Regular Mode¶
The parameters in the regular mode are shown in the figure below.
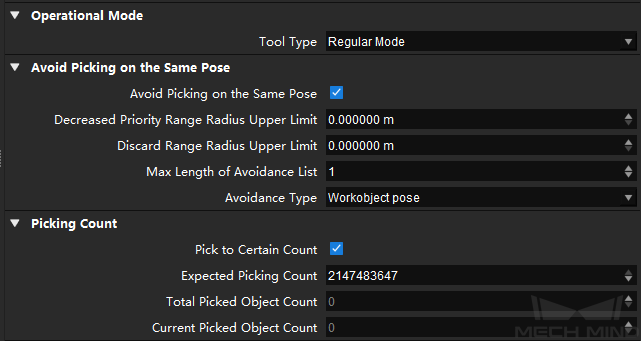
Avoid Picking on the Same Pose
This parameter group is mainly used to avoid picking on the same pick point in scenarios where the object cannot be picked successfully.
- Decreased Priority Range Radius Upper Limit
- Default setting: 0Description: If the distance between the current pick point and the most recently tried pick point is less than this value, the two pick points will be considered the same one, and the priority for picking will be downgraded.
- Discard Range Radius Upper Limit
- Default setting: 0Description: If the distance between the current pick point and the lastly tried pick point is less than this value, the pick point will be discarded for picking.Example: For example, if the robot only moves the workpiece but fails to pick it on the first attempt, there is a possibility of successful picking on the next attempt. In this case, Decreased Priority Range Radius Upper Limit can be set to downgrade the priority for picking the workpiece, while the object pose will be kept. When the robot fails to move the workpiece at all in the first attempt, it is highly unlikely that the workpiece can be picked successfully in the next attempt, and therefore Discard Range Radius Upper Limit can be set to discard the pose directly.
- Max Length of Avoidance List
- Default setting: 1Description: The maximum length of the avoidance list.Example: Assuming that the value is set to 2 and Mech-Vision outputs 3 poses when pose 1 is used and the picking fails, pose 1 will be recorded. Pose 2 will also be recorded if the picking fails. However, when pose 3 is recorded, pose 1 will be discarded, and only pose 2 and pose 3 will be kept in the avoidance list.
- Avoidance Type
- Workobject pose: Record the pose of the workobject. If the object has 3 pick points, and one of them was recorded as used during a failed picking, the rest two will not be included in the avoidance list.Workobject: Record the workobject. If the object has 3 pick points, and one of them was recorded as used during a failed picking, the rest two will be included in the avoidance list as well and the object will not be prioritized for picking next time.
Picking Count
This parameter group is used to count the picked objects and calculate the rest objects to be picked. Once you enter an Expected Picking Count, the Total Picked Object Count and Current Picked Object Count will be calculated automatically.
- Expected Picking Count
The maximum number of picked objects.
- Total Picked Object Count
The number of picked objects, which is counted automatically and cannot be modified.
- Current Picked Object Count
The number of the currently picked object, which is counted automatically and cannot be modified.