Collisions¶
In applications such as machine tending and (de)palletizing, avoiding collisions between the robot and other objects is crucial to keeping the project going non-stop.
Mech-Viz can detect possible collisions and plan the robot path accordingly, so that the resulting path is collision-free.
If collision cannot be avoided, Mech-Viz will stop the project and display the detected collision in the 3D simulation area, so that you can adjust the project accordingly.
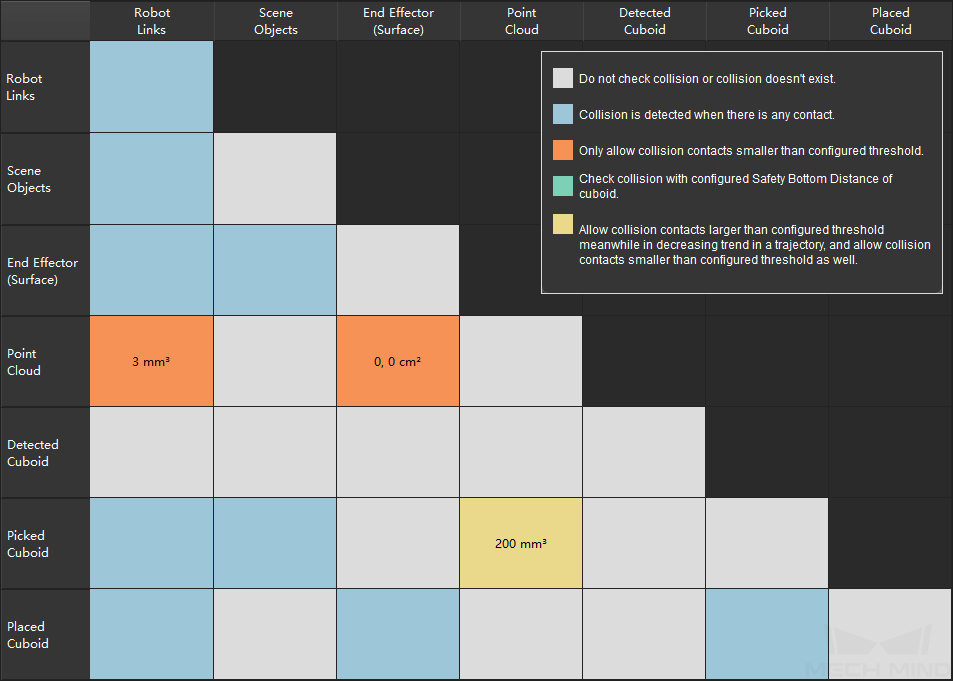
Collision occurs between two objects. In the Collisions tab, you can set between which two types of objects you’d like to check for collisions, such as point cloud and other objects. The above chart displays the collisions checked in the current project, and the color of each cell corresponds to the specific collision detection settings for the object pair.
Check the following chapter to learn about Computation Settings which affects speed of collision detection.
Check the following chapters to learn about the configurations of collision detection.