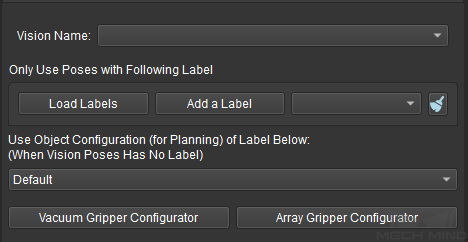
Vision Name |
The project selected here is usually the same as the one in visual_look. |
Only Use Poses with Following Label |
The vision result may contain different labels. Once a specific label is selected, only the pickable objects with the selected label will be picked. |
Click Load Labels or Add a Label to select the label. Once the label is selected successfully, the label name will be displayed on the button on the right. |
|
Click |
|
Use Object Configuration (for Planning) of Label Below: |
Select the object label set in , and the corresponding object configuration will be applied in visual_move. |
Select Default when there is no label in the vision result. |
|
Select the corresponding label in the vision result when there is an available one. |
|
Vacuum Gripper Configurator |
Please refer to Vacuum Gripper Configurator for detailed information. |
Array Gripper Configurator |
Please refer to Array Gripper Configurator for detailed information. |