3. Robot Link Configuration¶
In this pane, you can select the part(s) of the robot to be taken into consideration during the collision detection.

Note
This pane is configurable only after you enable Detect collision between point cloud and others.
Note
Collisions between the following object pairs involving the robot links are checked by default and cannot be configured:
Robot links and robot links
Robot links and scene objects
Robot links and robot tool
The robot is divided into four parts: wrist, forearm, upper arm and base. You can enable the part(s) that you’d like to check for collisions. Enabled parts are highlighted in the 3D simulation area.

After you enable any of the robot parts, the collisions between robot links and point cloud will be checked.
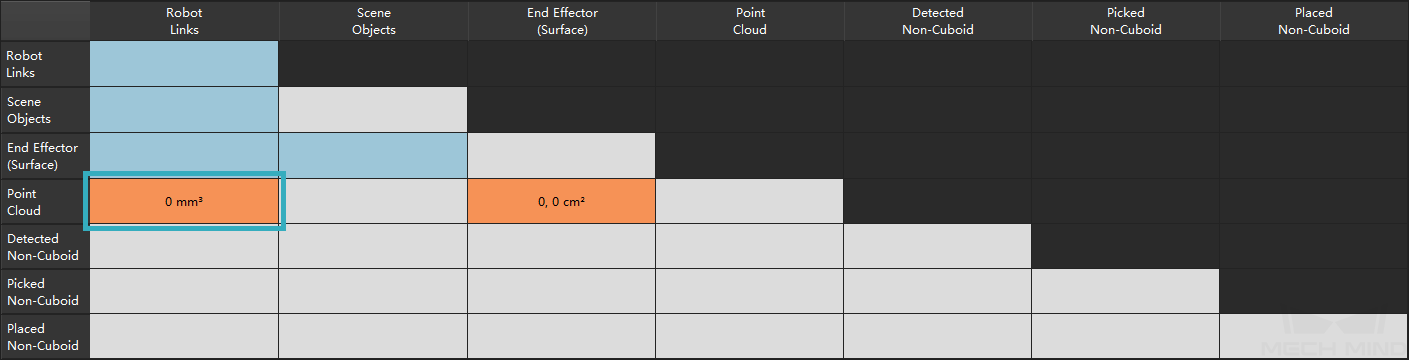
Collision volume threshold: set how large a volume of each robot link is allowed to collide with the point cloud at a target pose.
The default value is 0 (no contact between robot links and point cloud is allowed).
Note
If you have enabled Detect collision between picked object and others, the collisions between robot links and picked workobjects are also checked. However, Collision volume threshold only applies to the collisions between robot links and point cloud. That is, any contact between robot links and picked workobjects is regarded as collision occurred.
